1
Изобретение касается транспортирования иг делий конвейерами и относится к устройствам для передачи изделий типа бутылок с одного конвейера на другой.
Известно устройство для передачи изделий с одного конвейера на другой, имеющее укрепленный на раме между подающим и приемным конвейерами передающий конвейер, снабженный манипуляторами с приемными площадками и захватами, имеющими механизм управления (1.
Такое устройство не обеспечивает передачу изделий в горизонтальной плоскости и обладает мшюй производительностью из-за вдкличаского перемещения перегрузочного конвейера н применения захватов только для одного изделия.
Наиболее близким по технической сущности и достигаемому эффекту к изобретению является устройство для передачи изделий с одного конвейера на другой, имеющее укрепленный на раме между подающим и приемным конвейерами передающий конвейер, содержащий манипуляторы с приемными площадками для изделий, укрепленные с возможностью перемещения в горизонтальных и вертикальных направляющих 2.
Недостатком этого устройства является его малая надежность из-за отсутствия фиксации изделий при передачи изделий типа бутылок.
Цель изобретения - обеспечение надежности в работе устройства за счет фиксации изделий типа бутылок.
Это достигается тем, что каждый из манипуляторов снабжен клещевидными захватами установленными с помощью осей на приемной площадке и имеющими механизм управления. Механизм управления захватами выполнен в виде подпружиненной тяги, установленной с возможностью перемещения в горизонтальной направляющей, причем один конец тяги прикреплен к захватам, а другой имеет ролик, взаимодействующий с упорами, которые размещены на раме передающего конвейера, при зтом тяга выполнена с вырезом и снабжена фиксатором, установленным на горизонтальной направляющей с возможностью перемещения в вырезе тяги в месте установки упоров.
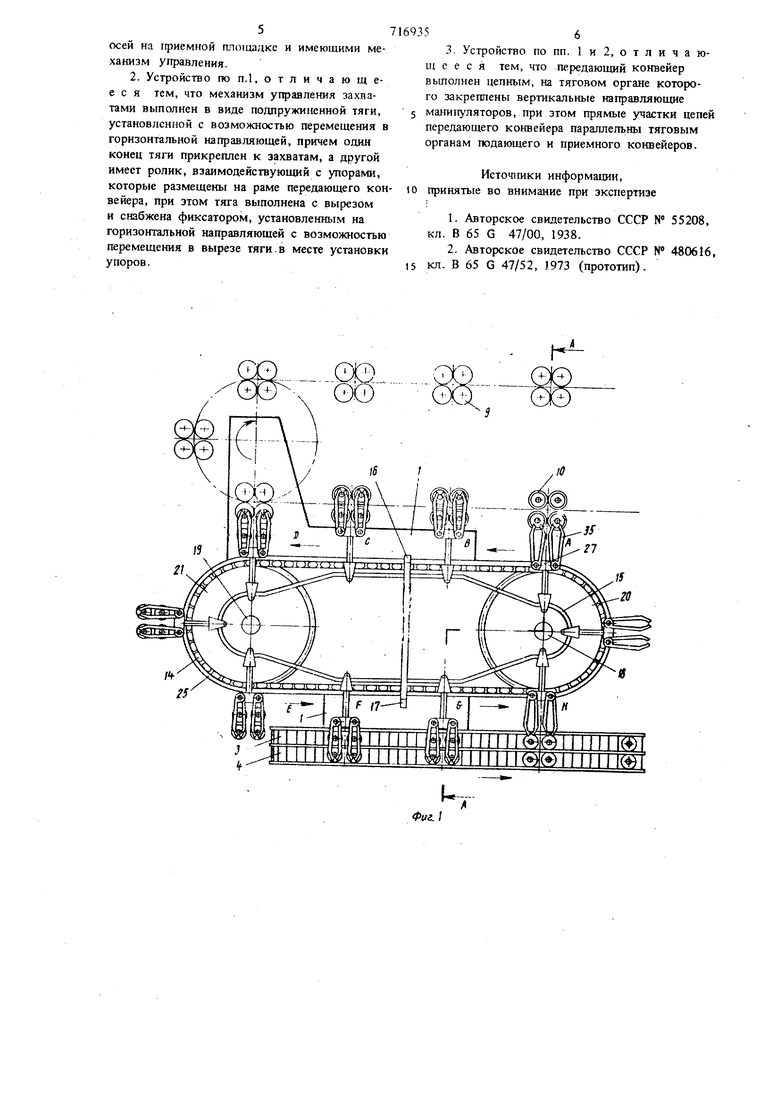
Кроме того, передаю1Щ1Й конвейер выполнен цепным, на тяговом органе которого закреплены вертикальные направляющие манипуляторов, при этом прямые участки цепей псречаюшего к(пгое йера параллельны прямьЕм участкам тяговых органов подающего и приемного конвейеров, На фиг. 1 изображено предлагаемое устройство, вид сверху; на фиг. 2 - разрез А-А на фиг.1; на фиг. 3 - конструкция макииулятора, вид в аксонометрии. Устройство для передачи изделий с конвейера на другой имеет общую раму стойками 2, на которых расположены потоки 3 пластинчатого конвейера, перегрузочный конвейер и подвесной ко1шейер, имеющий монорельс 5 кареток 6, соединенных с тяговым органом 7 и подвесками 8 с гнездами 9 для (5уты лок 10, колесо II с валом 12, снабженным звездочкой 13; перегрузочнь й конвейер с укре ленными на раме 1 копирами 14, 15, упорами 16, 17, валами 18, 19 с зубчатыми колесами 20, 21, редуктором 22, звездочкой 23, с цепью 24. Вал 18 конической парой соединен с пласти чат,1м ко шейером. При этом з бчатьш колеса 20, 21 связаны цепью 25 с укрепленнылда на не вертикалылыми направляющими 26 манипулято ров 27, каждый из которых имеет вертикальный толкатель 28, снабженный роликом 29, к гор 13он7алы{ую направляющую 30 горизонтал ного толкателя 31 с роликом 32 и пло цадкоГ1 гчташпгулятора 33, iia который осям 34 укреплены рычаги клещевидных захватов 35 с ccpf,raN5H 36, связанными аилкой 37 г.техагшз.мом упрайлснмя в вял.е тяги 38, которая имеет пружину 39, Bbipc3 40 фиксатора 41 и ролик 4 Устройство работает следующим образом. В исходном полоижи-ип (точка .А. на фиг. 1) магшпулятор 27 расположен в крайтюм тюлож imn к оси перс груз очцо го конг; йера и его захваты 35 кэжзгдлгся прот1 з горлышек бутылок 10, размещеннь;х в гнездах 9 подвески 8, а гфужи:,а 39 удерживает тягу управлении 38 в крайнем от эсй перегру:юч} ого KOHBeiiepa положеш, обесаечивая с помощью серьг 36 удержание захватов 35 и раскрытом состояиг1И При работе устройства бутьшки 10 перемещаются конвейерами в направлении, указанном стрелка.ми на фиг. 1. Тяговый орган 7 (см. фет. 2) с подвесками 8 переме1даются к с помощью колеса И, его вала 12, звездочки 13 и uciiH 24 передает вращающ.ий момент звездочке 23, редуктору 22, валу 19 и зубчатому колесу 21, которое, вратцаясь, перемещает цепь 25 с ма шцуляторами 27. Цеш. 25 (см. фиг. 1), перемещаясь, вращает зубчатое колесо 20 и его вал 18, а последний, с помощью зубчатой передачи с коническими колесами, перемещает потоки 3,4 гшасти гчатого конвейер При движении манипулятора 27 (см. фиг. 1) из точки .Л к точке В ролик 29 (см. фит. 3) вертикального толкателя 28 перемепдается по ко1шру 14, а ролик 32 горизонтального толкателя 31 перемещается по KOitupy 15, смещая захваи.1 35 за горлышки бутылок 10, расположенных на подвесном конвейем. Движение манипулятора 27 к точке С вследствие взаи иодействия ролика 42 с упором 16 вызьшает перемещение тяги управления 38 к оси перегрузочного конвейера, которая , возделсгвуя на серьги 36, закрывает захваты 35 на горльгшках бутылок Ю, а в конце кода тяги управлеш.ч 38 ее вьфез 40 совмещается с фиксатором 41, который фиксирует закрьггое состояние захватов 35, после чего рол як 29 тяги 28, двигаясь по копиру 4, перемещает манипулятор 27 с захватам 35 вверх, чем осуществляется вывод бутылок 10 (см. фиг. 2) из гнезд 9 подвесок 8. Дальнейшее движение манипулятор-: 27 (см. фиг. 1) осуществляет отвод захватов 35 с бутылками 10 к оси перегрузочного когшейера (точка D), перенос их к пластинчатому конвейерУ (точка Е) и перемещение захватов 35 от оси перегрузочного конвейера (точка F). Движение манипуляторов 27 к точкеС обеспечивает плавное опускание захватов 35 с бутьшками 10 до соприкосновения их дотгьпиек с потоками 3,4 пластинчатого когшейера. вызывает взаимодействие упора 17 с фиксаторами 4, который выходит из выреза 40 тяги упра.вления 38 и она под действием пружины 39, перемешаясь от оси перегрузочного конвейера, открывает захваты 35, освобождая горлЕлпкн бутылок 10. Дшп нейшее перемещение манипулятора 27 обеспечивает отвод захватов 35 от оси ;аластинитого конвейера (точка Н) и перемегц.еш-е захватов 35 к оси подзесного .;ог-1Бейера в нсходкое положение (ТОЧКЕ А). Гкхледующке пере,) манипулятора 27 5у:1ет повторят) 01 ИсангП Й . Рассмотрены различктме фазы перемещения едкого мднигплятор1, фактически все деся-1Ъ маггипулгшров при .ieijteiDiH цепи 25 с направляю;цим}с 2о повторяют описанный цикл одновремекно с в том, что каждый маниггуляхоя нйчинает и оканщ вает цикл в своей фазеФормула изобретения 1. Устройство для передачи 11здея11й с одного KORBeTsepa ка другой, имеющее укреаген.ный на ра.ме гкхдающим и приемггым конвейерами передаюгянй конвейер, содержащий манипуляторы с прие-.чыми шголаддами для изделий, установлен {ые с вoз foжнorrью перемещения в горизонтaJibKbtx и вертикальных направляющих, отличающееся тем, что, с целью обеспечен я надежности в работе устройства за счет фиксации изделнй типа бутылок, каждый из .манипуляторов сгибжен клещевидiibL4 захватами, установленными с помощью
осей на приемной площадке и имеющими механизм управления.
2. Устройство по пЛ, о т л и ч а ю щ ее с я тем, что механизм управления захватами выполнен в виде подпружиненной тяги, установленной с возможностью перемещения в горизонтальной направляющей, причем один конец тяги прикреплен к захватам, а другой имеет ролик, взаимодействующий с упорами, которые размещены на раме передающего конвейера, при этом тяга выполнена с вырезом и снабжена фиксатором, установленным на горизонтальной направляющей с возможностью перемещения в вырезе тяги.в месте установки упоров.
3. Устройство по пп. 1и 2, отличающее с я тем, что передающий конвейер вьшолнен цепным, на тяговом органе которого закреплены вертикальные направляюаще 5 манипуляторов, при этом прямые участки цепей передающего конвейера параллельны тяговым органам подающего и приемного конвейеров.
Источники информации, 10 принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 55208, кл. В 65 G 47/00, 1938.
2.Авторское свидетельство СССР N 480616, 15 кл. в 65 G 47/52, 1973 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для визуального контроля наполненных бутылок | 1986 |
|
SU1355609A1 |
| Линия горячей штамповки | 1989 |
|
SU1707466A1 |
| Автоматическая линия формирования садки кирпича на печной вагонетке | 1983 |
|
SU1178604A1 |
| КОМПЛЕКС ПОДЪЕМНО-ТРАНСПОРТНОГО ОБОРУДОВАНИЯ ДЛЯ УТИЛИЗАЦИИ ЖИДКИХ РАДИОАКТИВНЫХ ОТХОДОВ НА АТОМНОЙ ЭЛЕКТРОСТАНЦИИ И ЕГО СОСТАВНЫЕ ЧАСТИ | 2007 |
|
RU2350545C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ГОРОДСКОЙ КОМПЛЕКС И АВТОМАТИЗИРОВАННАЯ ПОДЗЕМНАЯ СИСТЕМА АДРЕСНОЙ ДОСТАВКИ ГРУЗОВ | 2013 |
|
RU2526202C1 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
| Автоматическая линия погрузки кирпича на печные вагонетки | 1983 |
|
SU1159787A1 |
| Устройство для замены роликоопор | 1990 |
|
SU1794040A3 |
| Тележечный конвейер | 1981 |
|
SU1008102A1 |
| Захват манипулятора для ферромагнитных цилиндрических изделий | 1983 |
|
SU1224130A1 |

716935
Д повернуто
