о ю ел
N
ел
о
Изобретение относится к управлению транспортными средствами с передними и задними управляемыми колесами преимущественно сельскохозяйственного назначения.
Цель изобретения - повышение точности вождения.
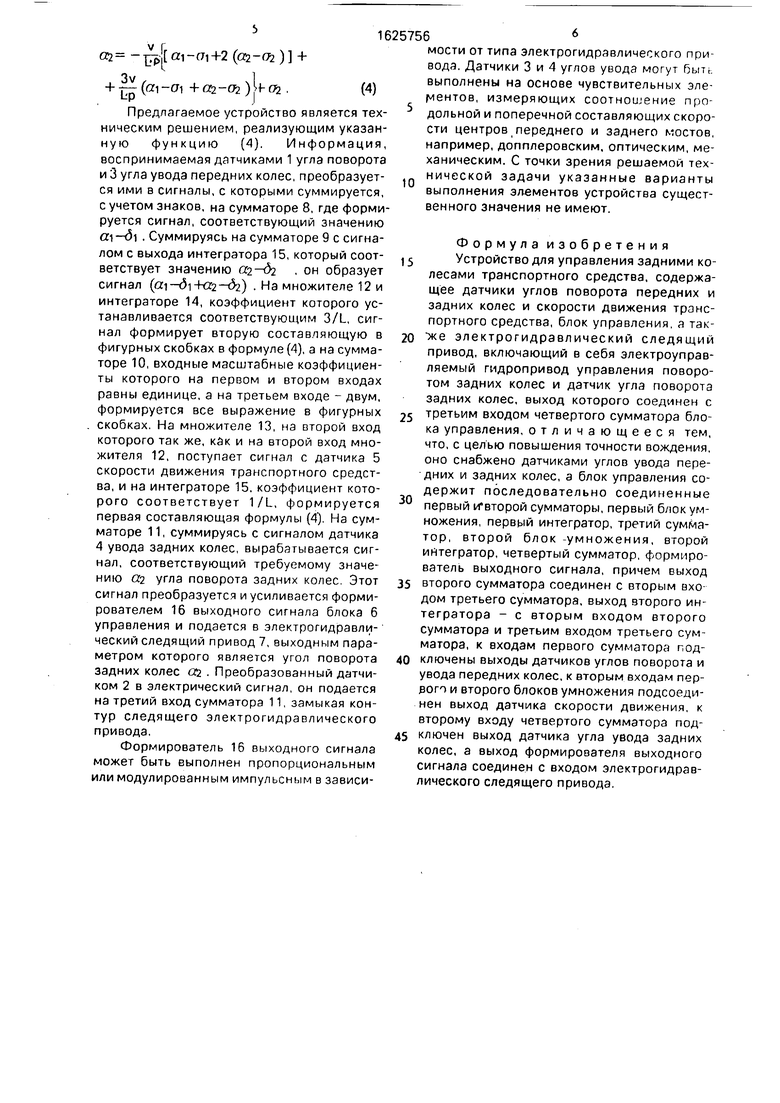
На фиг. 1 изображена функциональная схема устройства, где а и Oz угол поворота передних и задних колес, 5i и 62 углы увода передних и задних колес, v - скорость движения транспортного средства; на фиг. 2 - схема движения рассматриваемого транспортного средства, где А и В центры передних и задних колес, L - база, угол курса транспортного средства; на фиг. 3 - амплитудно-частотные характеристики (АЧХ) отклонения АВ траектории задних колес в функции пространственной частоты
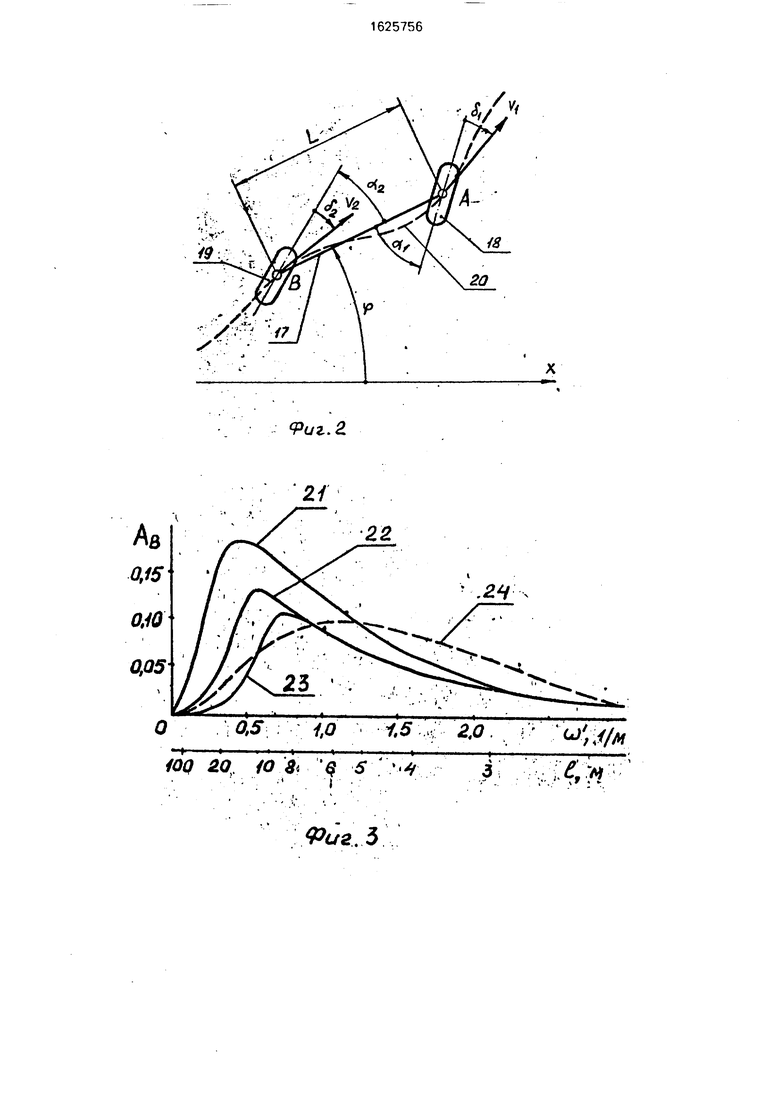
(о и длины I, соответствующей этой частоте волны; на фиг. 4 - графики траекторий задних колес при входе в поворот с прямолинейной траектории.
Устройство содержит датчики углов поворота передних 1 и задних 2 колес, датчики углов увода передних 3 и задних А колес, датчик 5 скорости движения транспортного средства, электронный блок 6 управления, электродвигательный следящий привод 7. Блок 6 управления содержит первый 8. второй 9, третий 10 и четвертый 11 сумматоры, первый 12 и второй 13 блоки умножения, первый 14 и второй 15 интеграторы, формирователь 16 выходного сигнала. Элементы 8, 9, 12, 14, 10, 13, 15, 11 и 16 соединены последовательно (выход каждого предыдущего элемента соединен с первым входом последующего) Кроме того, выход второго сумматора 9 подключен к второму входу третьего сумматора 10, а выход второго интегратора 15 - к второму входу третьего сумматора 10 и третьему входу третьего сумматора 10. К первому и второму входам первого сумматора 8 подключены выходы датчиков поворота 1 и увода 3 передних колес, Выход датчика 5 скорости движения транспортного средства подсоединен к вторым входам первого 12 и второго 13 блоков умножения. К второму входу четвертого сумматора 11 подключен выход датчика 4 увода задних колес, а к его третьему входу - выход датчика 2 угла поворота задних колес. Выход формирователя 16 выходного сигнала соединен с входом электрогидравлического следящего привода 7.
Транспортное средство рассмотрим в виде упрощенной двумерной модели велосипедной схемы содержащей (фиг. 2) раму 17 и соединенные с ней шарнирно в точках А и В передние 18 и задние 19 эластичные
5
колеса, центры которых совпадают в проекции на плоскость OXY с точками соответственно А и В и движутся по одной траектории 20.
В качестве оценок отклонения траектории задних колес от траектории передних колес использованы АЧХ 21 устройства с передними поворотными и задними неповоротными колесами, АЧХ 22, потенциально соответствующая прототипу, АЧХ 23 предлагаемого устройства и АЧХ 24 устройства с противофазно-синхронно поворотными колесами, например,транспортного средства с шарнирно сочлененной рамой (фиг. 3),
Кроме того, использовались оценки отклонений траектории задних колес от траектории передних колес аналога - график 25, прототипа - график 26, предлагаемого устройства - график 27, устройства с передни0 ми поворотными и задними неповоротными колесами - график 28, устройства с противофазно-синхронно поворотными колесами - график 29 (фиг. 4) при переходе с прямоли- . нейной траектории к повороту транспортно5 го средства, с минимальным радиусом.
Устройство работает следующим образом.
Для того, чтобы траектория задних колес совпадала с траекторией передних ко0 лес, необходимо, чтобы координаты точки В (фиг.2) совпадали с координатами точки А, через время запаздывания т L/v, необходимое для передвижения транспортного средства на длину его базы, или выполнение
г условий
ХВ ХА-е
-г-р
JB JA-G
-т-р
(1)
где, р - оператор дифференцирования,
-г-р е- функция чистого запаздывания,
Анализ этой задачи дает точное решение, близкое к решению аналога:
-т-р
«2(ai- Si4yj)e .(2)
Разлагая функцию частого запаздывания в степенной ряд и ограничиваясь тремя членами разложения
.р+(Гр)2/2-г(г.Р)3/бГ1 . приу У л-йт-ф-нЗг)/ L-.P , и учитывая,
итг Т- I Л/ ПППХУЧЯЮТ
(3)
что Т L/v, получают
«2 -W(p) «1+&
55 где W(p)(- Р+1 )
-1
функция динамического запаздывания или, в виде, удобном для реализации
02 - Jjp; «1 -CTl +2 (OS-02 ) 1 +
+ (oti-ai + 02-02 )foi.
Предлагаемое устройство является техническим решением, реализующим указанную функцию (4). Информация, воспринимаемая датчиками 1 угла поворота и 3 угла увода передних колес, преобразуется ими в сигналы, с которыми суммируется, с учетом знаков, на сумматоре 8, где формируется сигнал, соответствующий значению . Суммируясь на сумматоре 9 с сигналом с выхода интегратора 15, который соответствует значению ai-62 , он образует сигнал (at-6 +а.2 -&) На множителе 12 и интеграторе 14, коэффициент которого устанавливается соответствующим 3/L, сигнал формирует вторую составляющую в фигурных скобках в формуле (4), а на сумматоре 10, входные масштабные коэффициенты которого на первом и втором входах равны единице, а на третьем входе - двум, формируется все выражение в фигурных скобках. На множителе 13, на второй вход которого так же, как и на второй вход множителя 12, поступает сигнал с датчика 5 скорости движения транспортного средства, и на интеграторе 15, коэффициент которого соответствует 1/L, формируется первая составляющая формулы (4). На сумматоре 11, суммируясь с сигналом датчика 4 увода задних колес, вырабатывается сигнал, соответствующий требуемому значению Ог угла поворота задних колес. Этот сигнал преобразуется и усиливается формирователем 16 выходного сигнала блока 6 управления и подается в электрогидравлический следящий привод 7, выходным параметром которого является угол поворота задних колес cci . Преобразованный датчиком 2 в электрический сигнал, он подается на третий вход сумматора 11, замыкая контур следящего электрогидравлического привода.
Формирователь 16 выходного сигнала может быть выполнен пропорциональным или модулированным импульсным в зависи
10
15
20
25
30
35
40
4S
мости от типа электрогидравлического привода. Датчики 3 и 4 углов увода могут бытч выполнены на основе чувствительных элементов, измеряющих соотношение продольной и поперечной составляющих скорости центров переднего и заднего мостов, например, допплеровским, оптическим, механическим. С точки зрения решаемой технической задачи указанные варианты выполнения элементов устройства существенного значения не имеют.
Формула изобретения Устройство для управления задними колесами транспортного средства, содержащее датчики углов поворота передних и задних колес и скорости движения транспортного средства, блок управления, а также электрогидравлический следящий привод, включающий в себя электроуправ- ляемый гидропривод управления поворотом задних колес и датчик угла поворота задних колес, выход которого соединен с третьим входом четвертого сумматора блока управления, отличающееся тем, что, с целью повышения точности вождения, оно снабжено датчиками углов увода передних и задних колес, а блок управления содержит последовательно соединенные первый и второй сумматоры, первый блок умножения, первый интегратор, третий сумматор, второй блок -умножения, второй интегратор, четвертый сумматор, формирователь выходного сигнала, причем выход второго сумматора соединен с вторым входом третьего сумматора, выход второго интегратора - с вторым входом второго сумматора и третьим входом третьего сумматора, к входам первого сумматора подключены выходы датчиков углов поворота и увода передних колес, к вторым входам первого и второго блоков умножения подсоединен выход датчика скорости движения, к второму входу четвертого сумматора подключен выход датчика угла увода задних колес, а выход формирователя выходного сигнала соединен с входом электрогидравлического следящего привода.
,.
к 2
I,.
ь r s &, 8 о/ Ъъ toot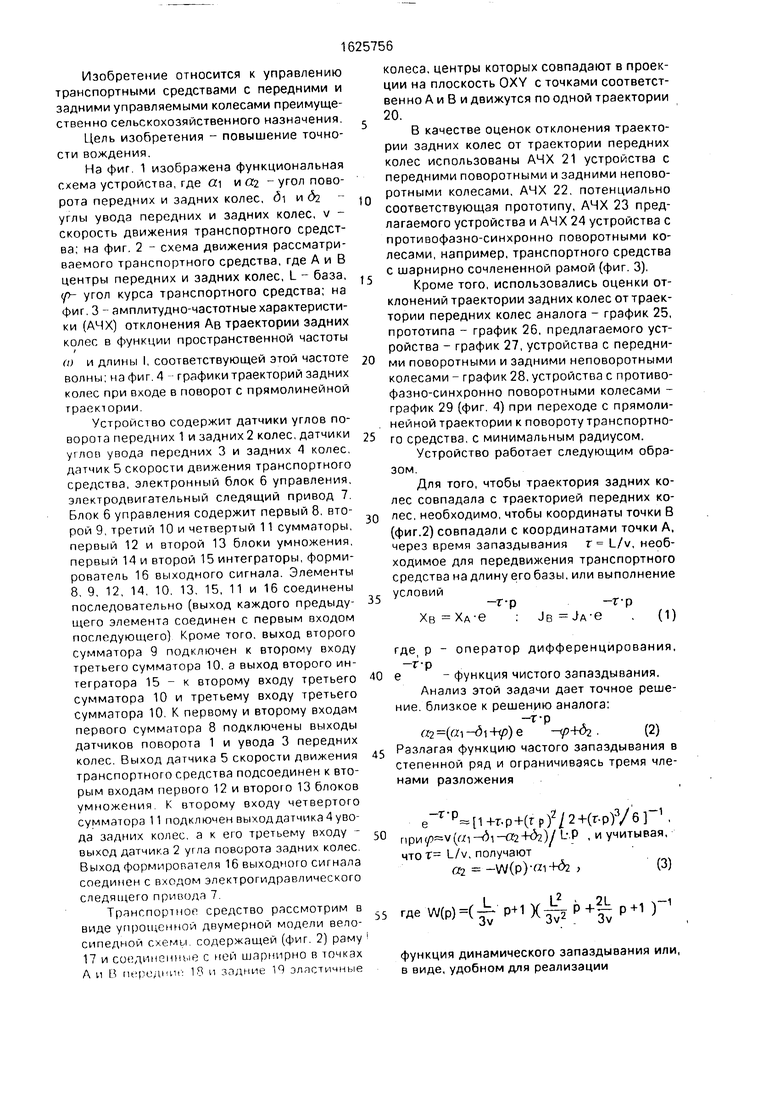
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления транспорт-НыМ СРЕдСТВОМ | 1978 |
|
SU809076A1 |
| Устройство для управления поворотом транспортного средства | 1982 |
|
SU1093595A1 |
| Устройство автоматической коррекции траектории движения колесного транспортного средства | 1980 |
|
SU933525A1 |
| Устройство для исследования управляемости и устойчивости движения транспортного средства | 1988 |
|
SU1643980A1 |
| Способ управления движением активного многозвенного транспортного средства и устройство для его осуществления | 1982 |
|
SU1094790A1 |
| Система регулирования характеристики подвески транспортного средства | 1991 |
|
SU1794699A2 |
| Устройство рулевого управления транспортного средства | 1977 |
|
SU734049A1 |
| Устройство для измерения бокового сноса транспортного средства | 1977 |
|
SU732967A1 |
| Устройство для управления транспортным средством | 1989 |
|
SU1740211A1 |
| Система автоматического управления траекторным движением транспортного средства с функцией курсовой устойчивости | 2019 |
|
RU2724008C1 |
Изобретение предназначено для управления транспортными средствами с передними и задними управляемыми колесами, преимущественно сельскохозяйственного назначения. Цель изобретения - повышение точности вождения. Устройство содержит датчики углов поворота и увода передних 1 и задних 2 колес, скорости 5 движения транспортного средства, электронный блок 6 управления, электрогидравлический следящий привод 7. Подаваемые с датчиков углов поворота и увода передних 1 и задних 2 колес сигналы преобразуются в электрические сигналы и подаются в электронный блок 6 управления, обеспечивающий корректировку курса движения транспортного средства. 4 ил. 1 со С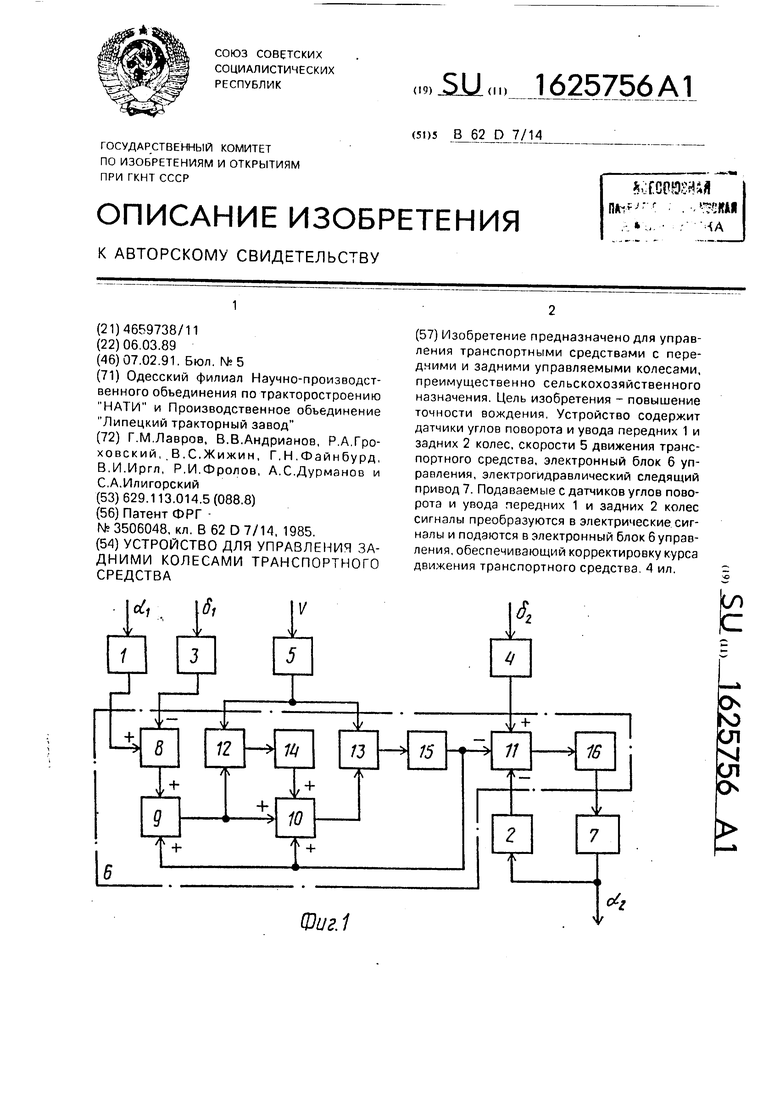
. -/ :- P о /
a
i
c6
99Л9291
Фиг,/
| Патент ФРГ - № 3506048, кл | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
