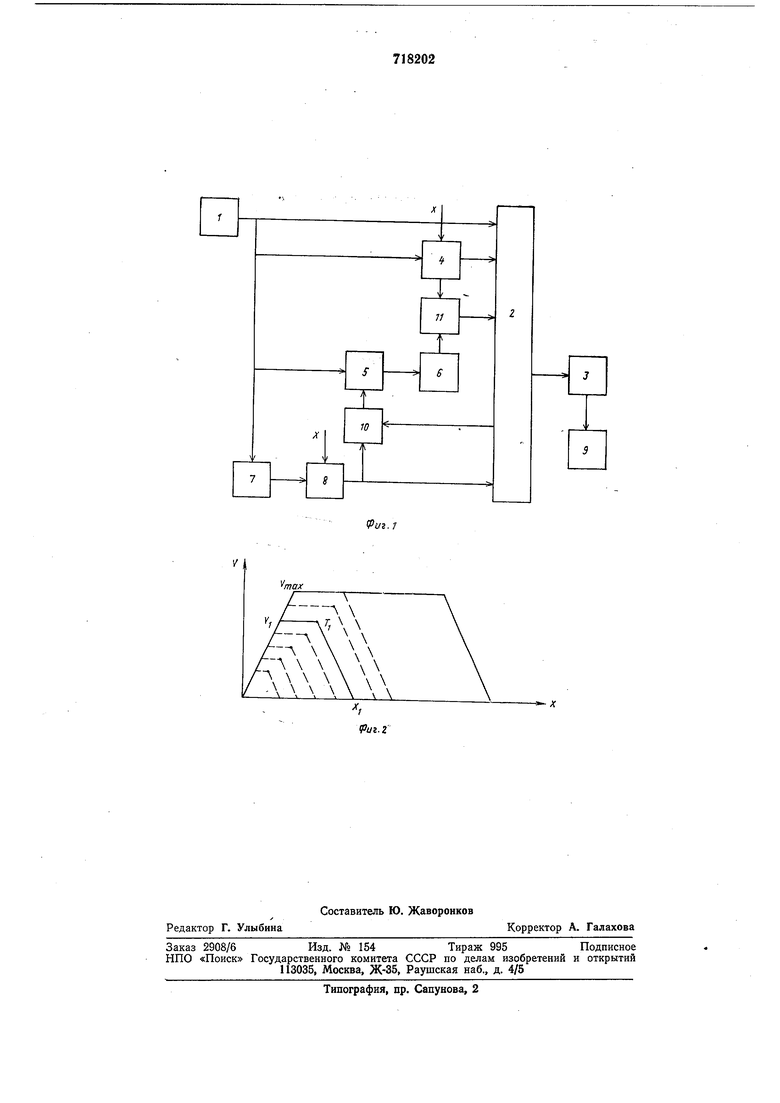
ступают на привод 3 подачи, осуществляя его разгон.
Одновременно импульсы поступают на вход задатчика 4 длины пути, проходимого подающим органом, в который занесена величина подачи X. Задатчик длины пути работает в режиме вычитания импульсов и на выходе всегда имеет число, соответствующее оставшемуся пути.
Импульсы поступают также в клапан 5 и из него на вход счетчика 6 схемы длины пути, проходимого подающим органом, работающего в режиме сложения импульсов.
Кроме того, импульсы с генератора 1 поступают на вход умножителя 7, который при каждом входном импульсе выдает на вход задатчика 8 длины пути проходимого подающим органом, п импульсов, например три импульса. Задатчик 8 длины пути, проходимого подающим органом, работает в режиме вычитания, в задатчик длины пути предварительно заносится величина подачи X. Поскольку в задатчик длины пути поступает в п раз больше импульсов, чем па вход привода подачи, записанное в задатчике длины пути число, равное величине подачи X, вычитается до нуля (например, равно 1/3 части величины подачи X).
Этот момент является моментом прекращения процесса разгона привода 3 подачи и начала работы его на той скорости, которой он достигает (точка Vi иа фиг. 2) сигнал с выхода задатчика 8 длины пути, пройдя схему ИЛИ 10, закрывает клапаи 5 и выдает в блок 2 управления команду на прекращение разгона привода подачи. В счетчике 6 длины пути в этот момент будет записано число импульсов, соответствующее пути разгона.
Подача материала продолжается на установившейся скорости до момента, когда в задатчнке 4 длины пути не останется число, равное записываемому в счетчике 6 длины пути.
В момент сравнения числа в задатчике 4 длины пути счетчика 6 длины с выхода схемы 11 совпадения в блок 2 управления поступает сигнал на начало торможения привода 3 подачи (точка Ti на фиг. 2). Происходит торможеиие привода подачи
3, а момент полного вычитания числа X из задатчика 4 длины пути 4 в блок 2 управления подается сигнал на отключение привода подачи (точка Xi на фиг. 2). Если заданная величина X больше, чем
п участков пути разгона, то клапан 5 закрывается раньше, чем исполнительный механизм 9 пройдет /г-ную часть пути. Клапан 5 закрывается сигналом по второму входу схемы ИЛИ 10 с блока управления в момент вывода привода подачи на максимальную скорость подачи (точка Ушах иа фиг. 2).
Формула изобретения
Система управления приводом подающего
органа, содержащая блок управления, связанный с приводом, генератор импульсов, связанный через клапан, счетчик длины пути, проходимого подающим органом, и систему сравнения с блоком управления, задатчик длины пути, проходимого подающим органом, связанным с блоком управления и со схемой сравнения, отличающееся тем, что, с целью повышения плавности работы привода, система управления снабжеиа схемой ИЛИ, связанной с блоком управления и с клапаном, дополнительным задатчиком длины пути, проходимого подающего органом, умножителем импульсов, связанным с генератором импульсов и через дополнительный задатчик длины пути, проходимого подающим органом, со схемой ИЛИ и с блоком управления, причем задатчик длины пути проходимого подающего органом, связанс генератором импульсов.
Источники информации,
принятые во внимание при экспертизе 1. Макеев Б. А. и др. Автоматизированная установка для комбинированного раскроя листьев УКР-0. «Кузнечно-штамповочное производство, 1973, № 4, с. 36-39, рис. 5 (прототип).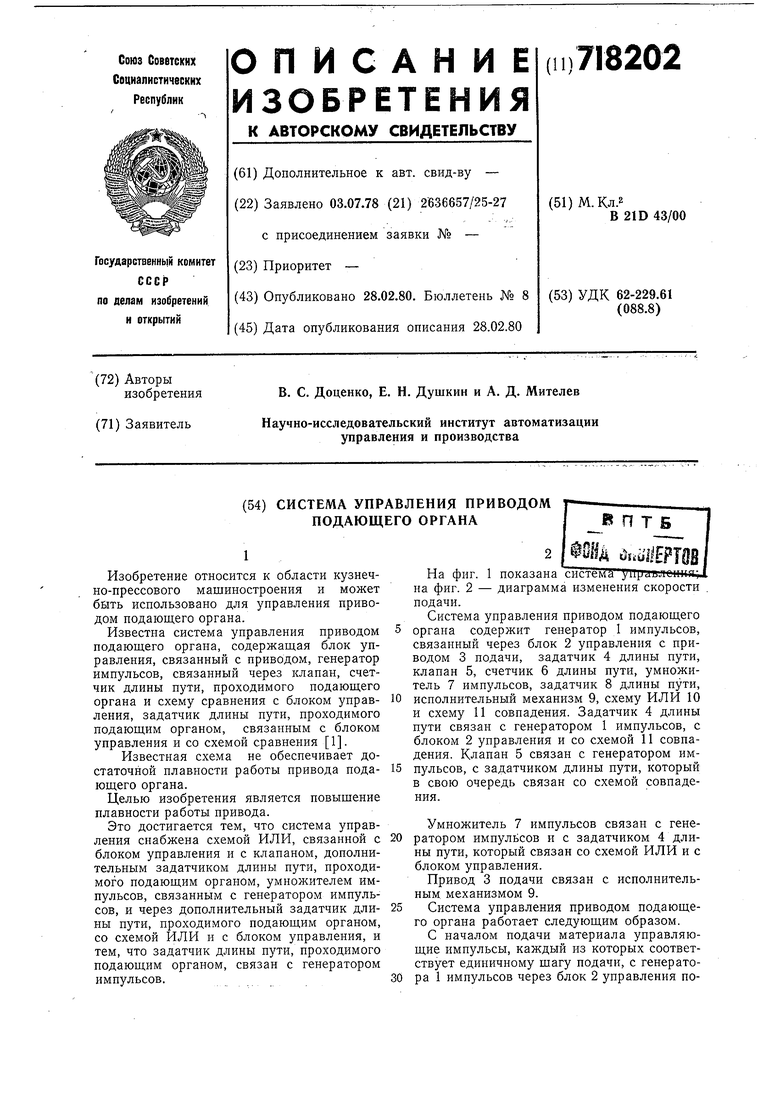

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для кинематического дробления стружки на токарных станках с числовым программным управлением | 1981 |
|
SU1004974A1 |
| Автоматизированная система управления подачей материала в зону обработки | 1987 |
|
SU1502151A1 |
| Устройство позиционирования | 1979 |
|
SU798722A1 |
| Устройство для позиционного програмного управления | 1975 |
|
SU550622A1 |
| Устройство для управления перемоточным станком | 1982 |
|
SU1087594A1 |
| Система позиционирования с двухзонным регулированием скорости электропривода | 1991 |
|
SU1798765A1 |
| Устройство для управления летучими ножницами сортопрокатных и трубных станов | 1974 |
|
SU546439A1 |
| Устройство для управления летучими ножницами | 1981 |
|
SU1004020A1 |
| Система для управления станом с порезкой проката на ходу | 1975 |
|
SU545401A1 |
| Самонастраивающаяся следящая система | 1973 |
|
SU570881A1 |