(54) УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ БОКОВОГО СНОСА ТРАНСПОРТНОГО СРЕДСТВА
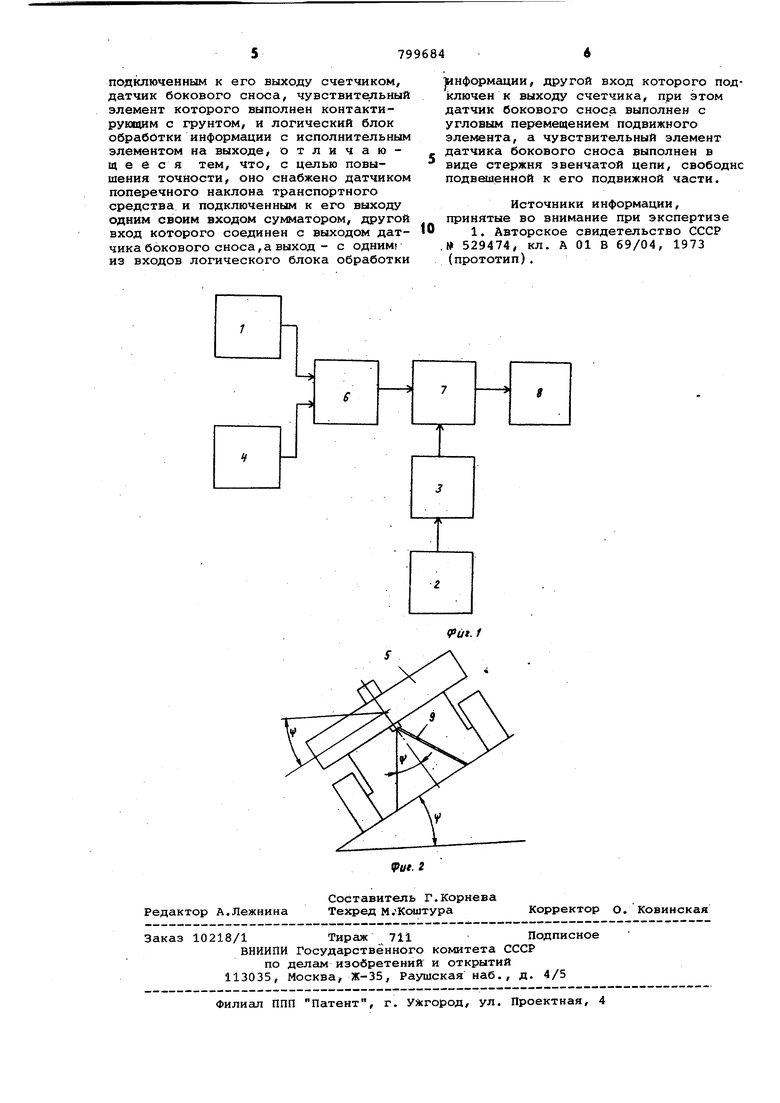
осью вращения и продольной осью,- проходящей через центр тяжести транспортного средства, было минимально. Установка датчика 1 в таком поло ении позволяет свести к минимуму погрешности измерения, обусловленные поперечными колебаниями транспортного средства 5. Ось вращения потенциометрического датчика -связана с одним из концов чувствительного элемента 9 (фиг. 2), другой конец которого контактирует с грунтом, С целью повышения проходимости транспортного средства 5 чувствительный элемент 9 может быть выполнен в виде звенчатой свободновисящей цепи,звень которой совершают вращение друг относительно друга в вертикально-поперечной плоскости, в вертикально-поперечной плоскости звенчатая цепь остаетс жесткой, пoэтo Iy при боковом скольжении она работает как жесткий стержень, что позволяет ей осуществлять поворот оси вращения потенциометрического датчика.
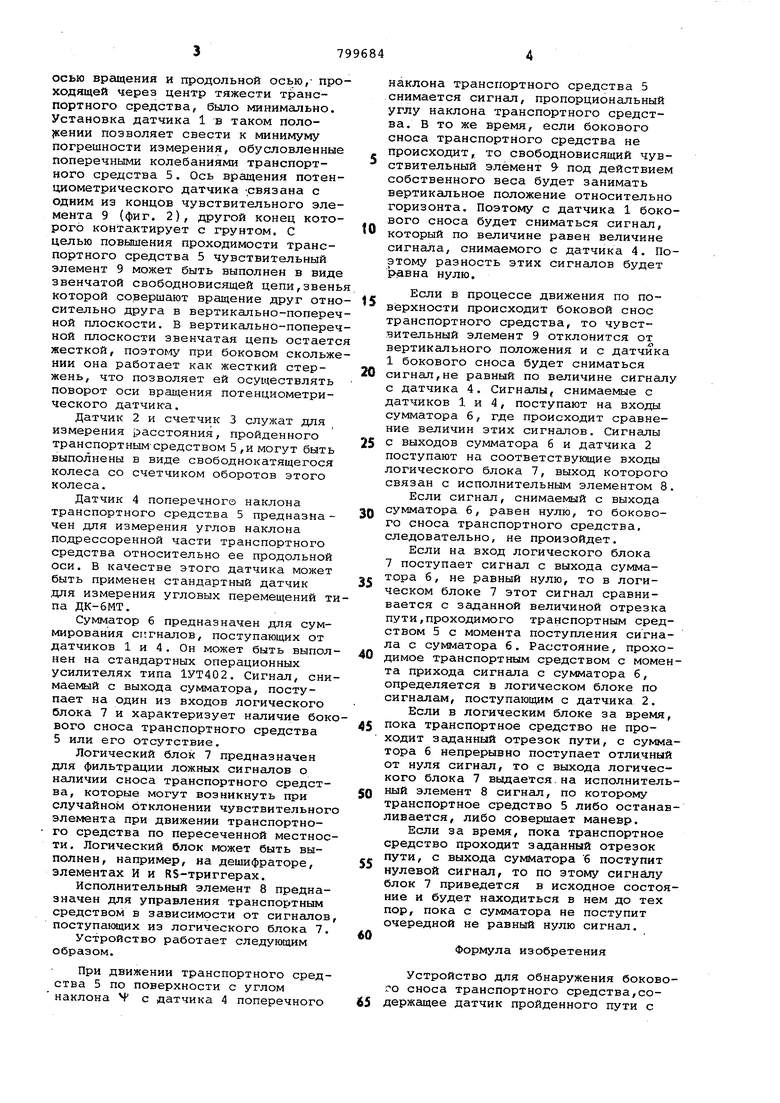
Датчик 2 и счетчик 3 служат для измерения расстояния, пройденного транспортным-средством 5 ,и могут быть выполнены в виде свободнокатящагося колеса со счетчиком оборотов этого колеса.
Датчик 4 поперечного наклона транспортного средства 5 предназна чен для измерения углов наклона подрессоренной части транспортного средства относительно ее продольной оси. В качестве этого датчика может быть применен стандартный датчик для измерения угловых перемещений типа ДК-бМТ.
Сумматор б предназначен для суммирования спгнашов, поступающих от датчиков 1 и 4. Он может быть выполнен на стандартных операционных усилителях типа 1УТ402. Сигнал, снимаемый с выхода сумматора, поступает на один из входов логического блока 7 и характеризует наличие бокового сноса транспортного средства 5 или его отсутствие.
Логический блок 7 предназначен для фильтрации ложных сигналов о наличии сноса транспортного средства, которые могут возникнуть при случайном отклонении чувствительного элемента при движении транспортного средства по пересеченной местности. Логический блок может быть выполнен, например, на дешифраторе, элементах И и RS-триггерах.
Исполнительный элемент 8 предназначен для управления транспортным средством в зависимости от сигналов поступающих из логического блока 7.
Устройство работает следующим образом.
При движении транспортного средства 5 по поверхности с углом наклона Ч с датчика 4 поперечного
наклона транспортного средства 5 снимается сигнал, пропорциональный углу наклона транспортного средства. В то же время, если бокового сноса транспортного средства не происходит, то свободновисящий чувствительный элемент 9- под действием собственного веса будет занимать вертикальное положение относительно горизонта. Поэтому с датчика 1 бокового сноса будет сниматься сигнал, который по величине равен величине сигнала, снимаемого с датчика 4. Поэтому разность этих сигналов будет РЗвна нулю.
Если в процессе движения по пов ерхности происходит боковой снос транспортного средства, то чувствительный элемент 9 отклонится от вертикального положения и с датчика 1 бокового сноса будет сниматься сигнал,не равный по величине сигналу с датчика 4. Сигналы, снимаемые с датчиков 1 и 4, поступают на входы сумматора б, где происходит сравнение величин этих сигналов. Сигналы с выходов сумматора 6 и датчика 2 поступают на соответствукяцие входы логического блока 7, выход которого связан с исполнительным элементом 8.
Если сигнал, снимаемый с выхода сумматора б, равен нулю, то бокового сноса транспортного средства, следовательно, не произойдет.
Если на вход логического блока 7 поступает сигнал с выхода сумматора 6, не равный нулю, то в логическом блоке 7 этот сигнал сравнивается с заданной величиной отрезка пути,проходимого транспортным средством 5 с момента поступления сигнала с сумматора 6. Расстояние, проходимое транспортным средством с момента прихода сигнала с сумматора б, определяется в логическом блоке по сигналам, поступающим с датчика 2.
Если в логическим блоке за время пока транспортное средство не проходит заданный отрезок пути, с сумматора б непрерывно поступает отличный от нуля сигнал, то с выхода логического блока 7 выдается.на исполнительный элемент 8 сигнал, по которому транспортное средство 5 либо останавливается, либо совершает маневр.
Если за время, пока транспортное средство проходит заданный отрезок пути, с выхода сумматора б поступит нулевой сигнал, то по этому сигналу блок 7 приведется в исходное состояние и будет находиться в нем до тех пор, пока с сумматора не поступит очередной не равный нулю сигнал.
Формула изобретения
Устройство для обнаружения бокового сноса транспортного средства,содержащее датчик пройденного пути с
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования направления движения автоматического транспортного средства | 1977 |
|
SU682879A1 |
| Устройство для измерения бокового сноса транспортного средства | 1977 |
|
SU732967A1 |
| Устройство для обнаружения бокового сноса транспортного средства | 1975 |
|
SU529474A1 |
| Устройство для измерения бокового сноса транспортного средства | 1980 |
|
SU855719A1 |
| Устройство автоматической коррекции траектории движения колесного транспортного средства | 1980 |
|
SU933525A1 |
| Устройство для измерения рельефа местности | 1977 |
|
SU735918A2 |
| Устройство для измерения рельефа местности | 1982 |
|
SU1089414A2 |
| Устройство для измерения бокового сноса транспортного средства | 1981 |
|
SU1033032A1 |
| Устройство для измерения рельефа местности | 1986 |
|
SU1339395A2 |
| Устройство для обнаружения бокового сноса транспортного средства | 1980 |
|
SU934941A1 |
