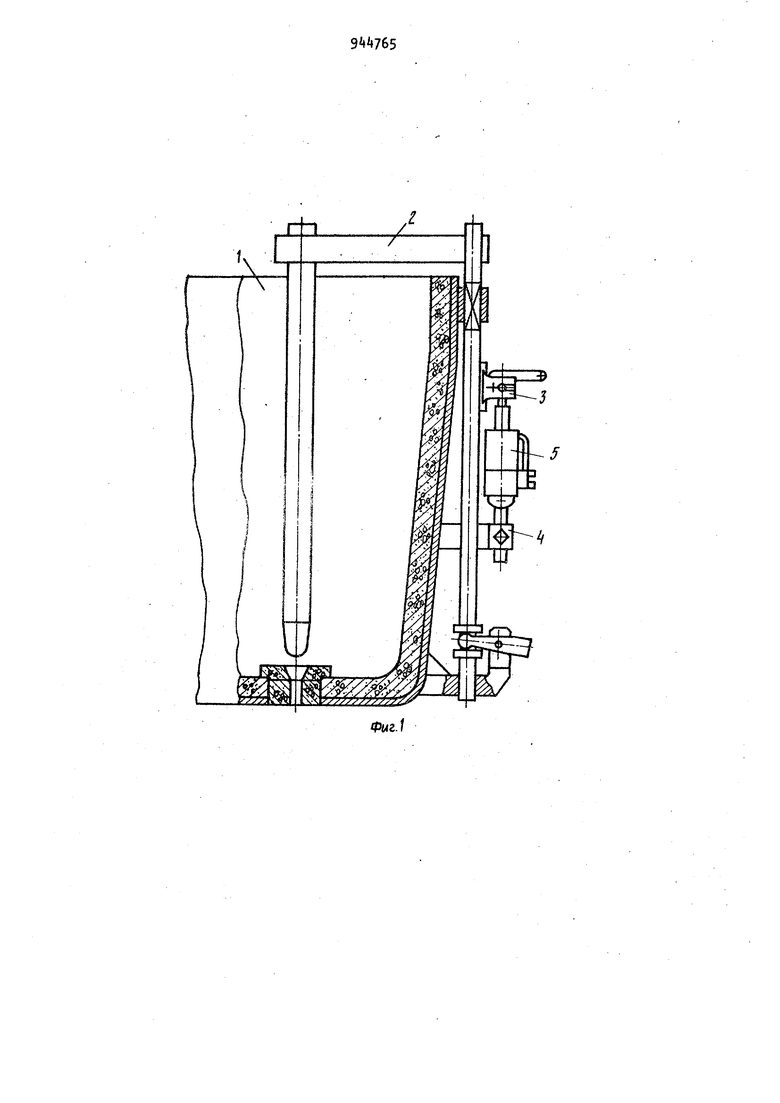
Изобретение относится к области непрерывной разливки металлов, в час ности к устройствам автоматизации процессов разливки стали при стопорном дозировании из металлургической емкости. Известен исполнительный механизм для управления стопором металлургической емко-сти содержащий корпус, поршень с силовым штоком, совершающим возвратно-поступательное движение, и механизм управления 1 . Недостатком этого устройства является низкая точность поддержания заданного положения стопора, связанная с отсутствием датчика положения, а также большие весогабаритные харак теристики, вызванные сложностью конструкции. Наиболее близким по технической сущности к изобрет.ению является исполнительный механизм с датчиком положения стопора металлургической емКОСТИ, содержащий корпус, силовой шток, совершающий возвратно-поступз тельное движение, механизм управления и датчик положения i2j. Недостаток известного устройства состоит в низкой надежности, связанной с использованием открытого исполнения измерительных элементов, и в низкой точности поддержания заданного положения стопора, связанной с применением механической передачи винт-гайка от силового штока до стопора и датчика положения, которая обладает большими люфтами и кинематическими погрешностями. Кроме того, , при соединении исполнительного механизма к стопору, а также в процессе работы происходит разворот силового штока, вызывающий изменение сигнала датчика положения и, следовательно, изменение положения стопора, приводящее к аварийной ситуации, в связи с чем понижается надежность работы. К тому же функциональная зависимость 39 показаний датчика положения от перемещения силового штока требует их совместного размещения, что приводит к увеличению габаритов и веса исполнительного механизма. Целью изобретения является повышение надежности, повышение точности поддержания заданного положения стопора, улучшение обслуживания, а также расширение функциональных возможностей датчика положения. Поставленная цель достигается тем, что в исполнительном механизме поддержания заданного положения стопора металлургической емкости, содержащем корпус, поршень с силовым штоком возвратно-поступательного дви жения, механизм управления и датчик положения, силовой шток поршня исполнительного механизма снабжен безлюфтовым функциональным преобразоват лем и безлюфтовым развязывающим шарикоподшипником, при этом безлюфтовый функциональный преобразователь связывает силовой шток с датчиком положения и соединен с силовым штоком через безлюфтовый развязывающий шарикоподшипник, причем датчик положения и безлюфтовый развязывающий шарикоподшипник размещены в полости поршня, а безлюфтовый функциональный преобразователь размещен в полости штока, при этом безлюфтовый функциональный преобразователь выполнен в виде валика с косыми шлицами и шариг ковой гайки, а угол подъема шлицев по всей длине валика выполнен в соот ветствии с законом изменения сигнала датчика положения. На фиг. 1 представлена металлурги ческая емкость; на фиг. 2 - исполнительный механизм. Исполнительный механизм присоеди нен к стопорному устройству 2 металлургической емкости 1 при помощи узлов верхнего 3 и нижнего Ц креплений. Исполнительный механизм 5 содержит корпус 6, в котором расположены механизм 7 управления,датчик 8 положения, поршень 9 и силовой шток 10, уплотненные манжетами 11. Полости нагнетания и слива исполнительного механизма 5 соединены с питающей установкой при помощи гидроразъемов 12. Обмотки управления датчика 8 положения и механизма 7 управления соединены через штепсельный разъем 1 с .системой управления. Силовой шток 10 соединен с датчиком 8 положения через безлнх1)товый функциональный преобразователь поступательного движения во вращательное, выполненный в виде валика 14 с косыми шлицами 15 и гайки 16, в корпусе которой расположены подпружиненные шарики 17 обеспечивающие контакт с косыми шлицами 15, а также подпружиненный шарик 18 для контакта с призматическим стержнем 19, жестко соединенным с корпусом 6. Корпус гайки 16 центрируется в полости поршня 9 посредством безлюфтового развязывающего шарикоподшипника, образованного радиально-упорным шарикоподшипником 20 с разъемным подпружиненным наружным кольцом. Датчик 8 положения жестко без люфта соединен с валиком , удерживаемым от осевого смещения радиально-,упорным шарикоподшипником 21 с разъемным и подпружиненным наружным кольцом. Исполнительнь|й механизм работает следующим образом. В процессе разливки требуемая подача металла в кристаллизатор осуществляется при определенном положении стопора, что соответствует заданному положению силового штока 10, который совершает в процессе работы возвратно-поступательное движение за счет изменения перепада давлений в полостях исполнительного механизма, осуществляемого механизмом 7 управления. Каждому положению силового штока 10 соответствует единственно возможное положение гайки 16, совершающей вместе с силовым штоком 10 возвратно-поступательное движение. При этом шарики 17, перемещающиеся в косых шлицах 15, придают валику , а вместе с ним и датчику 8 положения вращательное движение, приводящее к изменению сигнала на обмотках управления датчика 8 положения. В этом случае возникающие в процессе работы внешние воздействия, связанные с переустановкой исполнительного механизма 5 на емкость 1 и направленные на разворот силового штока 10, не влияют на показания датчика 8 положения, так как при этом гайка 16 удерживается от вращения посредством призматического стержня 19, а вместе с силовым штоком 10 вращается лишь наружное коль-. . . 5 цо развязывающего шарикоподшипника 20. Таким образом, каждому положению силового штока 10 соответствует определенное значение сигнала датчи ка 8 положения, функционально зависимое от угла подъема шлицев 15 по длине валика Н. Изменение угла нак на шлицев 15 позволяет в широких пределах изменять характеристики применяемых в качестве датчика поло жения 8 электрических приборов, линеаоизовывая их нелинейные хлоактеристики или наоборот, в зависимости от конкретных условий построе ния системы, преобразовать линейную хаоактеоистику в соответствии с желаемым зяконом изменения сигнала датчика положения. Конструкция предлаг мого исполнительного механизма с датчиком положения позволяет облегчить обслужи вание и повысить надежность работы за счет размещения измерительных элементов непосредственно в рабочей полости без изменения энергетических и габаритных характеристик и повысить при .этом точность поддержания заданного положения стопора.К тому же в изобретении исключено влияние внешних воздействий на показания датчика положения, направленных на разворот силового штока, что полностью устраняет возможность аварий ной ситуации при переустановке исполнительного механизма во время разливки и тем самым повышает надеж ность работы установки непрерывного литься заготовок. Применение указанного исполнител ного механизма позволяет поддерживать заданное положение стопора с точностью до О,2 мм и увеличить выход годного металла за счет сокращения аварийных ситуаций на 2-}%. 5 Формула изобретения 1.Исполнительный механизм поддержания заданного положения стопора металлургической емкости, содержащий корпус,поршень с силовым штоком возвратно-поступательного движения, механизм управления и датчик положения, отличающийся тем, что. Сцелью повышения надежности, точности поддержания заданного положения стопора и улучшения обслуживания, силовой шток поршня исполнительного механизма снабжен безлюфтовым функциональным преобразователем и безлюфтовым развязывающим шарикоподшипником, при этом безлюфтовый функциональный преобразователь связывает силовой шток с датчиком положения и соединен с силовым штоком через безлюфтовый развязывающий шари- . коподшипник, причем датчик положения и безлюфтовый развязывающий шарикоподшипник размещены в полости поршня, а безлюфтовый функциональный преобразователь размещен в полости штока. 2.Исполнительный механизм по п.1, отличающийся тем, что, с целью расширения функциональных возможностей датчика положения,- безлюфтовый функциональный преобразователь выполнен в виде валика с косыми шлицами и шариковой гайки,, причем угол подъема шлицев по всей длине валика выполнен в соответствии с законом изменения сигнала датчика положения. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР If /+i/t77, кл. В 22 О 39/00, 2.Патент Японии W 51-62, кл. ПВ091, 11С1, 1976.

| название | год | авторы | номер документа |
|---|---|---|---|
| РЕГУЛЯТОР РАСХОДА РАБОЧЕЙ СРЕДЫ ДЛЯ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 2009 |
|
RU2409828C2 |
| Способ регулирования уровня металлаВ КРиСТАллизАТОРЕ | 1979 |
|
SU829327A1 |
| Гидравлический исполнительный меха-НизМ для упРАВлЕНия СТОпОРОМ МЕТАл-луРгичЕСКОй ЕМКОСТи | 1979 |
|
SU846101A1 |
| Система поддержания уровней жидкого металла в двухручьевом кристаллизаторе установки непрерывной разливки стали | 1975 |
|
SU538813A1 |
| УСТАНОВКА ДЛЯ ОЦЕНКИ СОВМЕСТИМОСТИ ТОПЛИВ ДЛЯ РЕАКТИВНЫХ ДВИГАТЕЛЕЙ С РЕЗИНОЙ, ПРИМЕНЯЕМОЙ В ТОПЛИВНЫХ СИСТЕМАХ АВИАЦИОННЫХ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ | 2011 |
|
RU2475738C1 |
| Устройство автоматического регулированияуРОВНя МЕТАллА B КРиСТАллизАТОРЕ | 1979 |
|
SU850286A1 |
| Электромеханический исполнительный механизм для перемещения стопорного устройства | 1984 |
|
SU1234044A1 |
| Устройство для крепления механизма дистационного управления стопором разливочного ковша | 1980 |
|
SU933245A1 |
| Система поддрежания уровня металла в кристаллизаторе установки непрерыной разливки стали | 1976 |
|
SU603489A1 |
| Механизм разжима брусков хонинговального станка | 2015 |
|
RU2617186C2 |