1
Изобретение относится к машиностроению, а именно к промышленным роботам и манипуляторам для автоматизации основных и вспомогателы1ых операций.
Известен модуль промышленного робота, содержащий силовой цилиндр, жесткий упор и задающие упоры, выполненные в виде гаек, расположенных на приводных ходовых винтах 1.
Однако такой модуль довольно сложен конструктивно и не обладает высокой экономичностью в связи с низким коэффициентом полезного действия.
Целью изобретения является упрощение конструкции и повышение экономичности.
Это достигается тем, что жесткий упор закреплен на щтоке цилиндра, ходовые винты задающих упоров смонтированы на корпусе этого цилиндра, а гайки связаны с жестким упором.
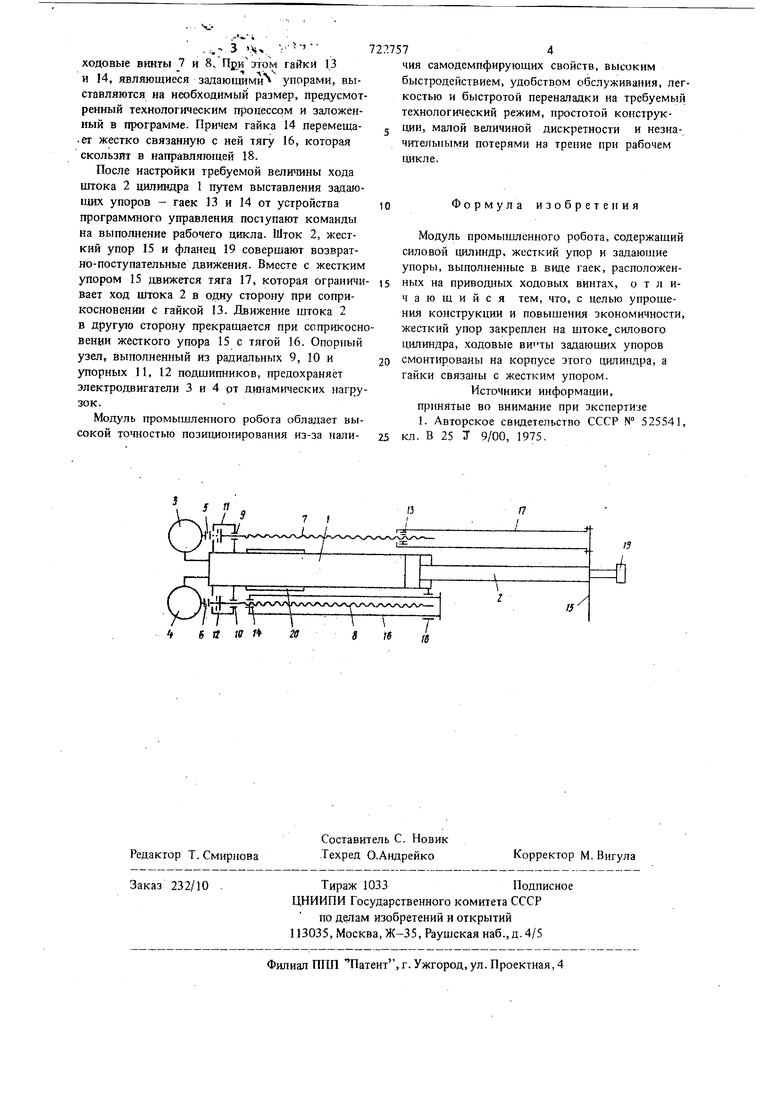
На чертеже дана принципиальная схема модуля промышленного робота.
Модуль промышленного робота состоит из силового цилиндра 1 со штоком 2. С цилиндром 1 жестко связаны двигатели 3 и 4, которые через разобщенные муфты 5 и 6 соединены с ходовыми винтами 7 и 8, смонтированными на корпусе цилиндра 1 в радиальных подшипниках 9 и 10 и упорных подшиш1иках 11 и 12. Задающие упоры выполнены в виде гаек 13 и 14, расположенных на приводных от двигателей 3 и 4 ходовых винтах 7 н 8 и связанных с жестким упором 15, закрепленным на штоке 2 циливдра 1 тягами 16 и 17. Гайка 13 установлена на тяге 17 с возможностью осевого перемещения, а сама тяга 17 жестко закреплена на упоре 15. Гайка 14 жестко соединена с тягой 16, которая установлена с возможностью осевого перемещения в направляющей 18. Шток 2 имеет присоединительный фланец 19, а корпус цшишдра - фланец 20.
Модуль промышленного робота работает следующим образом.
От устройства программного управления (на чертеже не показано) поступает сигнал настройки на двигатели 3 и 4, которые вращают связанные с ними посредством муфт 5 и 6 ...-.3 ходовые винты 7 и 8, При этом гайки 13 ,.- лЧ. И 14, являющиеся задающими упорами, выставляются на необходимый размер, предусмотренный технологическим процессом и заложенный в программе. гайка 14 перемеща.ег жестко связанную с ней тягу 16, которая скользят в направляющей 18. После настройки требуемой величины хода штока 2 циливдра I путем выставления задающих упоров - гаек 13 и 14 от устройства программного управления поступают команды на выполнение рабочего дикла. Шток 2, жесткий упор 15 и фланец 19 совершают возвратно-поступательные движения. Вместе с жестким упором 15 движется тяга 17, которая ограничивает ход штока 2 в одну сторону при соприкосновении с гайкой 13. Движение штока 2 в другую сторону прекращается при ссприкосно вении жесткого упора 15 с тягой 16. Опорный узел, выполненный из радиальных 9, 10 и упорных 11, 12 подшипников, предохраняет электродвигатели 3 и 4 от динамических нагрузок. Модуль промышленного робота обладает высокой точностью позиционирования из-за нали- 25 кл. 74 чин самодемпфирующих свойств, высоким быстродействием, удобством обслуживания, легкостью и быстротой переналадки на требуемый технологический режим, простотой конструкции, малой величиной дискретности и незначительными потерями на трение при рабочем цикле. Формула изобретения Модуль промышленного робота, содержащий силовой цилиндр, жесткий упор и задаюише упоры, выполненные в виде гаек, расположенных на приводных ходовых винтах, о т л ичающийся тем, что, с целью упрощения конструкции и повышения экономичности, жесткий упор закреплен на штоке, силового цилиндра, ходовые вичы задающих упоров смонтированы на корпусе этого цилиндра, а гайки связаны с жестким упором. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 525541, В 25 Т 9/00, 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль промышленного робота | 1986 |
|
SU1341016A1 |
| Промышленный робот | 1974 |
|
SU503711A1 |
| Модуль манипулятора | 1983 |
|
SU1134360A1 |
| УСТРОЙСТВО ДЛЯ СМЕНЫ ЗАДВИЖЕК ПОД ДАВЛЕНИЕМ | 2001 |
|
RU2201547C2 |
| Модуль промышленного робота | 1976 |
|
SU555006A1 |
| Модуль промышленного робота | 1975 |
|
SU525541A1 |
| Схват | 1983 |
|
SU1138313A1 |
| Модуль промышленного робота | 1982 |
|
SU1021598A1 |
| Модуль промышленного робота | 1981 |
|
SU1016154A1 |
| Устройство для отделения листовых заготовок от стопы | 1990 |
|
SU1761359A1 |
13
15
