(54) ДАТЧИК ЗАГРУЗКИ ДВИГАТЕЛЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик загрузки двигателя | 1978 |
|
SU723405A1 |
| Датчик загрузки | 1965 |
|
SU744257A2 |
| Датчик загрузки двигателя | 1978 |
|
SU779835A1 |
| Устройство для контрля технического состояния двигателя | 1976 |
|
SU664061A1 |
| ДАТЧИК ЗАГРУЗКИ | 1970 |
|
SU265503A1 |
| Система автоматического регулирования загрузки главной энергетической установки, шага регулируемого винта и скорости судна | 1987 |
|
SU1505844A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ РАБОТЫ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ, НАПРИМЕР СУДОВОГО ДИЗЕЛЯ | 1966 |
|
SU189184A1 |
| Устройство для автоматического управления трансмиссией трактора | 1959 |
|
SU125147A1 |
| ПНЕВМАТИЧЕСКОЕ VCTPOfiCTBO ДЛЯ ДИСТАНЦИОННОГО | 1969 |
|
SU236898A1 |
| Система топливоподачи четырехтактного газового двигателя | 1979 |
|
SU787707A1 |
I
Изобретение относится к измерению параметров двигателя внутреннего сгорания, например дизеля,и может быть использовано в судовых, силовых, дизельных установках, вспомогательных дизельных установках, а также в других энергетических установках, загрузка которых по тем или иным причинам должна осуществляться по ранее назначенной программе в функции от оборотов двигателя или от величины управляющего пневматического сигнала, поступающего на вход всережимного регулятора оборотов двигателя.
Известный датчик загрузки двигателя, содержащий регулятор оборотов, датчик и задающее устройство, не обеспечивает требуемой точности измерения загрузки двигателя 1.
Наиболее близким по технической сущности к предлагаемому является датчик загрузки двигателя, содержащий всережимный регулятор числа оборотов, рычаг управления рейкой топливного насоса, с которым соединен тягой программ ши кулачок 2.
Недостатком известного датчика является низкая точность измерения загрузки двигателя.
Цель изобретения - повыщение точности измерения загрузки двигателя.
Для этого в предлагаемый датчик введен пневматический сумматор с толкателем, пневматический вход которого соединен с пневматическим входом всережимного регулятора числа оборотов, причем программный кулачок связан с толкателем пневматического сумматора.
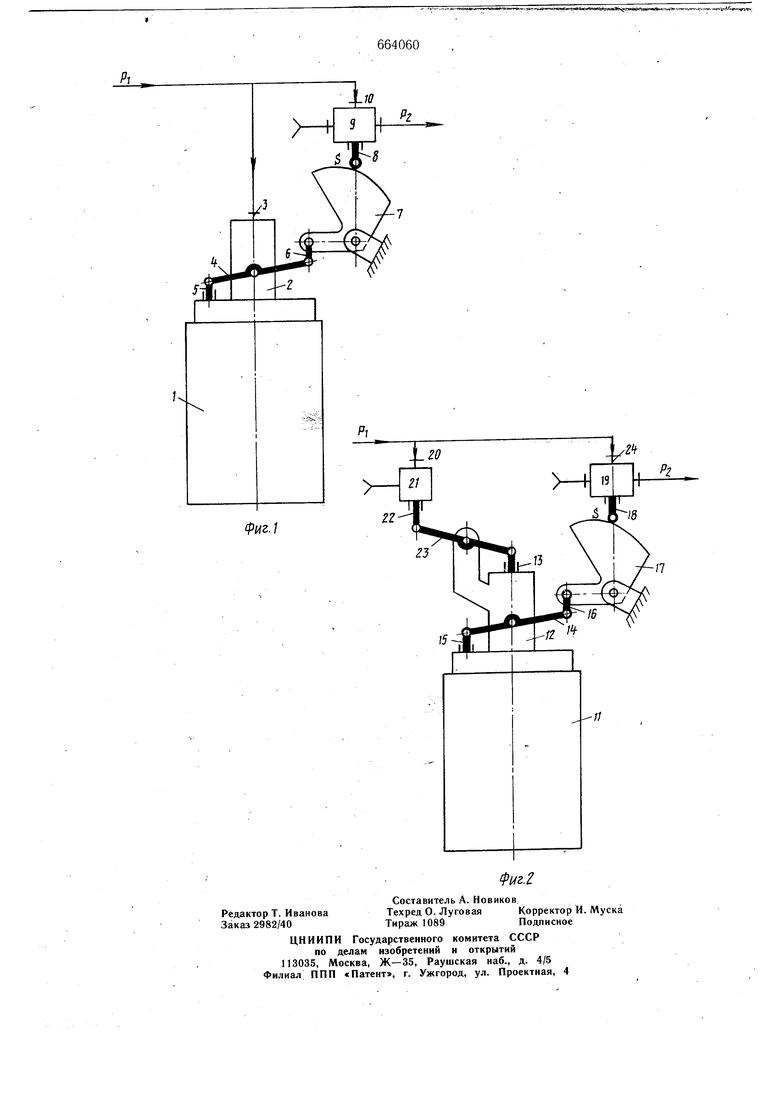
На фиг. 1 схематично изображен предлагаемый датчик загрузки двигателя с использованием управляющего пневматического сигнала, поступающего на вход всережимного регулятора оборотов двигателя; на фиг. 2 - то же, с использованием управляющего пневматического сигнала, поступающего на вход следящего исполнительного механизма дистанционной настройки всережимного регулятора оборотов двигателя.
Двигатель 1 имеет всережимный регулятор числа оборотов 2, снабженный пневматическим входом 3, предназначенным для задания числа оборотов двигателя.
Рычаг 4 управления рейкой 5 топливного насоса двигателя соединен тягой 6 с программным кулачком 7, воздействующим на толкатель 8 пневматического сумматора 9. Управляющий аналоговый пневматический сигнал Р, подаваемый на пневматический вход 3 всережимного регулятора 2, подведен также к пневматическому входу 10 сумматора 9. При -подводе питающего воздуха пневматический сумматор 9 вырабатывает выходной пневматический сигнал Рг в виде переменного давления воздуха, который подводится к потребителю. Перемещение Sтолкателя 8 пневматического сумматора 9 является аналоговым сипналом, соответствующим фактической величине загрузки двигателя. Пневматический сигнал Р соответствует заданному программному значению загрузки двигателя. Входные и выходные сигналы, подводимые к пневматическому сумматору, связаны в датчике загрузки следующей формулой: Р PI - K-S, где К - коэффициент пропорциональности. Для двигателя 11 (см. фиг. 2), снабженного всережимным регулятором числа оборотов 12 с механическим входом 13, предназ 1аченным для изменения предварительной затяжки пружины всережимного регулятора, схема датчика загрузки остается прежней. При этом рычаг 14 управления рейкой 15 топливного насоса двигателя соединен тягой 16 с программным кулачком 17, воздействующим на толкатель 18 пневматического сумматора 19. Управляющий пневматический сигнал PI , подаваемый на вход 20 пневматического исполнительного механизма 21, воздействующего своим выходным органом 22 через рычаг 23 на механический вход 13 всережимного регулятора 12, подведен также к пневматическому входу 24 пневматического сумматора 19. Если точка, характеризующая режим работы дизеля в координатах «Ход рейки топливного насоса - обороты двигателя или в координатах «Ход рейки топливного насоса - величина управляющего п невматического сигнала, поступающего либо на вход всережимного регулятора оборотов двигателя, либо на. вход следящего исполнительного механизма дистанционной настройки всережимного регулятора, лежит на заданной- двигателю программной зависимости загрузки от числа оборотов при изменении оборотов во всем возможном диапазоне, то входные сигналы Р и S, также изменяясь во всем возможном диапазоне, остаются связанными равенством Рг PI-KS. В этом случае Рг Pi - K-S Рго const, а следовательно, Рг - Рго О, и выходной сигнал, вырабатываемый пневматическим сумматором, остается постоянным. Если точка, характеризующая режим работы двигателя, лежит при любых оборотах выще или ниже заданной программной, то Р Рго const, и, следовательно, Рг - - Рас Д PI 0. При этом, когда режимная точка лежит выше (или ниже) заданной программой, тогда А Pi 0 (или АРг 0). Кроме того,чем выиде (или ниже) отстоит режимная точка от заданной программой, тем больще абсолютная величина разности Д Рг., тем больще отличается величина Рг от величины Рго const. В двух последних случаях знак и абсолютная величина разности А Рг, Рг - Рго характеризуют направление и величину отклонения фактической загрузки, развиваемой двигателе1м, от величины загрузки, заданной двигателю программой загрузки, Формула изобретения Датчик загрузки двигателя, содержащего всережимный регулятор числа оборотов и рычаг управления рейкой топливного насоса, с которым соединен тягой программный кулачок, отличающийся тем, что, с целью повышения точности измерения загрузки двигателя, в него введен пневматический сумматор с толкателем, пневматический вход которого соединен с пневматическим входом всережимного регулятора числа оборотов, причем программный кулачок связан столкателем пневматического сумматора. Источники информации, принятые во внимание при экспертизе 1.Патент США-№ 3940977, кл. 73-116, 1974. 2.Авторское свидетельство СССР № 265503, кл. G 01 L 3/04, 1957.
Фиг.1
