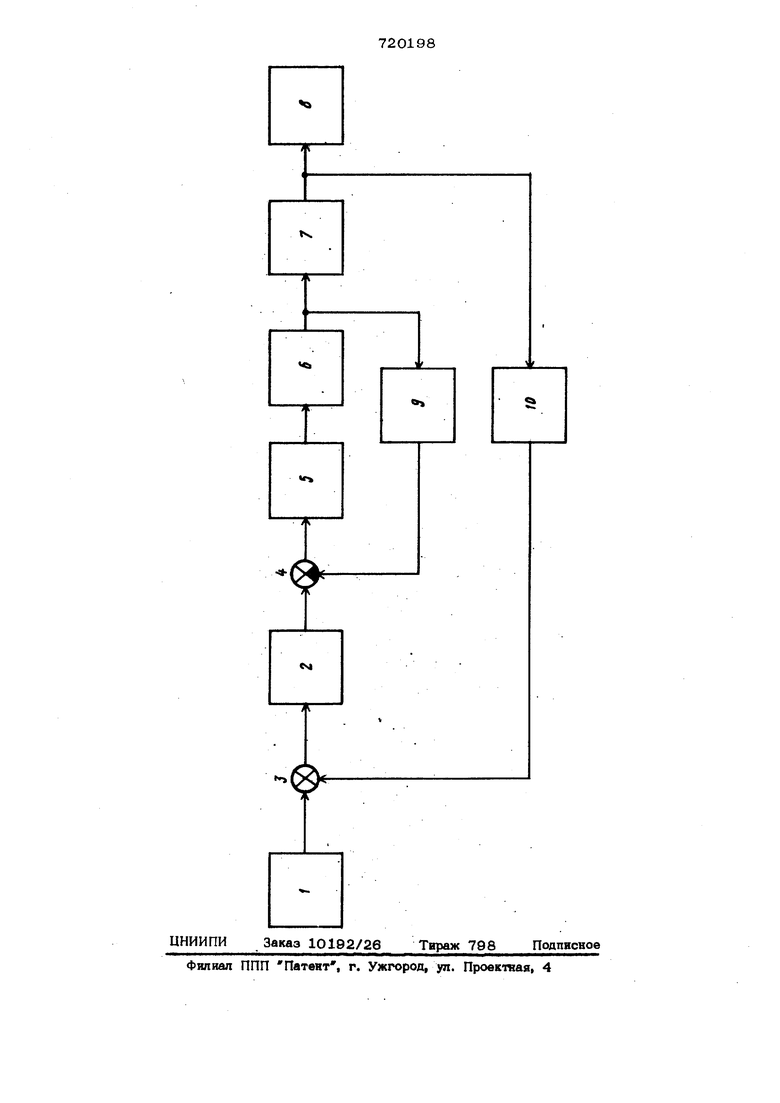
Электрогидравлический следящий привод работает следующим образом. В зависимости от величины и зкшса рассогласования между действительным положением рабочего органа 8 и заданным положением появляется соответствующее напряжение на выходе фазочувствительного усилителя 2, которое сравнивается на выходе сравнивающего устройства 4 с напряжением датчика 9 у гла, величина и знак которого определяют ся положением .золотника гидроусили1:«ля 7, и, следовательно, скоростью штока гидроуснотителя. При достаточно большом рассопиасова НИИ на входе усилителя 2 его быходное напр51жение остается постоянным и равны напряжению датчика 9 угла, соответству ющему наибольшему перемещению ;золот- ника и максимальной скорости щтока гид роусилителя 7. При наличии рассогласования на выхо де сравнивающего устройства 4 С1:)абатывает пороговое устройство 5 к включается двигатель 6. Двигатель 6 перемещает золотник гидроусилителя 7, при QTOM шток гидроусилителя ненинает пер€ мещат ся с возрастающей скоростью. Как только напряжение датчика угла сравняется с напряжением, соответствующим максимальной скорости штока гидроусилителя, двигатель останавливается и шток гидроусилителя будет перемещаться с постоянной скоростью. При уменьшении рассогласования на входе усилителя 2 появляется рассоглас вание обратного знака на входе сравнива ющего устройства 4. Вновь срабатывает пороговое устройство 5, и двигат ыиь 6 начинает вращаться в обратном направлении. При этом скорость перемещения штока гидроусилителя 7 уменьшается., и в согласованном положении становится равной нулю. При этом двигатель 6 также останавливается, оставляя золотник гидроусилителя 7 в среднем положении, при котором каналы гидроусилителя перекрыты. Таким образом, в данном следящем приводе рассогласование, в зависимости от его величины, отрабатывается либо по треугольнику, либо по трапецеидальному графику скорости, что обеспечивает высокое быстродействие. При этом быстродействие может быть увеличено за счет уменьшения максимального перемещения золотника гидроусилителя 7, а также за счет увеличения скорости двигателя 6. Учитывая, что скорость штока гидроусилителя 7 в согласованном положении равна нулю, то погрешность отработки заданного рассогласования при выборе соответствующих датчиков будет иметь незначител|5ную величину. Применение данного изобретения позволит увеличить быстродействие и точность систем I управления перемещением рабочих органов прсмьшшенных тракторов и других механизмов. Формула изобретения Электрогидравлический следящий привод, содержащий гидроусилитель, выход кинематически связан с рабочим органом и датчиком перемещения рабочего органа, фааочувствительный усилитель, подключенный к выходу суммирующего устройства, один вход которого подключен к задающему устройству, а другой к выходу датчика перам ещения рабочего органа, отличающийся тем, что, с целью повышения быстродействия и точности, привод снабжен фазочувствительным порогхжым устройством, двигателем постоянного тока, датчиком угла и сравнивающим устройством, причем один вход последнего подключен к выходу фа- зочувствительного усилителя, другой к выходу датчика угла, а выход - к входу порогового устройства, выход которого подсоединен к двигателю постоянного тока, имеющему вал, кинематически связанный с датчиком угла и с входом гидроусилителя. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР М( 185484, кл. В 27 В 5/36, 1962.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлическая следящая система | 1979 |
|
SU875334A1 |
| Электрогидравлический следящий привод | 1977 |
|
SU732805A1 |
| Электрогидравлический следящий привод | 1982 |
|
SU1049863A2 |
| Электрогидравлический следящий привод | 1978 |
|
SU802918A1 |
| Электрогидравлический следящий при-ВОд | 1979 |
|
SU798709A1 |
| Электрогидравлический следящий привод | 1979 |
|
SU930231A1 |
| Электрогидравлический следящий привод | 1977 |
|
SU732802A1 |
| Электрогидравлический следящий привод | 1979 |
|
SU901669A1 |
| Электрогидравлический следящий привод | 1977 |
|
SU652530A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |