(54) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Автономный мобильный модуль роботизированного хирургического инструмента | 2019 |
|
RU2715684C1 |
| Исполнительный орган манипулятора | 1975 |
|
SU541662A2 |
| Манипулятор роботизированного хирургического комплекса | 2020 |
|
RU2754219C1 |
| Ведущий манипулятор роботохирургического комплекса | 2022 |
|
RU2803231C1 |
| СВАРОЧНАЯ ГОЛОВКА | 1990 |
|
RU2048281C1 |
| ШАРНИР МАНИПУЛЯТОРА С РЕГУЛИРУЕМОЙ БЕЗЗАЗОРНОЙ ЗУБЧАТОЙ ПЕРЕДАЧЕЙ (ВАРИАНТЫ) | 2012 |
|
RU2497658C1 |
| УСТАНОВКА ДЛЯ УПРОЧНЕНИЯ ИНДУКЦИОННОЙ НАПЛАВКОЙ | 1999 |
|
RU2154562C1 |
| Устройство управления манипуляторами роботохирургического комплекса | 2020 |
|
RU2757969C1 |
| ПРИВОД ДЛЯ ИНСТРУМЕНТА ЭНДОСКОПИЧЕСКОГО ХИРУРГИЧЕСКОГО АППАРАТА | 2014 |
|
RU2570939C1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
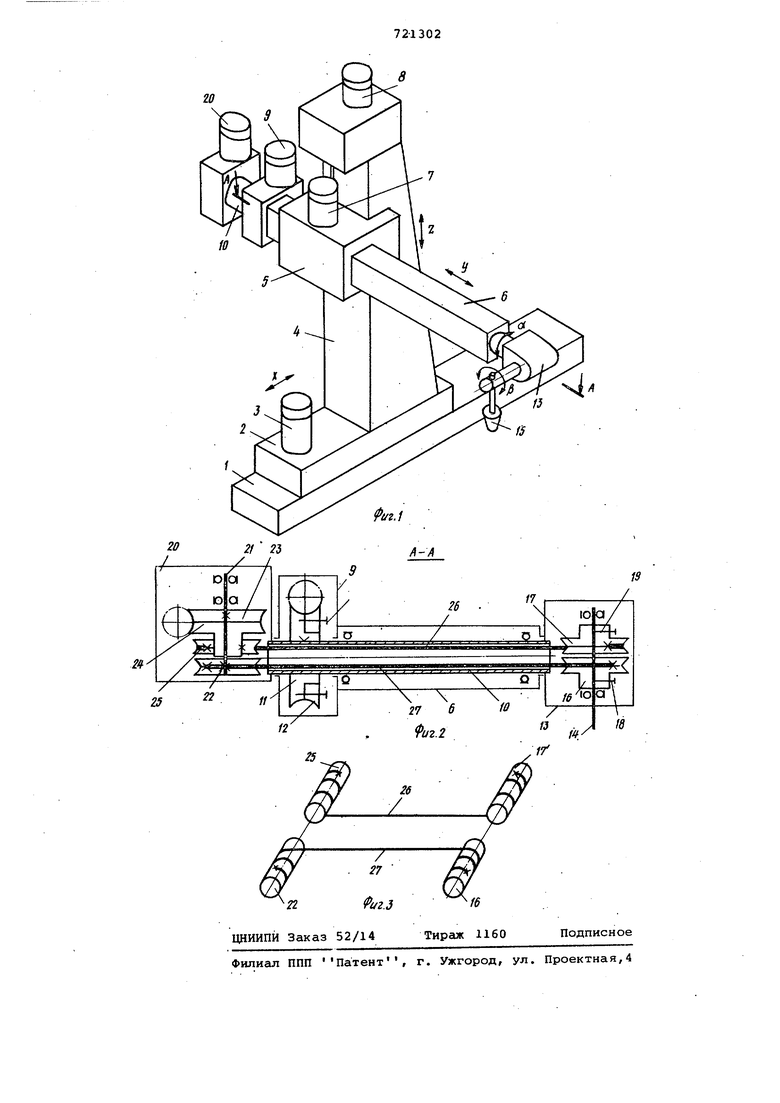
Изобретение относится к области сварки, а именно к устройствам для перемещения сварочного инструмента из одной точки в другую или вдоль заданной линии. Известен манипулятор, содержащий консоль с кистью (исполнительным инструментом) и привода поворота кисти относительно двух взаи но перпендикулярных осей 1. Однако приводы поворота содержат гидроцилиндры,многоступенчатые кине матические цепи/ состоящие из цепны и зубчатых передач, включающих планетарные редукторьг, наличие которых усложняет конструкцию, снижает динамические свойства и надежность, кроме того, при повороте кисти вокр одной из осей: происходит и поворот относительно другой оси, что усложняет наладку манипулятора. Наиболее близким техническим решением к изобретению является манип лятор, содержащий поворотную консол со смонтированными на ней исполнительным инструментом, сидящим на ва лу, перпендикулярным продольной оси консоли и снабженным ведомым блоком и приводом поворота вала, на выходном валу которого установлена шестерня и жестко закреплен ведущий блок, соединенный тросом с ведомым блоком 2. Однако такой манипулятор не обес печивает необходимой точности поворота исполнительного инструмента (сварочной головки). Целью изобретения является повышение точности поворота исполнительного инструмента путем обеспечения выборки зазоров в зацеплении шестерни привода его поворота. С этой целью шестерня выходного вала привода поворота выполнена разрезной, одна из ее частей закреплена на выходном валу жестко, а другая установлена на упомянутом валу с возможностью фиксированного поворота и снабжена закрепленным на ее ступице дополнительным ведущим блоком, при этом на валу исполнительного инструмента смонтирован дополнительный ведомый блок, соединенный с дополни тельным ведущим блоком тросом, иаправлениенамотки которого противоположно направлению намотки троса, соединяющего ведущий и ведомый блоки. На фиг. 1 изображен предлагаемый манипулятор, общий вид; на фиг. 2 сечение А-А на фиг. 1; на фиг, 3 схема намотки тросов на блоки.
Манипулято содержит станину 1, каретку 2 с приводом 3 ее перемещения вдоль координаты X, колонну 4 с кареткой 5, в которой установJl Ka консоль 6, привод 7 перемещехния консоли 6 вдоль координаты У и привод 8 подъема каретки 5 вдоль координаты Z .
На консоли 6 установлен привод 9 поворота полого вала 10 консоли на угол . , выходная червячная шестерня которого выполнена разрезной, часть 11 которой жестко закреплена на полом валу 10, а часть 12 установлена с возможностью .поворота и фиксации относительно части 11.
На свободном конце консоли б установлен корпус 13 с перпендикулярным оси консоли поворотным валом 14, несущим исполнительный инструмент (сварочную головку 15), ведомый блок 16 и дополнительный ведомый блок 17, фиксируемыена валу 14 нажимными винтами 18 и 19.
Консоль 6 оснащена также приводо 20 поворота вала 14 сварочной голов ки 15. На выходном валу 21 этого пр вода установлены ведущий блок 22 и разрезная шестерня, одна из ее частей 23 жестко закреплена на выходном валу 21 и другая часть 24 установлена с возможностью фиксированного поворота относительно части 23 . и снабжена закрепленным на ее ступице, дополнительным ведущим блоком 25.
Ведущий блок 22 и дополнительный ведущий блок 25 соединены с соответтвующими им ведомым блоком 16 и дополнительным ведомым блоком 17 тросами 26 и 27, причем направление намотки одного из них противоположн направлению намотки другого.
Манипулятор работает следующим образом.
Для поворота сварочной головки 15на угол л включается привод 9, вследствие чего происходит поворот вала 10 с корпусом 13 и приводом 20
Для увеличения точности поворота сварочной головки на угол Д. производят выборку зазоров, в червячной передаче, производя разворот части 12 относительно части 11 и взаимно фиксируя эти части винтами.
Для Поворота сварочной головки 1 на угсз; /3 включается привод 20, который посредством тросов 26 и 27 производит поворот сварочной головки.
Для увеличения точности поворота сварочной головки на угол производят выборку зазоров в зацеплении
червячной передачи привода 20, для чего ведуЕций блок 22 и дополнительный ведущий блок 24 поворачивают в противоположных направлениях до упора зубьев частей 23 и 24 шастерни выходного вала, 21 в витки червяка, затем, натягивая тросы 26 и 27, фиксируют винтами 18 и 19 ведомые блоки 6 и 17.на валу 14.
Таким образом, предлагаемое устройство имеет простую конструкцию, так как имеет йалое число ступеней в кинематической цепи поворота сварочной головки на угол р , кроме того, манипулятор обеспечивает необходимую точность поворота сварочно головки благодаря выборке зазора в последних ступенях зубчатых кинематических цепей без специальных устройств целевого назначения для выборки этих зазоров.
Предлагаемый манипулятор имеет также более высокие динамические свайства, так как сокращает длину ; кинематической цепи и снижает массу манипулятора за счет ликвидации зубчатой кинематической цепи, расположенной на свободном конце консоли.
Формула изобретения Манипулятор, .преимущественно для сварки, содержащий поворотную консоль со смонтированными на ней исполнительным инструментом, сидящим на валу, перпендикулярным продольной оси консоли и снабженным ведомым блоком и приводом поворота вала, на выходном валу которого установлена шестерня и жестко закреплен ведущий блок, соединенный тросом с ведомым блоком, отличающийс я тем, что, с целью повышения точности поворота исполнительного инструмента путем обеспечения выборки зазоров в зацеплении шестерни привода, шестерня .выходного вала привода поворота выполнена разрезной, одна из частей ее закреплена на выходном валу жестко, а другая установлена на упомянутом валу с возможностью фиксированного поворота и снажена закрепленным на ее ступице дополнительным ведущим блоком, при этом на валу исполнительного инструмта смонтирован дополнительный ведомый блок, соединенный с дополнительным ведущим блоком тросом, напра ление намотки которого противоположн направлению намотки троса, соединяющего ведущий и ведомый блоки.
Источники информации, принятые во внимание при экспертизе
476971, кл. В 25 3 1/02, 1973 (прототип) i.
