1
Изобретение относится к приборам измерения перемещения транспортных средств и может быть применено для автоматических транспортных средств, например планетоходов.
Известно устройство для обнаружения бокового сноса транспортного средства, содержащее датчик пройденного пути соединенный со входом счетчика пройденного пути, выход которого через дешифратор подключен ко входам элементов И, датчик бокового сноса, RS-триггеры и исполнительный ю блок 1.
Однако указанное устройство только обнаруживает, но не измеряет величину бокового сноса. Кроме того, это устройство не позволяет производить прогнозирование роста величины бокового сноса в зависимости от пройденного пути. В случае, когда боковой снос уменьшается и величина его становится уже неопасной для транспортного средства, сигнал о нем, однако, записывается во всех трех RS-триггерах и элемент И выдает о сигнал на исполнительный блок.
Наиболее близким к изобретению техническим решением является устройство для измерения бокового сноса транспортного средства, содержащее интегратор, два входа ко торого соединены соответственно с выходом датчика бокового сноса и с первым выходом датчика пройденного пути, второй выход которого подключен к первому входу делителя, третий выход подключен к первому входу индикатора изменения скорости бокового сноса, один выход которого подключен к первому входу блока прогнозирования, первый выход интегратора подключен ко второму входу блока прогнозирования, выход которого через формирователь сигнала предельного бокового сноса подключен ко входу исполнительного блока 2.
. Недостаток известного устройства заключается в том, что датчик бокового сноса, который через шарнирный рычаг связан с самоориентируюш,имся колесом, реагирует как на увод, так и на боковой снос. Причем это отклонение датчика бокового сноса всегда направлено в сторону увода машины от курса и против направления бокового сноса. Поэтому направления отклонения датчика бокового сноса при уводе и сносе совпадают, если последние направлены в разные стороны, и не совпадают, если увод и боковой снос направлены в одну сторону.
Таким образом, если движение транспортного средства сопровождается уводом, то это искажает информацию датчика бокового сноса о величине сноса. Вследствие.этого может произойти так, что боковой снос достигнет предельного значения, а устройство не среагирует на него, и наоборот, боковой снос не достигнет предельного значения, а устройство выдаст сигнал на принятие необходимого маневра. Это снижает точность устройства.
Цель изобретения повышение точности устройства для измерения бокового сноса.
Поставленная цель достигается тем, что в устройство введены датчик курса, динамический корректор, блок задержки и сумматор, выход делителя соединен через динамический корректор с третьим входом интегратора, второй выход которого подключен ко второму входу индикатора изменения скорости бокового сноса, выходы датчика курса подключены к первым входам блока задержки и сумматора, четвертый выход датчика пройденного пути подключен ко второму входу блока зедержки, выход которого подключен ко второму входу сумматора, выход сумматора соединен со вторым входом делителя.
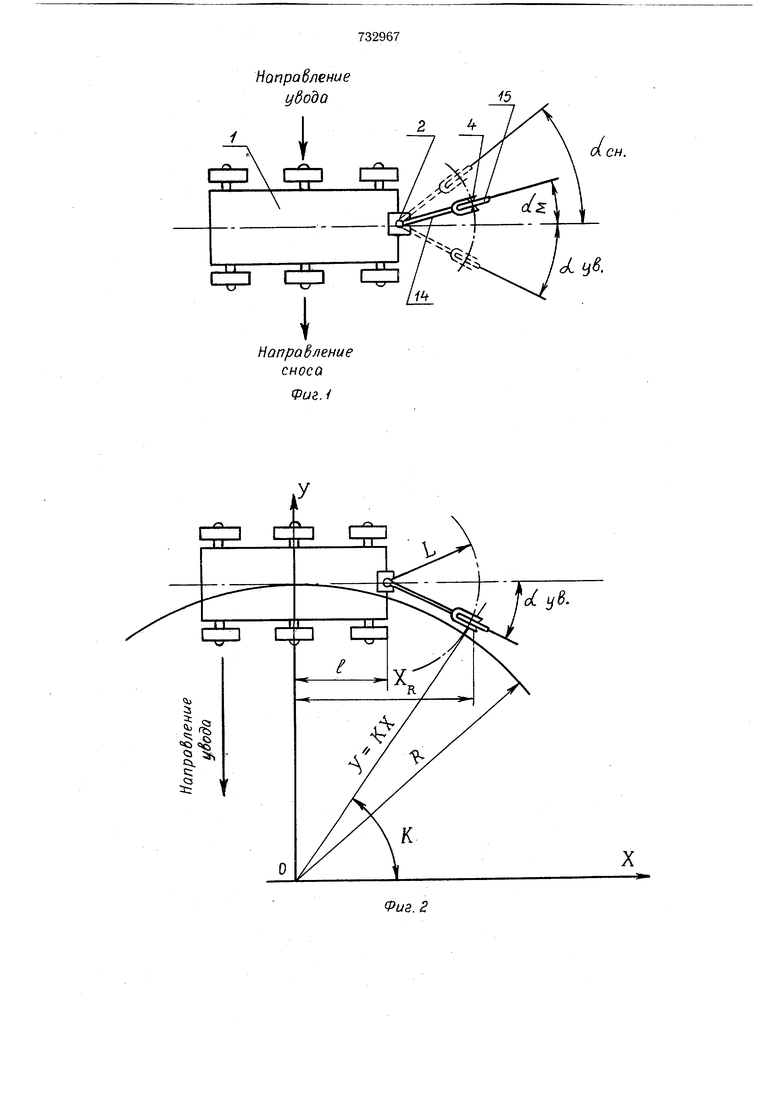
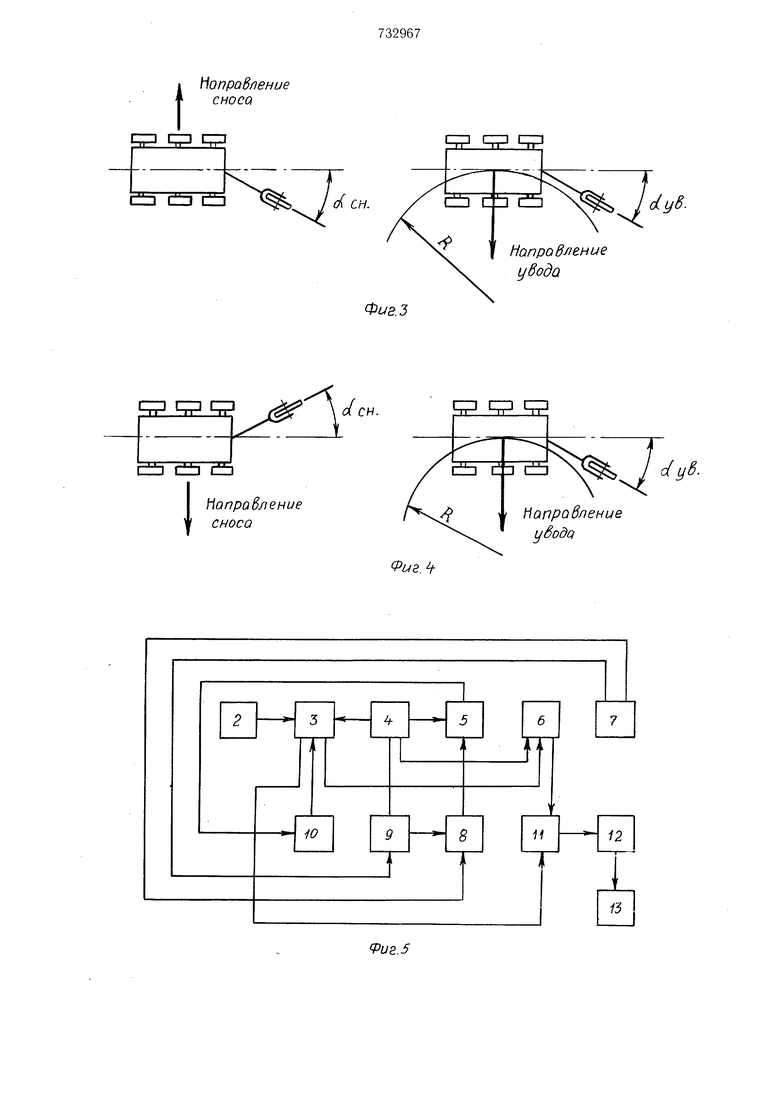
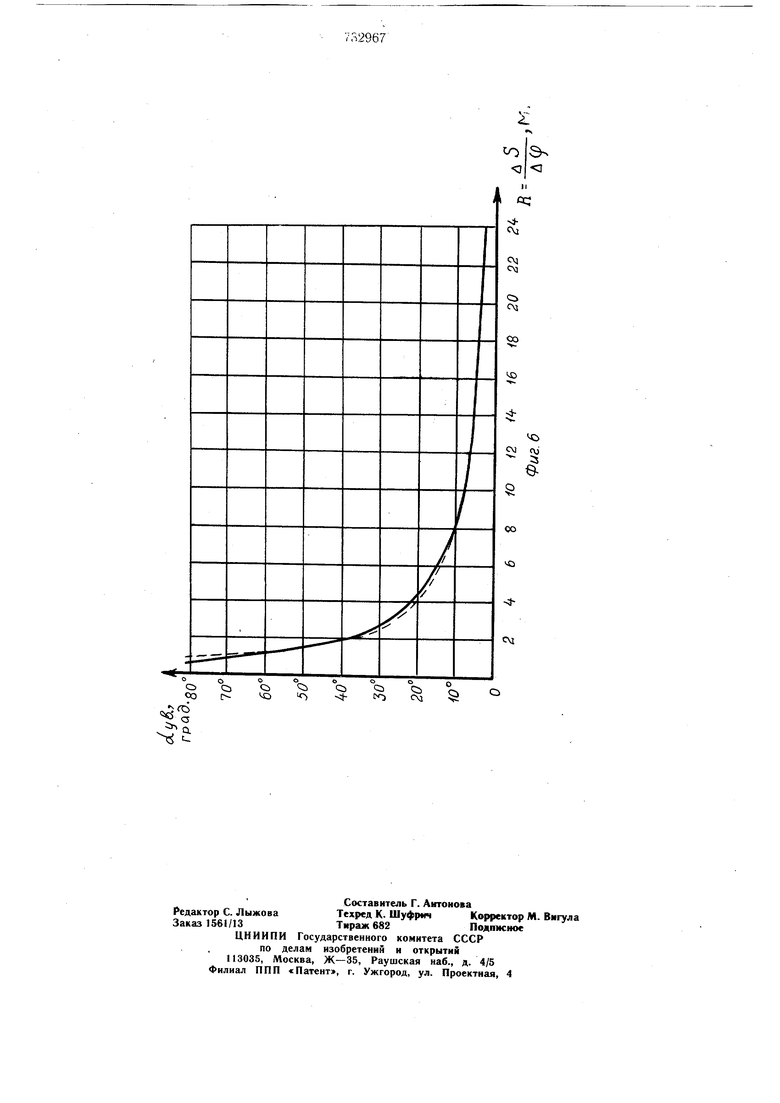
На фиг. I показаны положения самоориентирующегося колеса при наличии только увода или сноса, а также того и другого одновременно; на фиг. 2 - расчетная схема для определения угла отклонения датчика бокового сноса от продольной оси машины ( .), вызванного только уводом; на фиг. 3отклонение датчика бокового сноса в случае, когда боковой снос и увод от курса направлены в разные стороны; на фиг. 4 - отклонение датчика бокового сноса в случае, когда боковой снос и увод от курса направлены в одну сторону; на фиг. 5 - структурная схема устройства для измерения и прогнозирования бокового сноса транспортного средства; на фиг. 6 - график изменения угла отклонения () датчика бокового сноса от продольной оси транспортного средства в зависимости от радиуса R поворота при уводе для случая, когда Ь 1 м, L 0,5 м.
Устройство для измерения бокового сноса устанавливается на транспортном средстве 1 и содержит датчик 2 бокового сноса, интегратор 3, датчик 4 пройденного пути, делитель 5, индикатор 6 изменения скорости бокового сноса, датчик 7 курса, блок 8 суммирования, блок 9 задержки, динамический корректор 10, блок 11 прогнозирования, формирователь 12 сигнала предельного бокового сноса, исполнительное устройство 13, поворотный рычаг 14 и самоориентирующееся колесо 15.
В качестве датчика 2 бокового сноса может быть использован, например, потенциометрический синусный преобразователь.
связанный через поворотный рычаг с самоориентирующимся колесом 15.
Интегратор 3 предназначен для измерения величины бокового сноса в процессе движения транспортного средства и может
быть выполнен, например, в виде суммирующего операционного усилителя с интегрирующей емкостью. Управление суммированием осуществляется от сигналов, поступающих от датчика 4 пройденного пути, который может быть выполнен в виде свободнокатящегося колеса 15 со счетчиком оборотов.
Делитель 5 может состоять из функционального преобразователя, дающего величину, обратную величине радиуса поворота транспортного средства.
Индикатор 6 изменения скорости бокового сноса может быть выполнен в виде емкостного накопителя и служит для определения величины приращения скорости бокового сноса в зависимости от пройденного пути.
Датчик 7 курса предназначен для измерения угла отклонения продольной оси транспортного средства от заданного направления движения. В качестве датчика курса
может быть использован, например, курсоуказатель ГИК-2.
Блок 8 суммирования предназначен для суммирования сигналов, поступающих от датчика 7 курса и блока 9 задержки, и может быть выполнен, например, на операционных усилителях 140-й серии.
Блок 9 задержки предназначен для задержки сигнала, поступающего от датчика 7 курса, и последующей выдачи этого сигнала в блок 8 суммирования. Блок задержки может быть выполнен, например, в виде реле времени.
Динамический корректор 10 предназначен для определения угла отклонения датчика бокового сноса, обусловленного только уводом от курса ctyg.
Блок 11 прогнозирования предназначен для суммирования составляющих величин бокового сноса.
Формирователь 12 сигнала предельного бокового сноса предназначен для выдачи
сигнала в исполнительное устройство 13 в том случае, когда прогнозируемый боковой снос достигает предельного значения. Формирователь 12 представляет собой пороговое устройство, сигнал на выходе которого позволяется только тогда, когда входной
сигнал превышает заданное значение.
Работает устройства происходит следующим образом.
При движении транспортного средства сигнал с одного из выходов датчика 7 курса поступает на вход блока 9 задержки, а с другого - на один из входов блока 8 суммирования. В блоке 9 задержки происходит задержка сигнала, поступившего от датчика 7 курса, до тех пор, пока транспортное средство не пройдет мерный отрезок пути AS Управление блоком 9 задержки происходит по сигналам, поступающим от датчика 4 пути. После того, как транспортное средство пройдет мерный путь, равный AS, с выхода блока 9 задержки поступает задержанный сигнал на второй вход блока 8 суммирования (1 - курсовой угол в момент начала поворота транспортного средства, г- курсовой угол в момент времени, когда транспортное средство прошло путь, равный AS), на один из входов делителя 5 поступает сигнал, равный yi- yj. С выхода блока 8 суммирования на другои вход этого делителя поступает сигнал с датчика 4 пути, равный мерному отрезку пути AS. В делителе 5 происходит вычисление радиуса R поворота транспортного средства. С выхода делителя 5 сигнал поступает на вход динамического корректора 10, в котором происходит вычисление угла отклонения рычага 14 от продольной оси транспортного средства. Затем сигналы с выхода динамического корректора 10, датчика 2 бокового сноса и датчика 4 пути поступают на соответствующие входы интегратора 3. В интеграторе 3 происходит вычисление величины угла отклонения датчика бокового сноса и интегрирование этой величины по пути. С выхода интегратора 3 снимается сигнал, пропорциональный величине бокового сноса в данный момент времени. Этот сигнал поступает на один из входов индикатора 6 изменения скорости бокового сноса, а на второй вход этого Индикатора поступает сигнал от датчика 4 пути. В индикаторе 6 происходит вычисление величины прирашения бокового сноса. С выхода индикатора 6 и со второго выхода интегратора 3 сигналы поступают на соответствующие входы блока 11 прогнозирования, в котором происходит вычисление прогнозируемой величины бокового сноса. С выхода блока I1 прогнозирования через формирователь 12 сигнала предельного сноса сигнал поступает на вход исполнительного устройства 13. Исполнительное устройство определяет стратегию движения транспортного средства, останавливая его или совершая необходимый маневр в соответствии с программой движения по сигналу, поступившему с формирователя 12. Формула изобретения Устройство для измерения бокового сноса транспортного средства, содержащее интегратор, два входа которого соединены соответственно с выходом датчика бокового сноса и с первым выходом датчика пройденного пути, второй выход которого- подключен к первому входу делителя, третий выход подключен к первому входу индикатора изменения скорости бокового сноса, один выход которого подключен к первому входу блока прогнозирования, первый выход интегратора подключен ко второму входу блока прогнозирования, выход которого через формирователь сигнала предельного бокового сноса подключен ко входу исполнит льного блока, отличающееся тем, что, с целью повышения точности устройства, в него введены датчик курса, динамический корректор, блок задержки и сумматор, выход делителя соединен через динамический корректор с третьим входом интегратора, второй выход которого подключен ко второму входу индикатора изменения скорости бокового сноса, выходы датчика курса подключены к первым входам блока зедержки и сумматора, четвертый выход датчика пройденного пути подключен ко второму входу блока задержки, выход которого подключен ко второму входу сумматора, выход сумматора соединен со вторым входом делителя. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 529474, кл. G 08 G 1/01, 1976. 2.Авторское свидетельство СССР по заявке № 2436563/18-24, кл. G 01 G 1/09, 20.12.76, (прототип).
Поправление убодо
ХСз О
О о
Направление сноса
Фиг.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения бокового сноса транспортного средства | 1980 |
|
SU855719A1 |
| Устройство для регулирования направления движения автоматического транспортного средства | 1977 |
|
SU682879A1 |
| Устройство для обнаружения боково-гО CHOCA ТРАНСпОРТНОгО СРЕдСТВА | 1978 |
|
SU799684A1 |
| Устройство для обнаружения бокового сноса транспортного средства | 1975 |
|
SU529474A1 |
| Устройство для определения траекторий движения наземного транспортного средства | 1978 |
|
SU877579A1 |
| АНАЛИЗАТОР ПАРАМЕТРОВ ДВИЖЕНИЯ ЛОКОМОТИВА | 2012 |
|
RU2526730C2 |
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2160927C1 |
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2163732C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2150409C1 |
| Устройство для измерения рельефа местности | 1982 |
|
SU1089414A2 |
с
Физ.г Ф
Направление сноса
гтГсг/.
СП CD С5
dyB.
I±±J t±±
Папраблвние 1 c/yoct
:;Р i::; ;
.
ЭСО
0
CM ry
es
X
СЧ1
о Ci
Ci
CiC3
Ci
41- o
10
l
о Ci
Ci CM
