Изобретение относится к автомобилестроению, в частности к устройствам для управления поворотом длиннобазных транспортных средств как одиночных, так и входящих в состав многозвенных автопоездов.
Известно устройство по авт. св. № 660883 содержащее датчик угла поворота передних управляемых колес, установленный на раме транспортного средства, и силовой привод передних и задних управляемых колес, причем датчик угла поворота кинематически связан с передними управляемыми колесами, датчик угла поворота рамы, установленный на раме транспортного средства, и два сумматора, первый из которых своими входами соединен с датчиком угла поворота рамы и с датчиком угла поворота передних управляемых колес, а выходом - с входом устройства запаздывания, а вторая своими входами соединен с датчиком угла поворота рамы и выходом устройства запаздывания, а выходом - с силовым приводом задних управляемых колес 1.
Недостаток устройства - блоки считывания и запаздывания соединены со вторым входом второго сумматора. В результате этого силовой привод поворачивает задние колеса на угол, равный углу наклона касательной к траектории движения передних колес в той точке, в которой быяа осуществлена запись на носитель информации значения, снимаемого в данный МОмент блоком считывания. При дальнейшем движении силовой привод отслеживает данное прямолинейное движение до следующего момента считывания. В результате этого траектория движения задних колес представляет собой ломаную линию, постепенно удаляющуюся от действительной траектории передних колес. Для уменьщения указанных расхождений траекторий передних и задних колес требуется уменьщение дискретности работы устройства по пути, что неизбежно приводит к необходимости повыщения точности измерений углов, увеличению объема памяти устройства запаздывания, скорости вычислений, что в свою очередь ведет к усложнению и удорожанию устройства.
Цель изобретения - улучшение управляемости транспортного средства путем повышения точности повторения траектории передних колес задними.
Указанная цель достигается тем, что устройство снабжено датчиками пути, проходимого передними, и задними колесами, а устройство запаздывания выполнено в виде носителя информации, блока записи, двух блоков считывания, подвижных относительно носителя информации, и блока вычис.ления среднего значения, при этом датчик пути, проходимого передними колесами, кинематически связан с передними колесами
и электрически - с блоком записи, а датчик пути, проходимого задними колесами, кинематически связан с задними колесами и электрически - с блоками считыания,
выходы которых соединены со входами блока вычисления среднего значения.
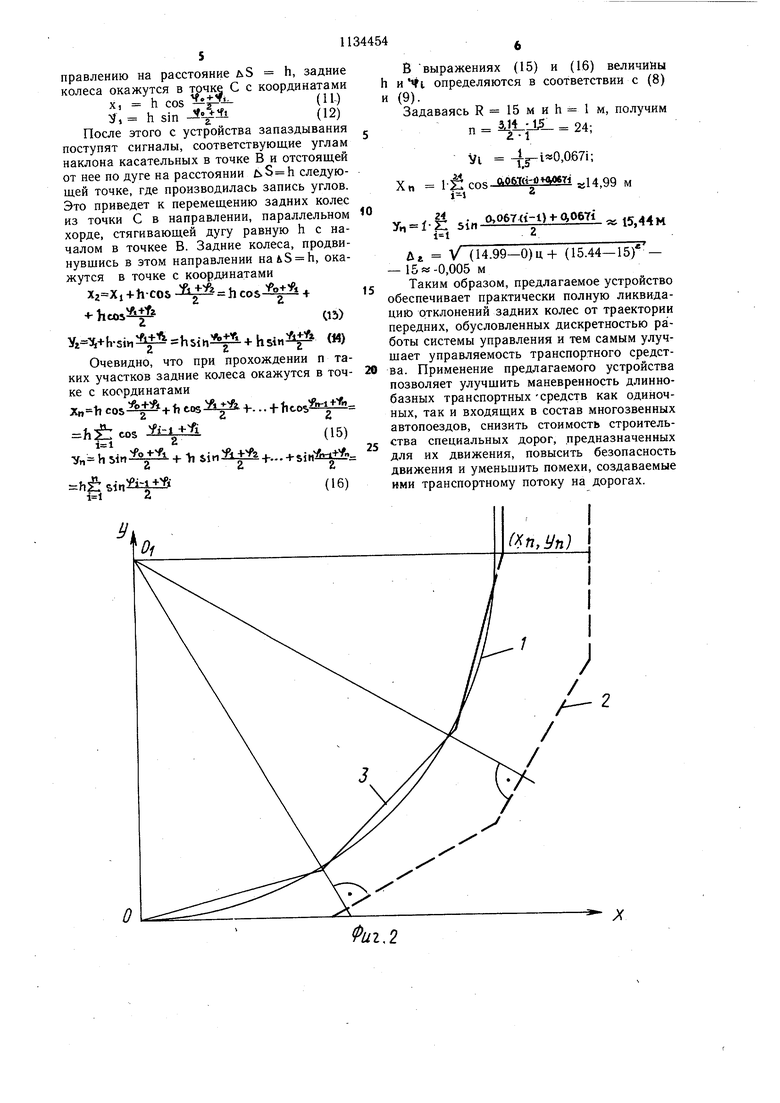
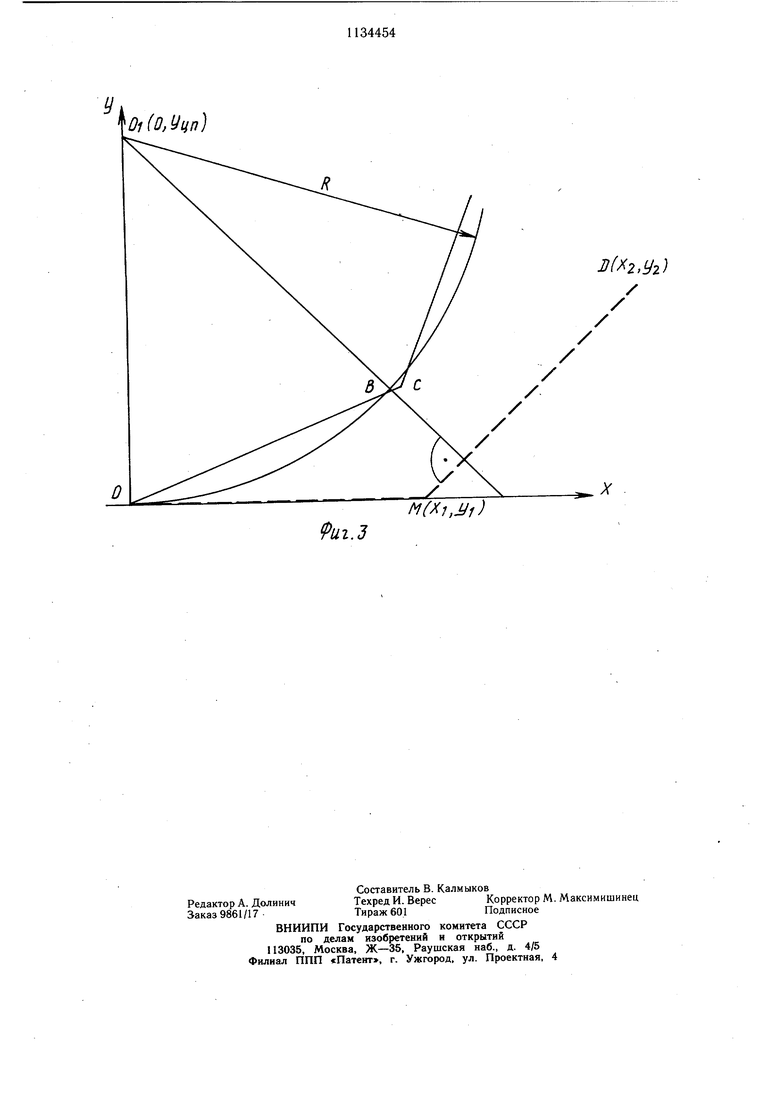
На фиг. 1 показана общая блок-схема устройства управления поворотом транспортного средства; на фиг. 2 - траектория движения передних управляемых колес при круговом повороте (1), траектория движения задних управляемых колес при управлении устройством прототипом (2) и траектория движения задних колес при управлении предлагаемым устройством (3); на фиг. 3 -
траектории при передвижении задних колес от точки начала поворота на расстояние AS h.
Передние колеса 1 соединены с датчиком 2 угла поворота, соединенным с одним из входов сумматора 3 углов, второй вход которого соединен с датчиком 4 угла поворота рамы 5 звена. Выход сумматора 3 углов соединен с блоком записи 6, выполненным подвижным относительно носителя информации 7 устройства 8 запаздывания, блоки считывания 9 и 10, которые выполнены также подвижными относительно носителя информации, соединены со входами блока 11 вычисления средних значений, выход которого соединен с одним из входов сумматора 12 углов, второй вход которого соединен с датчиком 4 угла поворота рамы, а выход - с приводом 13 задних управляемых колес 14 транспортного средства. Устройство снабжено датчиком 15 пути, проходимого передними колесами, соединенным с приводом 16
5 блок 26 записи, а также датчиком 17 пути, проходимого задними колесами, соединенным с приводом 18 блоков 9 и 10 считывания.
Устройство работает следующим образом.
При входе транспортного средства в поворот датчик 2 фиксирует угол поворота передних колес 1 относительно рамы 5 и посылает сигнал на один из входов сумматора 3 углов. Датчик 4 фиксирует угол поворота рамы 5 в горизонтальной плоскости и посылает сигнал на второй вход сумматора 3 и на вход сумматора 12. Сумматор 3 алгебраически складывает сигналы, поступающие на его входы. При перемещении
Q передних колес 1 на отрезок пути AS h датчик 15 вырабатывает сигнал, который подается на привод 16 блока записи и вызывает перемещение блока записи на очередную ячейку носителя информации 7 и запись в нее значения суммарного угла,
5 снимаемого в данный момент времени с выхода сумматора 3. При перемещении задних колес на отрезок пути AS h датчик 17 вырабатывает импульс, который подается на привод 18 перемещения блоков считывания 9 и 10 и перемещает их на очередные ячейки носителя информации. При продвижении задних колес 14 в точку, где передние начали поворот, блок считывания 9 выдает сигнал, соответствующий значению угла поворота передних колес 1, когда они находились в данной точке пути на один из входов блока 11 вычисления средних значений, а блок считывания 10 выдает сигнал, соответствующий углу поворота передних колес, когда они находились в следующей точке пути, отстоящей от первой на расстоянии 45 h, где осуществлялась запись сигнала, на второй вход блока 11 вычисления средних значений. Блок 11 вычисления средних значений формирует сигнал, равный среднему значению входных сигналов и соответствующий углу наклона касательной траектории передних колес в точке, расположенной между двумя соседними точками считывания (данной и следующей) и выдает его в удобном для суммирования виде на второй вход сумматора 12, который алгебраически вычитает из полученного сигнала сигнал, поступающий от датчика 4. Результирующий сигнал поступает на привод 13, который поворачивает задние колеса 14 относительно рамы 5 транспортного средства, чем обеспечивается движение задних колес по направлению к следующей точке, где производилась запись и тем самым повыщается точность повторения задними колесами траектории передних. Оценим технико-экономическую эффективность предлагаемого устройства по сравнению с прототипом. Пусть транспортное средство управляется устройством, принятом за прототип, и задние колеса его подощли к точке О (фиг. 3), где передние колеса начали движение по круговой траектории радиуса R. С выхода устройства запаздывания в этом- случае поступает сигнал, соответствующий углу наклона касательной к этой траектории в точке О, т. е. равный О, и задние колеса продвинутся по направлению касательной на расстояние ОМ h. Координаты точки М определяются выражениями Xt h-cos /о h cosO h(1) h-sin fo h sinO 0(2) По достижении задними колесами точки М с выхода устройства запаздывания поступит сигнал, соответствующий углу наклона касательной к траектории переднего колеса в точке В, отстоящей от точки О по дуге окружности на расстоянииД5 h. Величина этого угла оп{)еделяется соотношением Yi Задние колеса из точки М продвинутся по направлению, определяемому углом на расстояние h и окажутся в точке D, координаты которой определяются выражениямиХг XI + h-cos fi h + h-cos -J- (4) tij tJi-f h-sin ti 0 + h sin -V-(5) Очевидно, что при прохождении n участков, каждый из которых равен h, координаты задних колес определяются выражениями Хп h tosfo-f h-cosfi+.. cosfn-i -h-g C05Vi i Ун 1151пУд 1-h-5infii-...i-Hsinfn-t ftg 5infi, Р повороте на 90 количество отрезков AS h, укладывающихся на длине поворота, определится формулой n . (8) а значение угла, снимаемого в i-и точке с устройства запаздывания, определится следующим выражением н -Vi() Отклонения задних колес от траектории передних определяются соотнощением (Хц-Хцп)+(Уп-Уч11) -R 00) где Хчрт и - координаты центра поворота. При радиусе поворота 15 м и AS h 1 м, ХКР 0,-чп R 15 м. Тогда .H-i n -2Ti -24 , ,067i , Х„ COS 0,06rfl-l)« 15.5H Уп 1-р Sin 0,06T(i-l) «J H.SSM Al V(l5.5-0)-t-(H.5R-15)i - 15 « 0,51 M Повторяя вычисления для других значений R и h, можно убедиться, что при прохождении поворота на 90° всегда будет иметь место равенство А « 0,5h Оценим теперь при этих же условиях точность повторения задними колесами траектории передних при управлении предлагаемым устройством. Пусть задние колеса подощли к точке 0. С блоков считывания устройства запаздывани в блок вычисления среднего значения поступают сигналы, соответствующие углам наклона касательных к траектории передних колес в точках О и В. Сигнал, соответстующий среднему значению углов наклона касательных в точках О и В, после суммирования в сумматоре 12 поступит на силовой привод задних колес, который повернет их по направлению f , т. е. по направлению хорды ОВ, которая стягивает дугу ОВ h. Продвинувщись по этому направлению на расстояние uS h, задние колеса окажутся в точке С с координатами X, h cos F-b-(11) 3 h sin (12) После этого с устройства запаздывания поступят сигналы, соответствующие углам наклона касательных в точке В и отстоящей от нее по дуге на расстоянии следующей точке, где производилась запись углов. Это приведет к перемещению задних колес из точки С в направлении, параллельном хорде, стягивающей дугу равную h с началом в точнее В. Задние колеса, продвинувщись в этом направлении нал5 Ь, окажутся в точке с координатами +h-co5 .hcot. + -HjlCOi ОЬ) yi -bb-sin bsirt +hsin W) Очевидно, что при прохождении n таких участков задние колеса окажутся в точке с координатами ti tos ...-h ticos ht{ -OS (15) Vn h I, )-...H-sin fitdlv hf:stn H±:&(16) В выражениях (15) и (16) величины и 4i определяются в соответствии с (8) и (9). Задаваясь К 15миЬ 1м, получим п t-j-i - 24; Vi ,0&7i; Х« 1-Й cos ft W-/xV Ti 14 99 м i-i2 .g 5in-M6I(i:tH:M5lL« 15.44м Дг V (14.99-0)ц-f (15.44-15) - - 15 «-0,005 M Таким образом, предлагаемое устройство обеспечивает практически полную ликвидацию отклонений задних колес от траектории передних, обусловленных дискретностью работы системы управления и тем самым улучщает управляемость транспортного средства. Применение предлагаемого устройства позволяет улучщить маневренность длиннобазных транспортных -средств как одиночных, так и входящих в состав многозвенных автопоездов, снизить стоимость строительства специальных дорог, предназначенных для их движения, повысить безопасность движения и уменьщить помехи, создаваемые ими транспортному потоку на дорогах. //Z.J М(Хт,У1)
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство рулевого управления транспортного средства | 1977 |
|
SU734049A1 |
| Устройство для управления транспорт-НыМ СРЕдСТВОМ | 1978 |
|
SU809076A1 |
| Устройство для управления поворотом транспортного средства | 1982 |
|
SU1093595A1 |
| Устройство для управления колесами звеньев автопоезда | 1977 |
|
SU765083A2 |
| Устройство для управления задними колесами транспортного средства | 1989 |
|
SU1625756A1 |
| Устройство для управления поворотом ведомого звена автопоезда | 1985 |
|
SU1311989A1 |
| Устройство управления движением прицепных звеньев безрельсового транспортного средства | 1984 |
|
SU1318472A1 |
| Устройство для управления поворотом транспортного средства | 1977 |
|
SU660883A1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ МНОГОЗВЕННОГО ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2096230C1 |
| Устройство для управления поворотом ведомых звеньев автопоезда | 1976 |
|
SU652019A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОВОРОТОМ ТРАНСПОРТНОГО СРЕДСТВА по авт. св. № 660883, отличающееся тем, что, с целью улучшения управляемости транспортного средства путем повышения точности повторения траектории передних колес задними, оно снабжено датчиками пути, проходимого передними и задними колесами, а устройство запаздывания выполнено в виде носителя информации, блока записи, двух блоков считывания, подвижных относительно носителя информации, и блока вычисления среднего значения, при этом датчик пути, проходимого передними колесами, кинематически связан с передними колесами и электрически - с блоком записи, а датчик пути, проходимого задними колесами, кинематически связан с задними колесами и электрически - с блоками считывания, выходы которых соединены со входами блока вычисления среднего значения. (Л 00 4 сл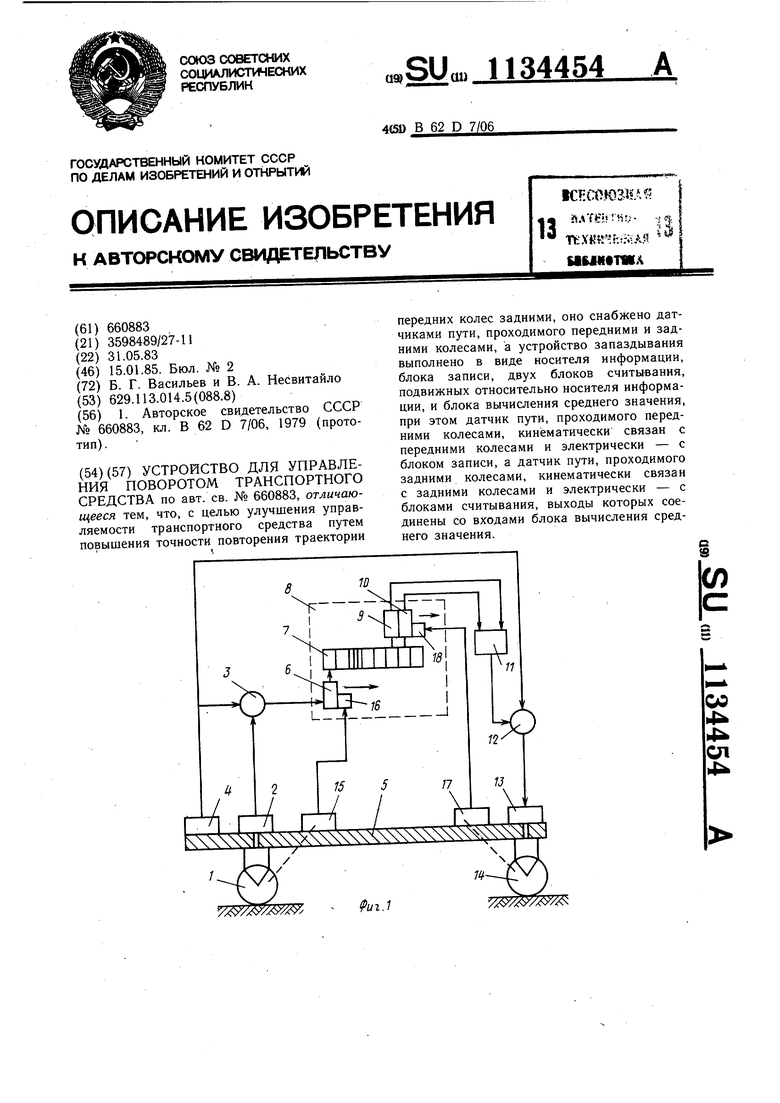
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для управления поворотом транспортного средства | 1977 |
|
SU660883A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
