(54) ДАТЧИК ЗАГРУЗКИ ДВИГАТЕЛЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик загрузки двигателя | 1978 |
|
SU723405A1 |
| Датчик загрузки двигателя | 1977 |
|
SU664060A1 |
| Устройство для контрля технического состояния двигателя | 1976 |
|
SU664061A1 |
| Датчик загрузки | 1965 |
|
SU744257A2 |
| ДАТЧИК ЗАГРУЗКИ | 1970 |
|
SU265503A1 |
| Система автоматического регулирования загрузки главной энергетической установки, шага регулируемого винта и скорости судна | 1987 |
|
SU1505844A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ РАБОТЫ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ, НАПРИМЕР СУДОВОГО ДИЗЕЛЯ | 1966 |
|
SU189184A1 |
| Двигатель внутреннего сгорания | 1985 |
|
SU1268770A1 |
| Гидравлический регулятор,например, для регулирования числа оборотов двигателей внутреннего сгорания | 1973 |
|
SU481883A1 |
| Система питания газодизеля | 2015 |
|
RU2617017C1 |
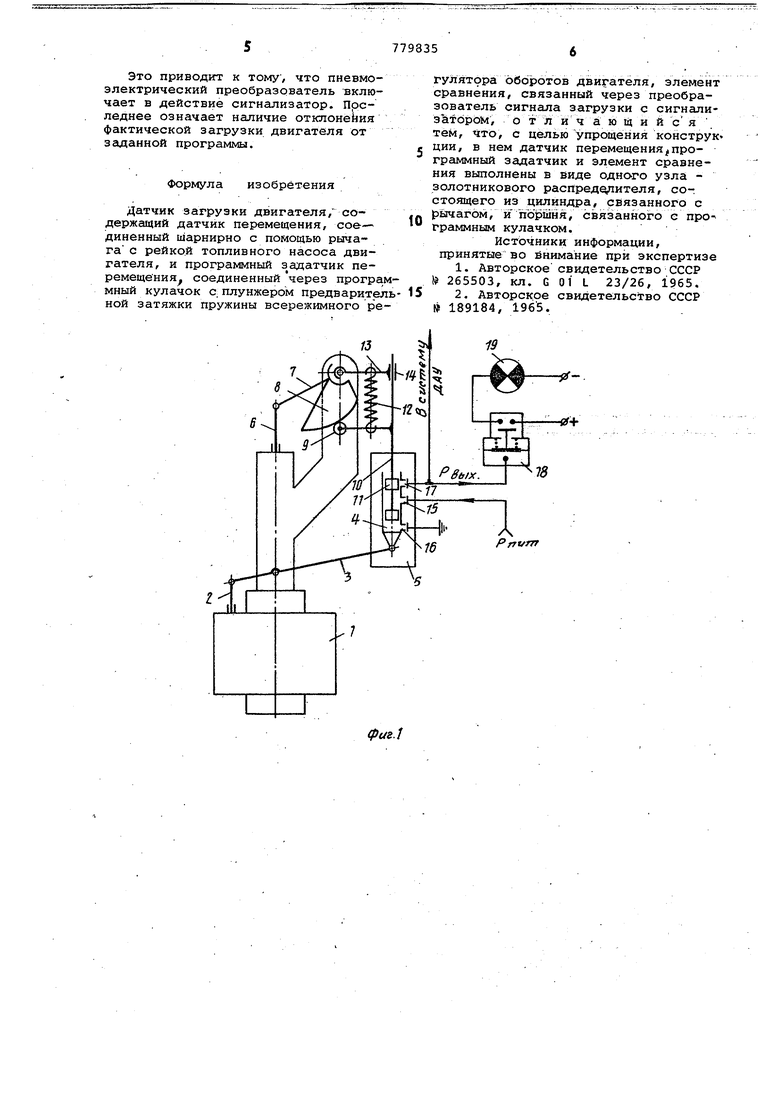
Датчик загрузки двигателя отнсу сится к области измерения парамет-. ров двигателя внутреннего сгорания, например дизеля. . Известен датчик загрузки двигателя, применяющийся в названной области, содержащий программный задатчик перемещения, кинематически шарнирно с помощью рычага и программного кулачка соединенный с плунжером предварительной затяжки пружины всережимного регулятора двигателя, и датчик перемещения, связанный с рей кой топливного насоса двигателя Jl. Недостатком указанного датчика загрузки является наличие в его сое-тане двух отдельных приборов, вырабатывающих два выходных пневматических давления, что усложняет его применение в системах дистанционного автоматического управления. Наиболее близКИМ.к изобретению по технической сущности является устрой ство для контроля работы двигателя внутреннего сгооаний, содержащее датчик перемещения, соединенный шар нирно с помощью рычага с рейкой топ ливного насоса двигателя, программный задатчик перемещения, соединенный через программный кулачок с плун жером предварительной затяжки пружины всережимного регулятора оборотов двигателя, и элемент сравнения, связанный через преобразователь сигнала загрузки с сигнализатором 2 J. Недостатком этого устройства является то, что не устраняется наличие в его составе трех отдельных приборов что усложняет конструкцию. Целью настоящего изобретения является упрсяцение конструкции датчика Указанная цель в датчике загрузки по настоящему изобретению достигается тем, что в нем датчик перемещения, программный задатчик и элемент сравнения выполнен в виде одного узла,- золотникового/распределителя, состоящего из цилиндра, связанного с рычагомJ- и поршня, связанного с программным кулачком. Датчик загрузки двигателя по настоящему изобретению преудставлен на чертеже, где: фиг. 1 - схема датчика загрузки, когда заданная программа загрузки двигателя имеет сложную форму, задаваемую специально спрофилированным программным кулачком;
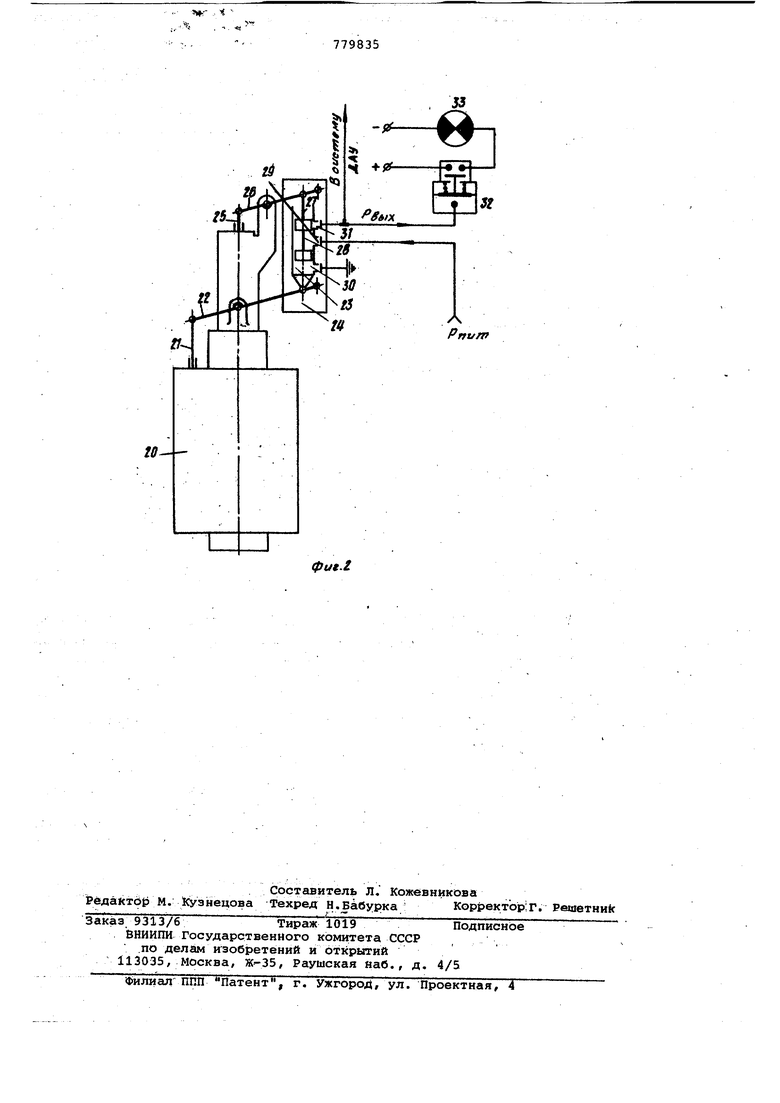
фиг. 2 - без применения программного кулачка.
Двигатель 1 имеет топливный насос рейка 2 которого рычагом 3 шарнирно соединена-с цилиндром 4 золотникового распределителя ,5, плунжер 6, служащий для изменения предварительной затяжки пружины всережимного регулятора оборотов двигателя, т. е..для изменения числа оборотов двигателя, кинематически шарнирно с по лощью управления 7, программного кулачка 8, жестко закрепленного на рычаге, ролик 9, ось которого закреплена на.штоке 10 поршня 11 золотникового распределителя. :
Ролик прижат к профильной части. программного кулачка пружиной растяжения 12, один конец которой закрелен на штоке, .а другой - на рычаге 13. Шток одним своим концом опирается на направляющую 14, жестко закрепленную на рычаге.
Входное окно 15 цилиндра соединено магистралью с источником рабоче среды, находящейся под давлением Pj,, а сливное окно 16 - с атмосферой или со сливом.
Выходное окно 17 цилиндра маги гралью соединено с входом (измерительной камерой) пневмоэлектрическог преобразователя 18, контакты которого включают электрическое питание сигнализатора 19. Выходное давление Pgbrt/ которое в зависимости от положения пояска поршня 11 относительно вйходного окна цилиндра 4 распределителя 5 -равно либо нулю, либо подведённого к распределителю, может быть использовано как в целях индикации, такИ в Системе дистанционного автоматического уп эавлёния .Связь плунжера регулятора с поршнем распределителя может быть осуществлена как с помощью кулачка (как показано на фиг. 1),так и без него (как показано на фиг. 2).
Для двигателя 20, имеющего программу загрузки достаточно простой, прямолинейной формы, схема датчика загрузки остается прежней.
Однако при этом подсоединение рейки 21 топливного насоса двигателя осуществляется шарнирно рычагом 22 к цилиндру 23 золотникового распределителя 24, а плунжер 25 предварительной затяжки всережимного регулятора оборотов без программного кулачка шарнирно рычагом 26 соедине Сштоком 27 поршня 28 золотникового распределителя 24, При этом входное окно 29 цилиндра 23 соединено магистралью с источником рабочей среды, сливное окно 30 - с атмосферой илй сосливом, а выходное окно 31 С входом Г ЕЗеЛё давления 32, :выход которого соединен с входом сигнали.забора 33.
Перемещение 5ц поршня распределителя является аналогичным сигналом, соответствукядим заданной программой величине загрузки двигателя (заданному значению хода рейки топливного насоса).
Перемещение S цилиндра распределителя является аналоговым сигналой, соответствующим фактической величине загрузки двигателя (фактической величине хода .рейки).
Соотношение/величин сигналов Sp и S определяют взаимное расположение поршня и цилиндра золотникового распределителя. Когда перемещение , и S равны между собой и напрдвлены в одну сторону, то есть S 5, поясок поршня находится точно против выходного окна цилиндра и перекрывает его, тогда 0, сигнализатор 19 (33) в действие не включен.
Когда перемещение S и S. равны между собой и направлены в пр тивоположные стороны, т. е. fy, sV, пом .ясок поршня занимает новое положение относительно выходного окна цилиндра, которое при этом внутренней полостью распределителя соединяетс.я с входным окном цилиндра, и выходное давление РВЫК становится равным РПИТ Тогда Рщ,, Pnv,y , сигнализатор 19 (33) включен в действие.
Предлагаемый датчик загрузки работает следующим образом.
ЕСЛИ точка, характеризующая режим работы двигателя в координатах Ход рейки, топливного насоса - обороты двигателя или в координатах Ход рейки топливного насоса - ход плунжера предварительной затяжки всережимного регулятора оборотов лежит на заданной двигателю программной зависимости загрузки от числа оборотов при изменении оборотов во всем возможном диапазоне, перемещения 5цИ , также изменяясь во всем возможном диапазоне, остаются равными друг другу по величине и направлению, то
ЕСТЬ 5„ S. ..
в этом случае поясок поршня нахо« дится точно против выходного окна золотникового распределителя, перекрывает его, и выходное давление зо лотникового распределителя равно нулю, Рьы)( 0.
Это приводит к тому, что пневматический преобразователь не включает в действие сигнализатор. Это означает, что .Отклонение фактической загрузки от.заданной,программной нет.
Если точка, характеризующая режим работы двигателя, лежит при.любых оборотах выше заданной программой, то S j S, Тогда поясок поршня меняет свое положение относительно выходного окна цилиндра и выходное давление становится равным питагёвдему давлению 5 то есть Рб( РПУ,-Г. Это приводит к тому , что пневмоэлектрический преобразователь включает в действие сигнализатор. Последнее означает наличие отклонения фактической загрузки двигателя от згщанной программы. Формула изобретения Датчик загрузки двигателя, содержащий датчик перемещения, сое- диненный шарнирно с помощью рычага с рейкой топливного насоса двигателя, и программный з адатчик перемещения соединенный через програ мный кулачок с, плунжером предварите ной затяжки пружины всережимного ре
8
/5
Prrvrrt гулятора оборотов двигателя, элемент сравнения, связанный через преобразователь сигнала загрузки с сигнализМорои, о т J7 и ч а ю щ и и с я тем, что, с целью упрощения конструк ции, в нем датчик перемещения программный задатчик и элемент сравнения выполнены в виде одного узла золотникового распредо;1ителя, состоящего из цилиндра, сйязанного с «ычагбм, и пЬрйня, связанного с про граммным кулачком. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР ( 265503, кл. G 01 L 23/26, 1965. 2.Авторское свидетельство СССР 189184, 19б5.
го
