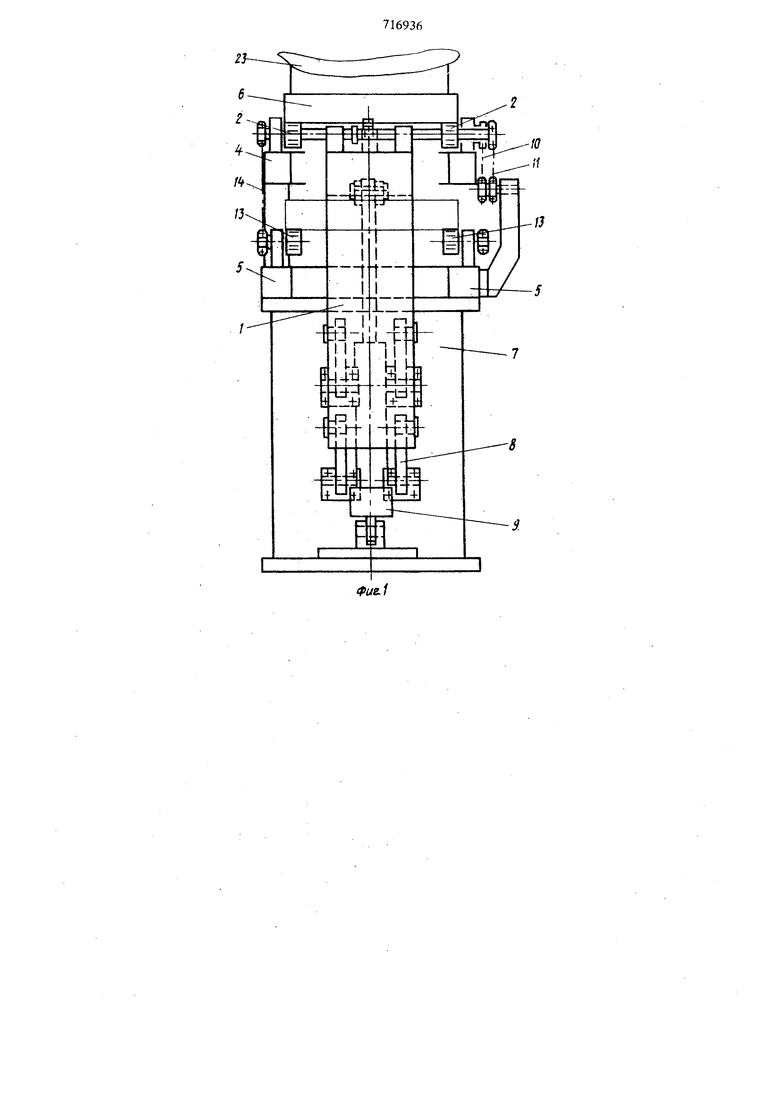
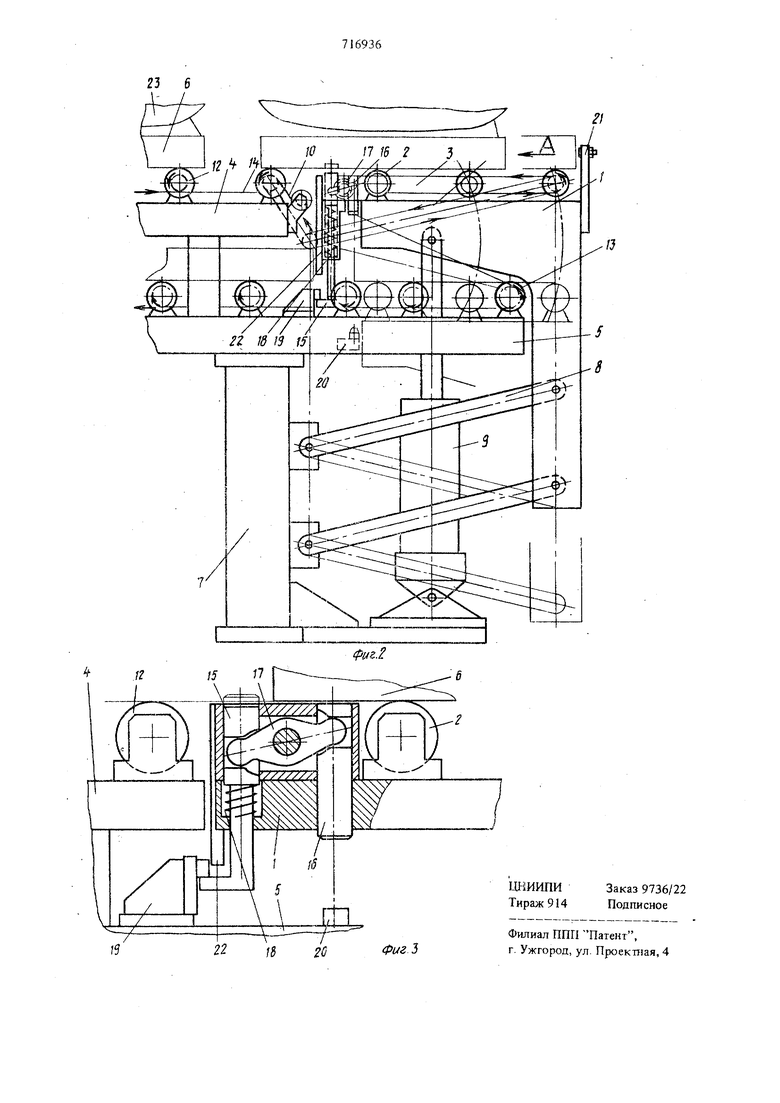
Изобретение относится к области промышленного транспорта. Известны подъемные устройства автоматических линий, содержащие подъемно-опускную платформу с приводными роликами, расположе ную между двумя ко1гоейерами 1. Однако указанные устройства недостаточно эффектршны. Известно также подъемное устройство авто магической линии спутникового типа, содержащее подъемно-опускную платформу с привод нътми роликами, расположенную между основным роликовым конвейером и роликовым кон вейером возврата спутников 2. В указанном устройстве крайний ролик подъемно-опускной платформы снабжен подпружиненным рычагом, свободно установленны иа оси крайнего ролика и несущим ведомую шестерню, зацепляющуюся с ведущей шестерней, установленной на конвейерах. Недостатком данного устройства является недостаточная надежность его работы вследстви наличия ударного контакта ведомой шестерни подъемной платформы с ведущей шестерней конвейеров. Целью изобретения является повьциение надежности работы устройства. Это достигается тем, что платформа снабжена подпружиненным фиксатором, взаимодействующим с упорами, расположенными на конвейере возврата, при этом ролики платфор 1ы установлены с возможностью расположения их при нижнем положении платформы между роликами конвейера возврата и ниже этих роликов. Фиксатор целесообразно выполнить. в виде пары толкателей, соединенных двуплечим рычагом. На фиг. 1 изображен общий вид. подъемного устройства сбоку; на фиг. 2 - то же, вид спереди; на фиг. 3 - фиксатор в разрезе. Подъемное устройство содержит подъемноопускную платформу 1 с приводными роликами 2, на звездочках которых натянута цепь 3. Платформа расположена между основным роликовым конвейером 4 и роликовым конвейером 5 возврата спутников 6. Ко1свейеры 4 371 и S смонтированы на стойках 7. Со стойкой 7 связана платформа 1 с помощью рычагов 8, которые определяют траекторию движения lгпaтфop tt.I. Платформа перемещается циливдром 9. Цепи 10 и И связьшают ролики 2 платформы 1 с роликами 12 основного конвейера 4, которые вместе с роликами 13 конвейе{а возврата 5 приводятся во вращение от одного привода (на чертеже не показан) посредством цепной передачи 14. Роли:си 2 установлены на платформе 1 таким образом, что в крайнем нижнем полох ении платформы они располагаются между роликами 13 конвейера возврата и ниже этих роликов. Платформа снабжена фиксатором, выполненным в виде пары толкателей 15 и 16, соеддшен ных двуплечим рыщгом 17. Фиксатор связгш с пружиной 18. На конвейере возврата размещены упоры 19 и 20, периодически взаимодействующие с фикса тором. На платформе 1 размещен упор 21, удерживающий спутншси в крайнем положении, а также планка 22, которая отсекает движение сггутнико на конвейере возврата при подъеме платформы 1. Работа устройства осуществляется сле,цующим образом. Спутники 6 с деталями 23 перемещаются в направлении стрелки А (фиг.2) по вращаюидамся роликам 2 платформы 1, находящейся в верхнем положении, и поступают на основной конвейер 4. После ухода спутников с платформы она опускается при помощи гидроои-гшадра 9. В нижнем положении ролики 2 платформы располагаются между роликами 13 конвейера 5 возврата. Поэтому спутник может конттстировать только с роликами 13. При опускании платформы правый толкатель 16, встретив упор 20, перемещается вверх и через рычаг 17 опускает левый толкатель 15 так, тго спутник с конвейера возврата 5 получает возможнос1ъ пройти над платфсфмой 1 до упора 21, после чего платформа начинит подниматься. Во время этого даижсния спутник зафиксирован на платформе. Фиксацяя осуществляется при размыкании контакта толкателя 16 с упором 20 за счет пружины 18, вводящей левый толкатель 15 в гнездо спутника. Когда спутник 6 достигает крайнего верхнего положения фиксатор расфиксирует спутник на платформе при подходе левого толкателя 15 к упору 19, после чего вращающиеся ролики 2 переместят спутник на ролики 12 основного конвейера. Таким образом, устройство позволяет не останавливать и не реверсировать вращение роликов платформы, избегая ударного контакта в передаче, повыщая надежность работы. Формула изобретения 1. Подъемное устройство автоматической лийш спутникового типа, содержащее под емно-опускную платформу с приводными роликами, расположенную между основным роликовым конвейером и роликовым конвейером возврата спутников, отличающееся тем, что, с целью повыщения надежности раСюты, платформа снабжена подпружинеьшым фиксатором, взаимодействующим с упорами, расположенными на конвейере возврата, при этом ролики платформы установлены с возможностью расположения их при нижнем положении платформы между роликами конвейера возврата и ниже этих роликов. 2; Устройство поп.1,отличающеес я тем, что фиксатор выполнен в виде двух толкателей, соединенных двуплечим рычагом. Источншси информацни, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 461875, кл. В 65 С 47/52, 1972. 2.Авторское свидетельстйо СССР N 585046, кл. В 23 Q 7/14, 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортирующее устройство | 1979 |
|
SU876515A1 |
| Устройство для опускания спутников с одного уровня на другой | 1983 |
|
SU1137034A1 |
| Устройство для кантования изделий | 1990 |
|
SU1724552A1 |
| Устройство для укладки изделий в стопу | 1989 |
|
SU1722953A1 |
| Инерционный конвейер | 1987 |
|
SU1452756A1 |
| Автоматизированная сборочная линия | 1985 |
|
SU1306691A1 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
| Автоматическая линия для производства керамических изделий | 1986 |
|
SU1369898A1 |
| Устройство для передачи штучных грузов с одного конвейера на другой | 1981 |
|
SU988709A1 |
| Машина для упаковывания в ящик штучных изделий | 1979 |
|
SU956355A1 |