(54) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ БОКОВОГО СНОСА ТРАНСПОРТНОГО СРЕДСТВА
1
Изобретение относится к информационным системам, которые определяют параметры траектории движения транспортного средства, и может быть применено в автоматических и полуавтоматических транспортных средствах, например планетоходах.
Известно устройство для обнаружения бокового сноса транспортного средства, содержащее датчик пройденного пути, соединенный со входом счетчика пройденного пути, датчик бокового сноса, дешифратор, группу элементов И, триггеры и исполнительный блок (1).
Недостатком такого устройства является то, «по контроль положения датчика бокового сноса осуществляется не непрерывно, а периодически - в точках траектории пути, отстоящих друг от друга на определенном расстоянии. Однако во время движения транспортного средства между 20 точками замера боковой снос может существенно изменяться, что с помощью данного устройства не может быть зафиксировано. Это снижает точность устройства.
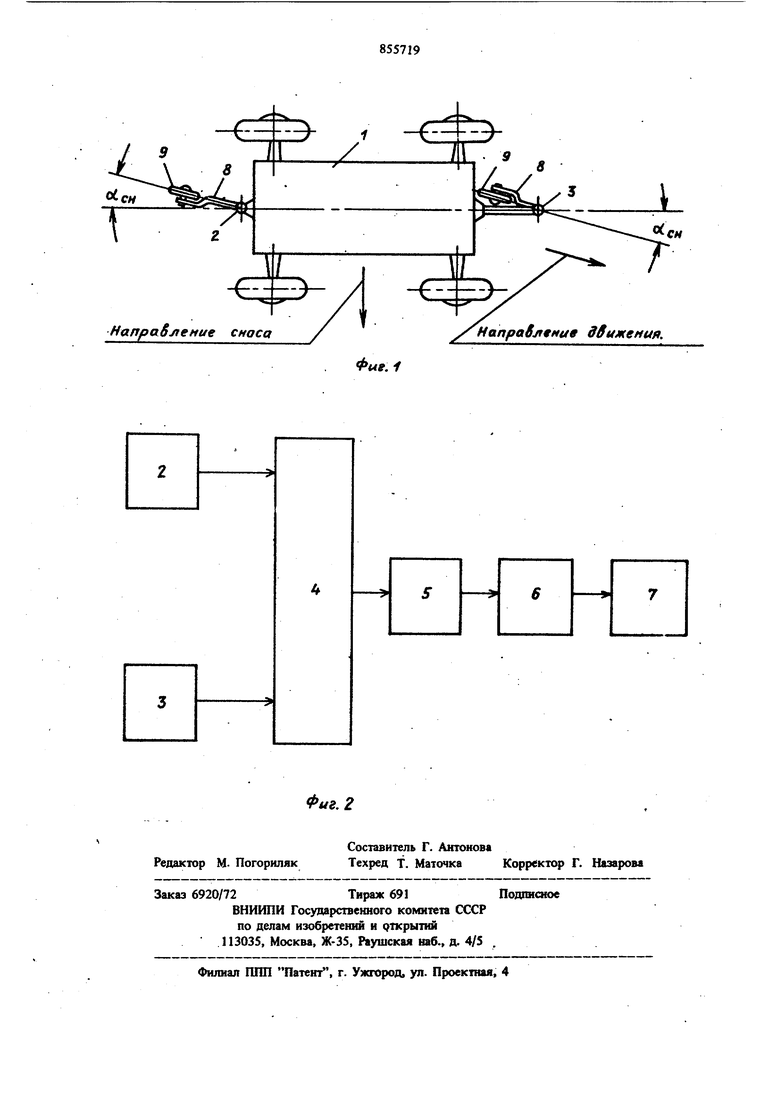
Наиболее близким техническим решением к изобретению является устройство для измерения бокового сноса транспортного средства, содержащее датчнк бокового сноса, исполнительный блок, датчик пройденного пути, измеритель скорости бокового сноса и истинной скорости движения транспортного средства, интегратор, индикатор изменения скорости бокового сноса, форниирователь сигнала предельного бокового сноса, делитель, блок прогнозирования и два умножителя. При этом первьш вход индикатора изменения скорости бокового сноса подключен к датчику пройденного пути, другой его вход через измеритель скорости бокового сноса подключен к датчику бокового сноса и измерителю истинной скорости движения транспортного средства, а выход через первый умножитель подключен ко входу блока деления, входы первого и второго умножителей соединены, соответственно, с измерителем истинной скорюсти движения транспортного средства и датчиком пройдейного пути. Выходы датчиков бокового сноса и пройденного пути, интегратора и блока деления соединены со входом блока 3 прогнозирования, который через фopмиpoвateль предельного сноса соединен с исполнительным блоком 2. Однако указанное устройство также не обес печивает высокой точности измерения бокового сноса транспортного средства. Цель изобретения - повышение точности устройства для измерения бокового отоса транспортного средства. Указанная цель достигается тем, что в устройство введены дополнительный датчик бокового сноса и сумматор, выходы датчиков бокового сноса подключены ко входам сумматора, выход которого через делитель соединен со входом формирователя сигнала предельного бокового сноса, а дополнительный датчик боко вого сноса установлен с другой стороны транспортного средства по его продольной оси. На фиг. 1 показано положение датчиков бокового сноса, соответствующее движению транспортного средства, сопровождающемуся боковым сносом; на фиг. 2 - структурная схема устройства для определения интенсивное ти бокового сноса. Устройство для измерения бокового сноса устанавливается на транспортном средстве 1 и содержит два датчика бокового сноса 2 и 3 один из которых установлен сзади, а другой спереди транспортного средства по его продоль ной осн. Кроме того, устройство содержит сум матор 4, делитель 5, формирователь 6 сигнала предельного бокового сноса и исполнительный блок 7. В качестве датчика бокового сноса может быть использован, например, потенциометр, связанный через поворотный рычаг 8 с самоориентирующимся колесом 9. Сумматор 4 предназначен для суммирования сигналов, поступающих от датчиков 2 и 3 бокового сноса. Делитель 5 предназначен для уменьшения сигнала,поступающего с сумматора, на постоянную величину, равную двум. Формирователь 6 сигн ла предельного бокового сноса служит для выдачи сигнала в исполнительный блок 7 в том случае, когда интенсивность бокового сноса достигнет предельного значения. Устройство работает следующим образом. При движении транспортного средства по поверхности может происходит отклоиеиие его траектории от заданного направления изза появления бокового сноса и убода, что вызьгоает отклоненне поворотных рычагов 8, связанных с датчиками 2 и 3 бокового сноса на углы. С выхода датчиков 2 и 3 бокового сноса сигналы поступают в сумматор 4, где происходит их сложение. С выхода сумматора 4 сигнал поступает в делитель 5, в котором происходит уменьщениё величины сигнала в два раза. С выхода делителя сигнал поступает в формирователь 6, с выхода которого сигнал поступает на исполнительный блок 7, если сигнал, вырабатываемый в делнтеле 5, превышает пороговое значение. Исполнительный блок определяет стратегию движения транспортного средства, останавливая его или совершая необходимый маневр в соответствии с программой движения. Формула изобретения Устройство для измерения бокового сноса транспортного средства, содержащее датчик бокового сноса, установленный с одной стороны транспортного средства по его продольной оси, делитель и формирователь сигнала предельного бокового сноса, выход которого подключен ко входу исполнительного блока, отличающееся тем, что, с целью повышения точности устройства, в него введены дополнитель ный датчик бокового сноса и сумматор, выходы датчиков бокового сноса подключены ко входам сумматора, выход которого через делитель соединен со входом формирователя снгнала предельного бокового сноса, а дополнительный датчик бокового сноса установлен с другой стороны транспортного средства по его продольной оси. Источники информации, принятые во внимание при зкспертизе 1.Авторское свидетельство СССР N 529474, кл. G 08 G 1/01, 1976. 2.Авторское свидетельство СССР № 638157, кл. G 08 G i/09, 1976.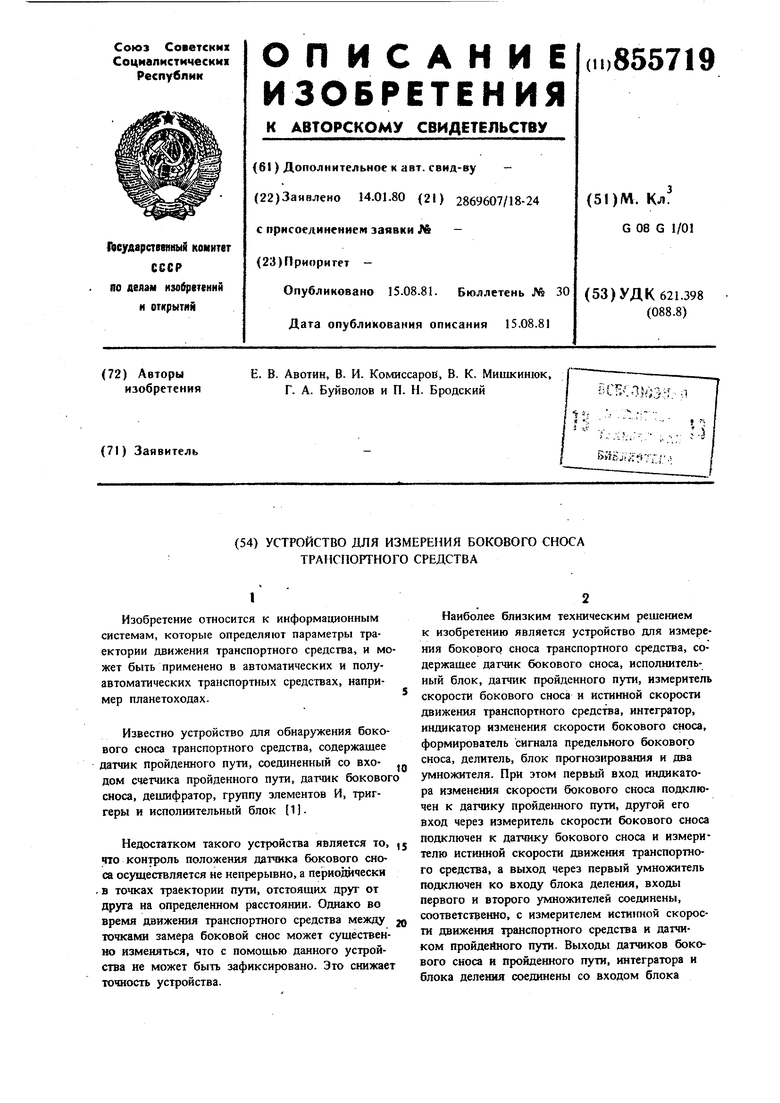
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения бокового сноса транспортного средства | 1977 |
|
SU732967A1 |
| Устройство для регулирования направления движения автоматического транспортного средства | 1977 |
|
SU682879A1 |
| Устройство для обнаружения бокового сноса транспортного средства | 1975 |
|
SU529474A1 |
| Устройство для обнаружения боково-гО CHOCA ТРАНСпОРТНОгО СРЕдСТВА | 1978 |
|
SU799684A1 |
| Устройство автоматической коррекции траектории движения колесного транспортного средства | 1980 |
|
SU933525A1 |
| Устройство для регулирования скорости движения транспортного средства | 1983 |
|
SU1117679A1 |
| Устройство для управления транспорт-НыМ СРЕдСТВОМ | 1978 |
|
SU809076A1 |
| Устройство для измерения рельефа местности | 1982 |
|
SU1089414A2 |
| Устройство для контроля путевых параметров транспортного средства | 1986 |
|
SU1495173A1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТОР | 1984 |
|
SU1238702A1 |