(54) ПОЛИСПАСТ
| название | год | авторы | номер документа |
|---|---|---|---|
| Козловой кран для гидротехнического затвора | 1985 |
|
SU1312059A2 |
| Козловой кран для гидротехнического затвора | 1986 |
|
SU1428683A2 |
| Грузоподъёмный механизм (варианты) | 2023 |
|
RU2809870C1 |
| Грузоподъемный кран | 1990 |
|
SU1789498A1 |
| Стреловой самоходный кран | 1985 |
|
SU1344726A1 |
| Подъемный механизм, преимущественно для гидротехнических затворов | 1985 |
|
SU1567502A1 |
| Грузовой полиспаст | 1990 |
|
SU1789501A1 |
| Козловой кран для гидротехнического затвора | 1982 |
|
SU1084234A1 |
| ГРУЗОПОДЪЕМНЫЙ КРАН | 1972 |
|
SU434055A1 |
| ГРУЗОПОДЪЕМНАЯ ТЕЛЕЖКА С КАНАТНОЙ ТЯГОЙ | 2005 |
|
RU2288163C1 |
1
Изобретение относится к грузоподъемным устройствам, а именно к полиспастам, используемым преимущественно в подъемных механизмах гидротехнйчесних сооружений для подъема затворов.
Известен полиспаст, содержащий огибаемые грузовым канатом неподвижные блоки, закрепленные на раме подъемного механизма, и подвижные блоки, установленные на грузовой подвеске 1.
Однако такой полиспаст не позволяет увеличивать кратность.
Для некоторых типов затворов, в частности для затворов с замещающим кольцом, которые при открытии водопропускного отверстия опускаются вниз, подъемное усилие изменяется по возрастающей кривой и достигает максимума к концу подъема. Для таких затворов, чтобы не увеличивать грузоподъемность и марсу подъемных механизмов, желательно иметь полиспаст, КОторый позволял бь1 увеличивать кратность к концу подъема.
Целью изобретения является обеспечение возможностл увеличения кратности полиспаста.
Это достигается тем, что през лагаемый полиспаст снабжен .вспомогательными блоками, установленными на отдельной оси, и направлающийи, выполненными с треугольными профильными ВЕлрезами, лри этом на грузовой подвеске смонтированы ползуны, контактирующие с направляющими и выполненные с треугольными профильными вырезами, в которых расположена ось вспомогательных блоков, взаимодейств угощая в зоне изменения кратности с треугольными вырезами направляющих
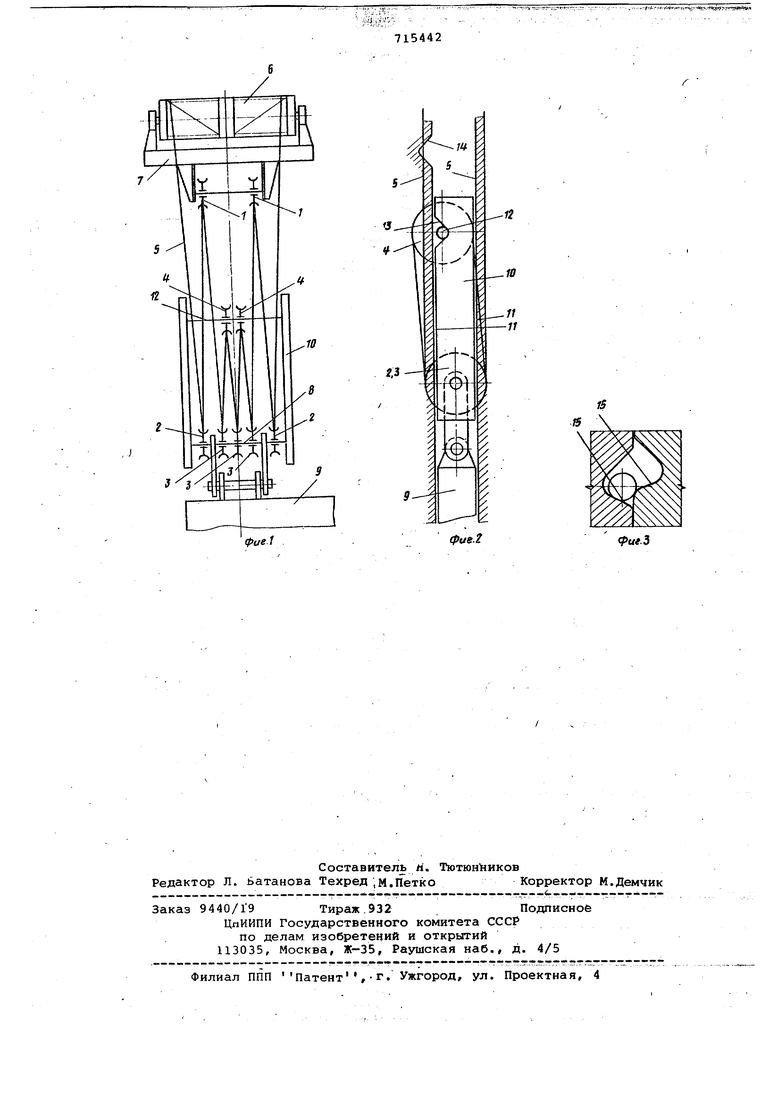
На фиг. 1 изображена кинематичес;кая схема описыва:емого полиспаста; на фиг. 2 - то же, вид сбоку; на фиг. 3 - вариант профиля рабочей кроки треугольного выреза.
Полиспаст состоит из неподвижных 1, подвижных 2 и 3 и вспомогательных 4 блоков, на которые запасован грузовой канат 5, прикрепленный к барабану подъемного механизма 6. Неподвиные блоки 1 закреплены на раме 7 подъемного механизма 6. Подвижные блоки 2 и 3 объединены в грузовую подвеску 8, соединяемую с грузом, например, с гидротехническим затворо 9. Грузовая подвеска 8 снабжена ползунами 10, перемещающимися в йаправляющих 11. Вспомогате.льные блоки 4 установлены на отдельной оси 12, расположённой в треуголбнйх вырезах 13 ползунов 10. Расстояние между осями подвижных бликов 3 и вспомогательных блоков 4 определяется требуемой Высотой прдтье 1а груза после изйёнений кратности. Направляющие 11 в месте, в котором необходимо изменить кратйость полйёпаста, также имеют треугольныеэырезы 14, обращенные в сто|$ерй1 трбз г6яьных йвфезов в ползуне. Рабочие кромки 15 треугольных вьгрёзов 13 и 14 при необходимости -Снижения динамических нагрузок могут быть спрофилированы по любой кривой, полученной феоретически или зксперименральнр,- дающей наименьшую динамику пере} бДйдгб п роцесса при изменении
Кратности. , , .. ,,
Полирпаст работает следующим обра.зом; . .. .,
в процессе подъема груза, например гидротехнического затвораt направля}ощие 11 не позволяют оси 12 выка-. титься из треугольного выреза 13, в ре&ультатё чего вспомогательные бло.ки. 4 перёмёщакисясовместно с подвижными блоками 3, образуя с ними одич целостный узел, не имеющий кратности. При этом полиспаст работает
с Кратностью, определяемой подвижными блоками 2 и неподвижными блоками
вырез 14, В момент точного совмеще- : ния обоих вырезов ось 12 сйМ: 1€ трйЧйО располагается во впадине, образованной обоими вырезами. При дальнейшем подъеме ползуна Ю ось 12 продолжает перекатываться из выреза 13 в вырез 14. После ггдяногб з ахЬйа оси 12 в вырез 14 последний запираётсятелом ползуна Ю. Вспомогательные блоки 4 становятся нбпойвижными, при этом блоки 3 и 4 образуют дополни тельный полиспаст с определённой крат
ностью, увеличивающей кратность всего полиспаста.
При опускании груза процесс перехода оси 12 из выреза 14 в вырез 13 будет происходить аналогично описанному выше.
В процессе перехода из одного выреза в другой ось 12 постоянно опирается на рабочие кромки 15 обоих вырезов, перекатываясь по ним. Если кромки спрофилированы .по определенной кривой, то процесс перекатки будет происходить плавно, при этом динамические нагрузки на подъемный механизм снижаются.
Конструкция полиспаста позволяет значительно снизить грузоподъемность следовательно, и металлоемкость подъемных механизмов при маневрировании указанными вьние затворами.
. формула изобретения
Полиспаст, преимущественно для подъемных механизмов гидротехнических сооружений, содержащий огибаемые грузовым канатом неподвижные блоки, закрепленные на раме подъемного механизма, и подвижные блоки, установленные на грузовой подвеске, отличающийся тем, что, с целью увеличения кратности полиспаста в процессе подъема, он снабжен вспомогательными блоками, установленными на отдельной оси, и направляющими, выполненными с треугольными профильными вырезами, при этом на грузовой ПбДвеске смонтированы ползуны, контактирующие, с направляющими и выполненные с треугольными профильными вырезами, в которых расположена ось вспомогательных блойов, взаимодейств5тощая в зоне изменения кратности с треугольными вырезами направляющих.
Источники информации, принятие во I внимание при экспертизе
фие1
715442
фие.2
«г.З
