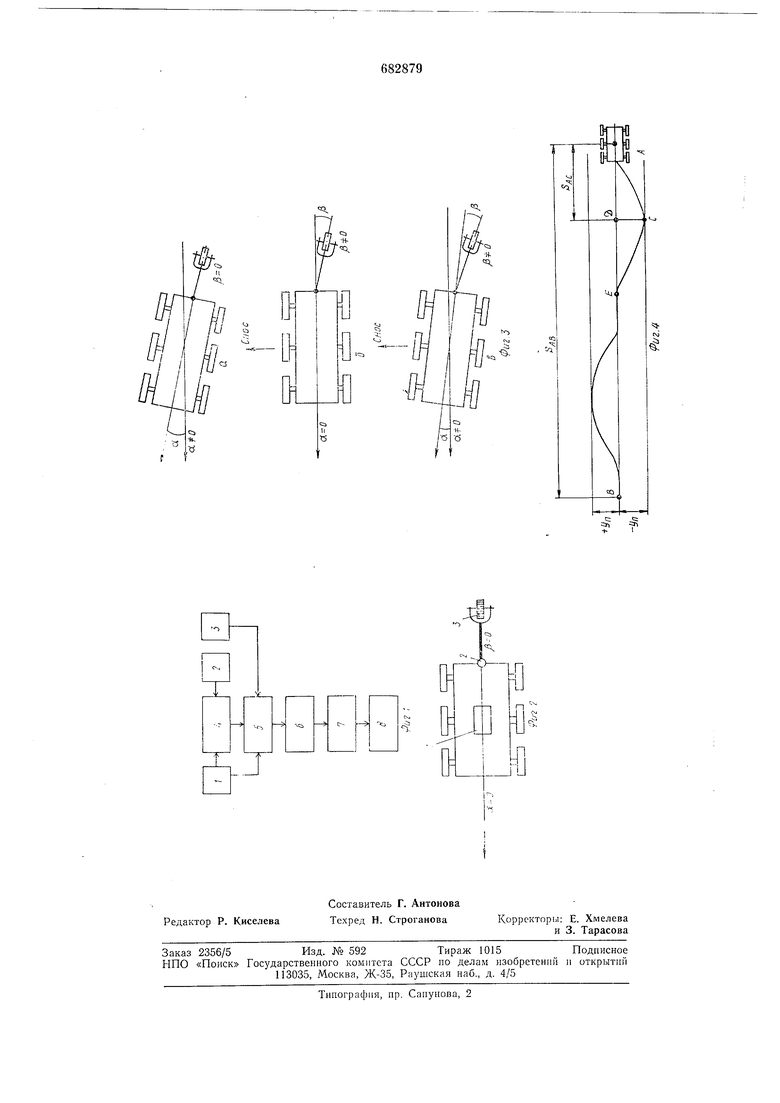
автоматического транспортного средства в заданной полосе. Устройство для корректировки направления движения содержит датчик 1 курса, датчик 2 бокового сноса, датчик 3 пути, сумматор 4, интегратор 5, компаратор 6 и блок 7 управления, связанный с исполнительным механизмом 8, обеснечивающим управлеипе ведущими колесами. Датчик курса иредназначен для измерения курсового отклонения а(5) транспортного средства относительно первоначально заданного направления движения. Датчик курса имеет три выхода: на одном выходе выдается текущее отклонение а(5), на двух других - синус и косинус этого отклонения. Выход a(S) нодключен ко второму входу компаратора 6, выход sina(5) - к одному из входов сумматора 4, выход cosa{S) - к третьему входу блока 5 интегрирования. В качестве датчика 1 курса можно использовать любой стандартный датчик курса, поставив на выходе сипуснокосинусный трансформатор, например БСКТ-1. Датчик 2 бокового сноса предпазначен для измерения угла бокового сноса (3(5) и может быть выполнен, наиример, в виде свободно катящегося колеса, установ.ченного на одном конце рычага рояльного типа, другой конец которого крепится к корпусу транспортного средства. По углу отклонения рычага относительно нродольной осп транспортного средства можно судить о величине угла боковогО сноса. В месте крепления рычага к корпусу установлен потенциометрический датчик, на выходе которого имеется нанряжение, пропорциональное синусу угла бокового споса sinp{5). Выход датчика бокового сноса подключен ко второму входу сумматора 4. Датчик 3 пути предназначен для измерения пройденного пути и может быть выполнен в виде свободно катящегося колеса. Выход датчика пути подключен ко второму входу интегратора 5. Сумматор 4 предназначен для сложения сигналов, поступающих от датчика 1 курса и датчика 2 бокового сноса. На его выходе сигнал пропорционален sina(S)+sinp(5). Сумматор 4 может быть выполнен на операционных усилителях типа 1УТ402, его выход подключен к первому входу интегратора 5. Интегратор 5 предназначен для реализации зависимостей: У, f sin а (5) + Sin (5) dS; (2) S {coso.(S)dS, о где УТ - текущее отклонение транспортного средства от первоначально заданного паправления; S - путь, пройденный транспортным средством с начала момента движения;Sn - проекция пути на направление Интегратор 5 может быть выполнен на основе онерациоиного усилителя с интегрирующей емкостью в цепи обратной связи. Второй вход интегратора 5 соединен с выходом датчика 3 пути, а выход - подключен к первому входу компаратора 6. Компаратор 6 предназначен для сравнения текущего отклонения УТ транспортного средства от первоначально заданного направления с заданным пороговым значением УП и выдачи результатов сравнения в блок 7 управления. Компаратор 6 может быть выполнен па операционных усилителях типа 1УТ402. Блок 7 управления предназначен для управления ведзЩ.ими колесами правого и левого бортов по сигналам компаратора 6 и может быть реализован на реле и дистанционных переключателях. Устройство работает следующим образом. В процессе движения транспортного средства по исследуемой поверхности может произойти его отклонение УТ от заданного направления. Это отклонение может быть вызвано несколькими причинами: -изменением курса, обусловленным различными тяговыми характеристиками колес правого и левого бортов, наездом колесами одного борта на камень и т. д. (фиг. 3,а); -появлением бокового сноса, обусловленным низкими тяговосцепными свойствами грунта при движении по местности, имеющей значительный уклон (фиг. 3,6); -изменением курса и наличием бокового сноса (фиг. 3, б). В первом случае сигнал на выходе датчика 2 бокового сноса отс тствует и на выходе интегратора 5 текущее отклонение УТ определяется только изменением курса транспортного средства и описывается уравнением У У sma(S}dS, о где УК - отклонение, вызванное изменением курса. Во втором случае отсутствует сигнал на выходе датчика 7 курса, отклонение УТ определяется величиной бокового сноса и описывается уравнением y (S)dS, где УС - отклонение, вызванное наличием бокового сноса.
В третьем, более общем случае отклонение УТ определяется и величиной изменения курса, и величиной бокового сноса
+ УС- sin а (5) +sin р (5) Й5. о
Таким образом в нроцсссе движения транспорт юго средства по исследуемой поверхности сигналы с выходов датчиков 1 курса и 2 бокового сноса ностунают на выходы сумматора 4, в котором реализуется зависимость (1).
Выходной сигнал, вырабатываемый сумматором 4, а также сигнал, снимаемый с выхода датчика пути, поступают на соответствующие входы интегратора 5, в котором реализуется зависимость (2).
Сигнал, снимаемый t; выхода интегратора 5, подается в комнаратор б, в котором происходит сравнение УТ с пороговым значением отклонения Уп. Если текущее отклонение превышает пороговое значение отклонения, (фиг. 4), то Б блоке управления вырабатывается команда на поворот транспортного средства.
Поворот транспортного средства осуществляется за счет разности оборотов движителей правого и левого бортов. При этом направление поворота выбирается в зависимости от знака УТ. Если УТ отрицательно, т. е. транспортное средство отклоняется влево от заданного направления движения АВ (фиг. 4), то производится поворот направо, если УТ положительно, то производится поворот налево. Таким образом, поворот транспортного средства осуществляется всегда в сторону линии АВ. Поэтому нрн дальнейшем движении |Ут| уменьшается. Когда выполняется условие УТ О, в блоке управления 7 вырабатывается команда на поворот транспортного средства в противоположном направлении. Таким образом, транспортное средство, выйдя на заданную лннию движения, новорачивается на заданный курс. Когда выполняется условие a(S)0, транспортное средство будет дзнгаться в заданном направлении (после точки Е на фит. 4) до тех пор, пока не появятся причины, которые вызовут его новое отклонение от заданного направления.
Для остановки транспортного средства в заданном месте, например на рубеже проходящем через точку В, используется
зависимость (3), реализуемая интегратором 5. При этом на вход компаратора 6 с интегратора 5 приходит сигнал, пропорциональный проекции пройденного пути на направление АВ. Когда выполнится условне
Sn SAB,
с выхода компаратора 6 в блок управления 7 выдается сигнал, приводящий к остановке транспортного средства.
Формула изобретения
Устройство для регулирования направления движения автоматического транспортного средства, содержащее датчик курса и блок управления, связанный с исполнительным механизмом, отличающееся тем, что, с целью повышения точности устройства, в него введены датчик бокового сноса, датчик пути, сумматор, компаратор и интегратор, выходы датчика курса и датчика бокового сноса соединены со входами сумматора, выход которого подключен к первому входу интегратора, выход датчика курса и датчика пути подключены соответственно ко второму и третьему входам интегратора, выход которого через компаратор соединен со входом блока управления.
Источники информации,
принятые во внимание при экспертизе
1.Патент Франции Л 2031180, G G5D 1/00, 1970.
2.Патент Франции № 2028400, G 05D 1/00, 1970 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения бокового сноса транспортного средства | 1977 |
|
SU732967A1 |
| Устройство для обнаружения боково-гО CHOCA ТРАНСпОРТНОгО СРЕдСТВА | 1978 |
|
SU799684A1 |
| Устройство для измерения бокового сноса транспортного средства | 1980 |
|
SU855719A1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2144884C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2150409C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА ПО ЗАДАННОЙ ТРАЕКТОРИИ | 2011 |
|
RU2483973C2 |
| СПОСОБ КОНТРОЛЯ ПИЛОТАЖНО-НАВИГАЦИОННОГО КОМПЛЕКСА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2658538C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ САМОЛЕТА ПРИ ЗАХОДЕ НА ПОСАДКУ | 2017 |
|
RU2662576C1 |
| Тренажер для обучения управлению курсом судна | 1985 |
|
SU1355993A1 |
| Устройство для измерения рельефа местности | 1977 |
|
SU735918A2 |