.:,. J-V--- ;a, ; .
бесконтактные сельсины с роторами, жестко соединенные посредством редукторов с валами электроприводов механизма продольной подачи трубы, поворота трубы вокруг оси, установки гибочного механизма на заданный радиус, а также клавишный переключатель выбора технологических команд гибки, соединенный со статорами бесконтактных сельсинов и блоком управления электроприводов механизма продольной подачи, поворота трубы вокруг оси и установки гибочного механизма на заданный радиус.
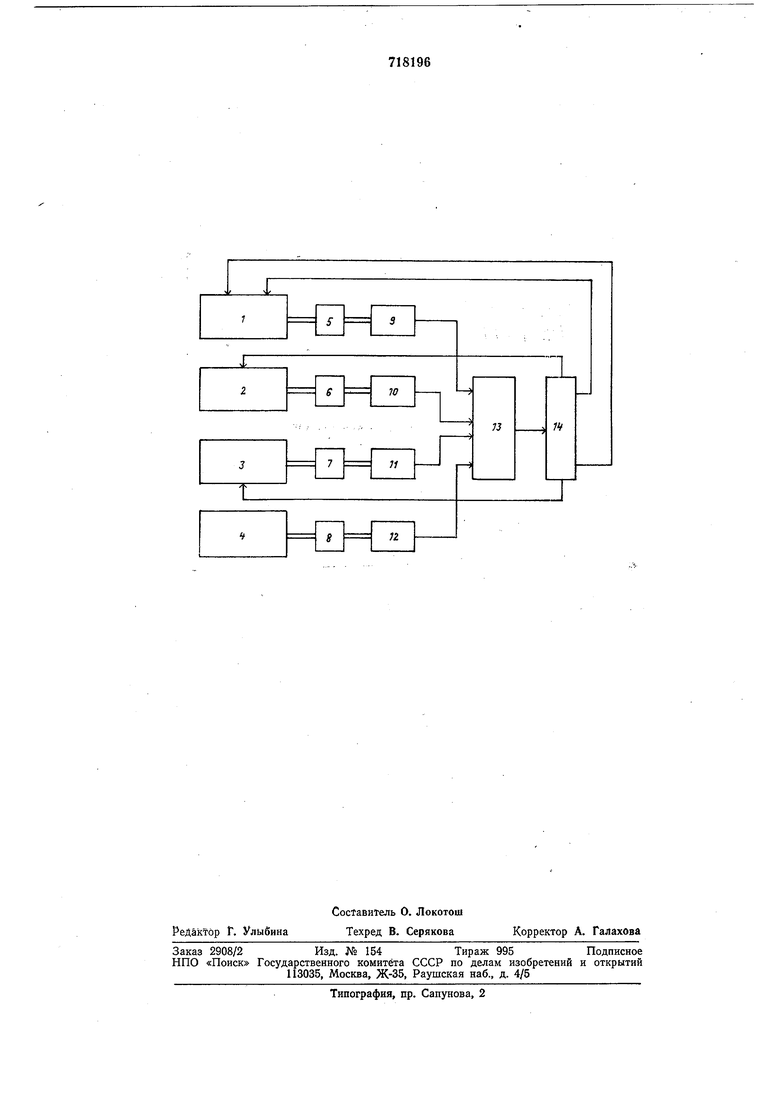
На чертеже представлена функциональная схема системы управления трубогибочным станком.
Система состоит из электропривода 1 механизма продольной подачи трубы, электропривода 2 механизма новорота трубы вокруг оси, электропривода 3 механизма установки гибочного механизма на заданный радиус, оси водила 4.
Каждый из перечисленных электроприводов и ось водила жестко соединены с редукторами, соответственно 5, 6, 7 и 8, выходные валы Которых жестко соединены с роторами сельсинов (датчиков), соответственно 9, 10, 11 и 12. Статоры сельсинов соединены через клавишный нереключатель 13 выбора технологических команд с блоком управления 14.
Перед началом работыклавишиым переключателем 13 задают необходимую технологическую операцию, например перемещение трубы на заданное расстояние. На блоке управления 14 набирают число-координату необходимого перемеш,ения трубы и вводят в регистр памяти. После этого включают электропривод 1 продольной подачи, который через редуктор 5 вращает ротор сельсина 9. В статоре выходной обмотки сельсина 9 формируются импульсы и через переключатель 13 поступают в блок управления 14. Информационным признаком контролируемого перемещения является разность фаз измерительного сигнала, поступающего с выходной обмотки сельсина 9 и опорного сигнала с той же частотой следования, формируемого в счетчике импульсов блока управления 14. При отработке нрограммы блок управления 14 выдает команду на отключение нривода 1.
-Операции поворота трубы вокруг оси и перемещения гибочного механизма на заданный радиус выполняются аналогично.
Операция выполнения гибки трубы на заданный угол несколько отличается от выше приведенных.
V Ik
718196
После нанесения соответствующей клавиши переключателя 13 на выполнение операции гибки, набора соответствующего числакоординаты на блоке управления 14 и ввода его в регистр, включают электропривод 1 продольной подачи. Так как труба зажата тисками каретки продольной подачи, начинает поворачиваться водило, которое через редуктор 8 начнет вращать ротор сельсина 12. Выходной сигнал обмотки сельсина 12 через переключатель 13 поступает в блок управления 14. После отработки программы блок управления 14 выдает команду на отключение привода 1.
Использование предлагаемой системы управления трубогибочным станком по сравнению с существующими системами обеспечивает упрощение управления станком, повышение надежности, возможность выполнения технологических операций гибки (перемещения трубы, поворота трубы вокруг оси, установки радиуса прогиба и гибки на заданный угол) по программе без применения шаблонов.
Экономический эффект от использования системы на одном станке составит 7,0 тыс. руб.
Формула изобретения
Система управления трубогибочным станком с индукционным нагревом, содержащая имеющий общий блок управления, электроприводы механизма продольной подачи трубы, механизма поворота трубы вокруг оси, механизма установки гибочного механизма на заданный радиус, связанного с осью водила, отличающаяся тем, что, с целью обеспечения бесшаблонной гибки труб по заданной программе, в нее введены бесконтактные сельсины с роторами, жестко соединенными посредством редукторов с валами электроприводов механизма продольной подачи трубы, поворота трубы вокруг оси, установки гибочного механизма на заданный радиус, а также клавишный переключатель выбора технологических команд гибки, соединенный со статорами бесконтактных сельсинов и с блоком управления электроприводов механизма продольной подачи, поворота трубы вокруг оси и установки гибочиого механизма на заданный радиус. Источники информации,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 493273, кл. В 21D 7/12, G 05В 19/02, 1976.
2.Авторское свидетельство СССР Яо 271267, кл. В 21D 7/00, 1963.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления трубогибочным станом | 1987 |
|
SU1505624A1 |
| ТРУБОГИБОЧНЫЙ СТАНОК | 2019 |
|
RU2708488C1 |
| ТРУБОГИБОЧНЫЙ СТАНОК | 1987 |
|
SU1429414A1 |
| СТАНОК ДЛЯ ОБРАБОТКИ ТРУБ В КОМПЛЕКТЕ С ПРИБОРОМ ДЛЯ ОБНАРУЖЕНИЯ СМЕЩЕНИЯ ТРУБЫ | 2019 |
|
RU2798137C2 |
| СПОСОБ ГИБКИ ТРУБ И СТАНОК ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2015 |
|
RU2614975C1 |
| СТАНОК ДЛЯ ГИБКИ ТРУБ | 2019 |
|
RU2772761C2 |
| Станок для гибки труб | 1983 |
|
SU1171144A1 |
| Способ гибки труб и станок для осуществления способа | 2018 |
|
RU2713899C2 |
| УСТРОЙСТВО ДЛЯ ГИБКИ ТРУБ | 2010 |
|
RU2434703C1 |
| СПОСОБ ГИБКИ ТРУБ И СТАНОК ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2010 |
|
RU2422229C1 |