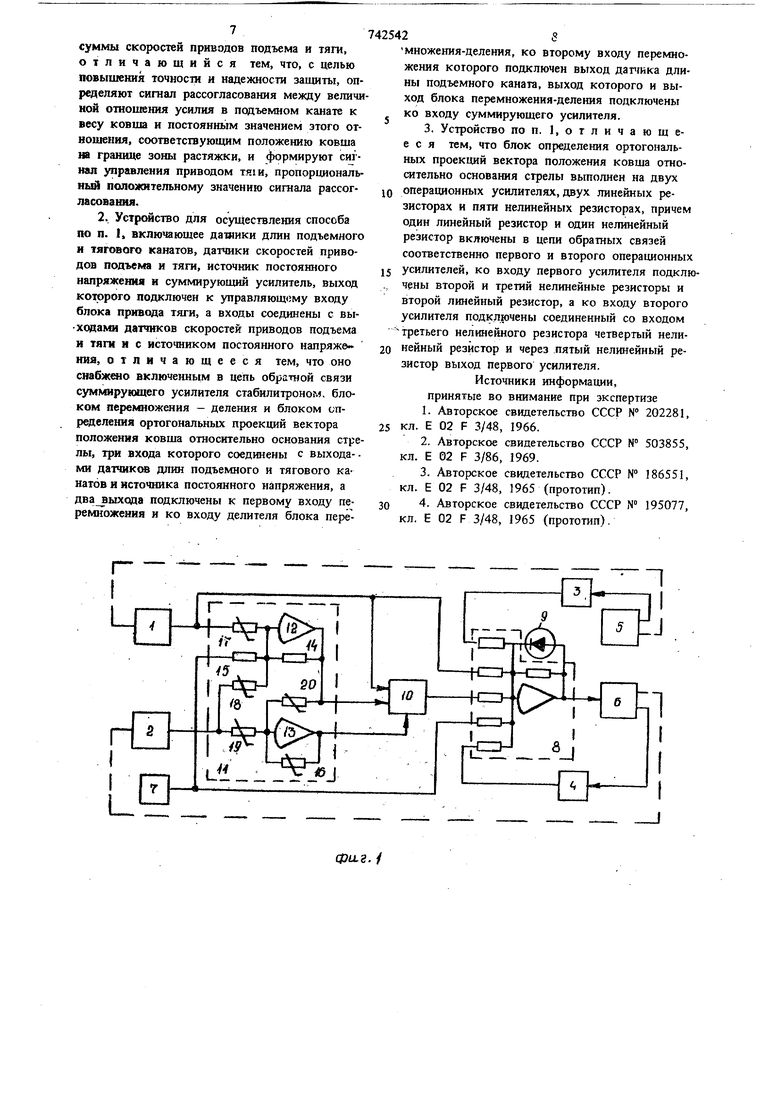
Цель изобретения - повышение точности к надежности защиты драглайна от аварийного режима растяжки. Эта достигается тем, что определяют сигаал рассогласования между величиной отношения усилия в подъемном канате к весу ковша и постоянным значением этого отношения, срответствуюшлм положению ковша на границе зоны растяжки и формируют сигнал управления приводом тяги, пропорциональный положительному значению сигнала рассогласования. Устройство для осушествления указанного способа снабжено включенным в цепь обратной связи суммирующего усилителя стабилитроном, блоком перемножений-деления и блоком оп- . ределения ортогональных проекций вектора пол жения ковша относительно основания стрелы, три входа которого соединены с выходами датчика длин подъемного и тягового канатов и источника постоянного иапряжения, а два выхода подключены к первому входу перемножения и ко входу делителя блока перемножения-деления, ко второму входу перемножения которого подключен вь1ход датчика длины подъемного каната, выхо которого и выход блока перемножения-деления подключены ко входу суммирующего усилителя При этом блок определения. ортогональных про еквдй вектора положения ковша относительно основания стрелы выполнен на двух операционных усилителях, двух линейных резисторах и пяти нелинейных резисторах, причем один линейный резистор и один нелинейный резистор включены в цепи обратных связей соответствен но первого и второго операционных усилителей при этом ко входу первого усилителя подключены второй и третий нелинейные резисторы и второй линейный резистор, а ко входу второго усилителя подключены соединенный со входом третьего нелинейного резистора четвертый нелинейный резистор и через пятый нелинейный резистор выход первого усилителя. На фиг. 4 приведена схема устройства для реализации предложенного способа; на фиг. 2 графики, показьшаюшие границы зоны растяжки относительно стрелы и траекторию ковша. Устройство для реализации предложенного способа, содержащее датчики длин подъемного 1 ,и тягового 2 канатов, датчики 3 и 4 скорос тей приводов подъема 5 и тяги 6, источник постоянного напряжения 7 и суммирующий усилитель 8/ снабжено стабилитроном 9, блоком перемножения-деления 10 и блоком 11 определения ортогональных проекций вектора положения ковша относительно основания стрелы который содержит два операционных усилителя 12 и 13, два линейных резистора 14 и 15 и пять нелинейных резисторов с пара олической характеристикой 16 - 19 и 20. Устройство работает следующим образом. Сигналы с выходов датчика I длины L подъемного каната, датчика 2 длины L тягового каната и выходной сигнал источника постоянного напряжения 7, пропорциональный квадрату длины стрелы L, поступают на три входа блока 11 определения ортогональных проекций TI и rj вектора положения ковша относительно стрелы, одна из которых направлена вдоль оси стрелы, а другая перпендикулярь но зтой оси. На входы первого операционного усилителя 12 через второй линейный резистор 15 подается сигнал, пропорциональны величине L, а через второй 17 и третий 18 нелинейные резисторы, благодаря их параболическим характеристакам, сигналы, пропорциоиальные величинам { и t. При зтом выходной сигнал первого операционного усилителя пропорционален величине Г1„2-2 22L На входы вторрго операционного усилителя 13 через четвертый 19 и пятый 20 нелинейные резисторы, благодаря их параболическим характеристикам, поступают сигналы, пропорциональные соответственно величинам 1 и rf, а включение такого же первого нелинейного резистора 16 в цепь обратной 1 связи этого операционного усилителя обеспечивает извлечение корня квадратного из алгебраической суммы входных сигналов, вследствие чего выходной сигиал второго операционного усилителя 13 пропорционален величине гг Га 1К - г Выходные сигналы с первого и второго выходов блока 5, пропорциональные величинам TI и Гг, поступают соответственно на первый вход перемножения и вход делителя блока перемножения - деления 10, второй вход перемножения которого соединен с выходом датчика 1 длины подъемного каната. При зтом выходное напряжение блока перемножения-деления 10 пропорционально величине . которое вместе .с выходным напряжением датчика 1 длины подъемного каната поступает на входы суммирующего усилителя 15 и, при подборе соответствующих коэффициентов усиления по этим входам, формируют иа входе этого суммирующего усилителя 8 сигнал, пропорциональный величине отношения усилия в подъемном канате F и весу ковша JnllL ™f -т7jLугол наклона стрелы драглайна к гогде Q ризонту. 57 Осуществляемое в этом устройстве onpefleление отношения п через величины длин подъемного t,j и тягового f канатов позволяет исключить необходимость определения усилия Р„ в подъемном канате и веса Р ковша. С выхода источника постоянного напряжения 7 на вход суммирующего усилителя 8 поступает сигнал, пропорциональный постоянному значению указанного отношения С, равному уставке защиты исоответствующему положению ковша на границе зоны растяжки. Вместе с ука занным выше сигналом, пропорциональным отношению п , на входе суммирующего усилителя 8 формируется при этом сигнал рассогласования ( п С). Граница 21 (на фиг. 2) зоны растяжки соответствует положению ковша 22 относительно стрелы 23 драглайна , при котором усилие f в подъемном канате 24 при груженом ковше достигает допустимого значения, соответствующего допустимым нагрузкам в механизме и стреле (при транспортировке ковша усилие в тяговом канате 25 всегда меньше усилия в подъемном канате). На этой границе отношени усилия F к весу ковша Р равно постоянной величине С (С 1,9). При этом знак рассогласования величины отношения усилия в подъемном канате к весу ковша и постоянным значением С этого отношения,равным уставке защиты и соответствующем положшию ковша на границе зоны растяжки, характеризует поло жение ковша либо в рабочей зоне (при Рд/Р -С 0), либо в зоне растяжки (при - -С 0). Это обстоятельство используется в способе. Если при движении ковша 22 его траектория (например, траектория 26) направлена из рабочей зоны в зону растяжки, то при подход ковша к границе 21 зоны растяжки сигнал ра согласования (Fjj/P - С) становится положительным, пропорционально этому сигналу рассогласования (при положительном его значении формируют сигнал управления приводом тяги, который исключает движение ковша в зону растяжки. Если при этом происходит подъем ковша, то он будет продолжать движение к вершине стрелы вдоль границы зоны растяжки Благодаря изменению уставки защиты в функции алгебраической суммы скоростей при водов подъема н тяги исключается колебания к перерегулирование во время переходного пр цесса. Сигналы, поступающие на входы суммирующего усилителя с выходов датчиков 3 и 4 скоростей приводов подъема и тяги, обеспечивают изменение уставки защиты в функции алгебраической суммы этих скоростей. Если ковш находится в рабочей зоне и отсутствует опасность возникновения аварийного режима растяжки, формируемый на входе суммир)тощего усилителя 8 сигнал рассогласования между огнощением усилия в подъемном канате к весу ковша и уставкой защиты отрицателен, стабилитрон 9, который работает при этом в режиме диода, открыт и закорачивает цепь обратной связи суммирующего усилителя 8,. обеспечивая нулевое значение его выходного напряжения. При положительном знаке jocasaHHoro сигнала рассогласования ковш приближается к границе зоны растяжки, в результате неправильных действий машиниста на выходе суммирующего усилителя 8 появляется пропорциональный величине этого рассогласования сигнал (отрицательного знака), который поступает на управляющий вход привода тяги 6 и исключает возможность дальнейшего движения ковша к стреле. Если при зтом происходит подъем ковша, то выходной сигнал суммирующего усилителя 8, величина которого огра шчнвается напряжением пробоя стабилитрона 9, скорректирует неточные действия машиниста и обеспечит продолжение подъема ковша по траектории вдоль границы зоны растяжки (при достаточно большом коэффициенте усиления суммирующего усилителя 8 эта траектория будет практически совпадать с границей зоны растяжки). Способ управления электрическими приводами драглайна обеспечивает более точное ограничение зоны растяжки границей, на всем протяжении соответствующей допустимым усилиям в канатах и рабочем оборудовании драглайна, что увеличивает точность и надежность защиты от аварийного режима растяжки, а также способствует повышению маневренности и производительности драглайна за счет обеспечения возможносга более полного использования рабочей зоны траектории ковша. Формула изобретения 1. Способ управления электрическими приводами драглайна . заключающийся в том, что управление приводом тяги производят в функции суммы длин подъемного и тягового канатов, а уставку защиты от аварийного режима растяжки изменяют в функции алгебраической
суммы скоростей приводов подъема и тяги, отличающийся тем, что, с целью повышения точное™ и надежности защиты, определяют сигнал рассогласования между величиной отношения усилия в подъемном канате к весу ковша и постоянным значением зтого отношения, соответствующим положению ковша на границе зоны растяжки, и формируют сшнал управления приводом тя1И, пропорциональный положительному значению сигнала рассогласования.
2. Устройство для осуществления способа по п. 1, включающее датики длин подъемного и тягового канатов, датчики скоростей приводов подъема и тяги, источник постоянного напряжения и суммирующий усилитель, выход которого подключен к управляющему входу блока привода тяги, а входы соединены с вы ходами датчиков скоростей приводов подъема и тяги и с источником постоянного напряжения, отличающееся тем, что оно снабжаю включенным в цепь обратоой связи суммирующего усилителя стабилитроном, блоком перемножения - деления и блоком определения ортогональных проекций вектора положения ковша относительно основания стрелы, три входа которого соединены с выхода-. ми датчике длин подъемного и тягового канатов и источника постоянного напряжения, а два ыхода подключены к первому входу пе ремножения и ко входу делителя блока перемножения-деления, ко второму входу перемножения которого подключен выход дагшка длины подъемного каната, выход которого и выход блока перемножения-деления подключены ко входу суммирующего усилителя.
3. Устройство по п. 1, о т л и ч а ю щ ее с я тем, что блок определения ортогональных проекций вектора положения ковща относительно основания стрелы выполнен на двух
операционных усилителях, двух линейных резисторах и пяти нелинейных резисторах, причем один линейный резистор и один нелинейный резистор включены в цепи обратных связей соответственно первого и второго операционных
усилителей, ко входу первого усилителя подключены второй и третий нелинейные резисторы и второй линейный резистор, а ко входу второго усилителя подключены соединенный со входом Третьего нелинейного резистора четвертый нелинейный резистор и через пятый нелинейный резистор выход первого усилителя.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 202281, кл. Е 02 F 3/48, 1966.
2.Авторское свидетельство СССР № 503855, кл. Е 02 F 3/86, 1969.
3.Авторское свидетельство СССР № 186551, кл. Е 02 F 3/48, 1965 (прототип).
4. Авторское свидетельство СССР № 195077, кл. Е 02 F 3/48, 1965 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления механизмами подъема и тяги драглайна | 1978 |
|
SU874893A1 |
| Устройство для определения загрузки ковша драглайна | 1978 |
|
SU747942A1 |
| Устройство для определения загрузкиКОВшА дРАглАйНА | 1978 |
|
SU812886A1 |
| Способ защиты драглайна от аварийных режимов при транспортировке ковша и устройство для его осуществления | 1978 |
|
SU744076A1 |
| Способ взаимосвязанного управления электроприводами подъема и тяги драглайна | 1971 |
|
SU771833A1 |
| Способ оптимального управления электроприводами драглайна | 1979 |
|
SU926163A1 |
| Устройство для управления электрическим приводом тяги драглайна | 1975 |
|
SU717228A1 |
| Способ защиты стрелы экскаваторадраглайна | 1977 |
|
SU717239A1 |
| Устройство для определения расстояния ковша драглайна от вертикальной плоскости стрелы | 1977 |
|
SU657130A1 |
| Устройство управления электроприводом тяги экскаватора-драглайна | 1981 |
|
SU956697A1 |

фаг./
25
фц,.9
