rf
:лэ :д со сд
Изобретение относится к автомоби лестроению, в частности к устройствам для управления поворотом транспортного средства как одиночного, так и входящего в состав многозвенного автопоезда.
Известно устройство, содержащее датчик поворота передних колес, запоминающее устройство,привод управления задними колесами, датчик угла поворота соединительной рамы относительно задней колесной тележки и реле , соединяющее привод поворота управляющих колес задней тележки при повороте со считывающим элементом за поминающего устройства, а при прямо|Линейном движении - с датчиком угла поворота соединительной рамы относительно задней тележки tl.
Недостатком данного устройства является то, что оно неприменимо как для управления задними колесами на повороте, так и для стабилизации дви.жения На прямолинейном участке таких автотранспортных средств, колеса которых поворачиваются относительно рамы, а не объединены в независимую переднюю и заднюю тележки, как в предлагаемом устройстве.
Известно также устройство для управления поворотом транспортного средства, содержащее датчики угла поворота передних управляемых колес и рамы, силовой следящий привод задних управляемых колес, блоки запаздывания и сумматоры, один из входов которого соединен с датчиком угла поворота рамы, вход другого - с датчиками угла поворота рамы и передних колес, а выход - с входом блока запаздывания, соединенным выходом с вторым входом первого сумматора 2.
Недостатком известного устройства является то, что в реальных условиях эксплуатации транспортного средства оно не обеспечивает точное движение задних колес по траектории движения передних колес на повороте, а после прохождения поворота возникшие смещения задних колес относительно траектории движения передних колес не уменьшаются на прямолинейном участке движения передних колес. Указанные смещения задних колес на повороте возникают из-за неточности работы устройства для управления поворотом, а также наличия неучтенных факторов (бокового увода эластичных шин, проскальзывания и юза колес и других . В свою очередь,появление смещения задних колес приводит к ошибкам в осуществлении задержки сигнала.
Целью изобретения является улучшение управляемости путем уменьшения рассогласования траекторий движения передних и задних колес транспортно-j
го средства на прямолинейном участке пути.
Указанная цель достигается тем, что устройство для управления поворотом транспортного средства, содер5 жащее датчики угла поворота передних управляемых колес и рамы, силовой следящий привод задних управляемых колес, блоки запаздывания и сумматоры, один из входов которого соединен 10 с датчиком поворота рамы, вход другого - с датчиками угла поворота рамы и передних колес, а выход - с входом блока запаздывания, соединенным выходом с вторым входом первого 5 сумматора, снабжено ключами, логическим элементом НЕ, блоком сравнения, входы которого соединены с выходом второго сумматора и выходом блока запаздывания, а выход - с входом логического элемента НЕ и с управляющим входом первого ключа, сигнальный вход которого соединен с выходом первого сумматора, выход которого соединен с силовым следящим приводом задних управляемых колес, выход логического элемента НЕ соединен с управляющим входом второго ключа, сигналЬ ный вход которого связан с датчиком угла поворота передних управляемых колес, а выход - с силовым следящим
0 приводом задних управляемых колес.
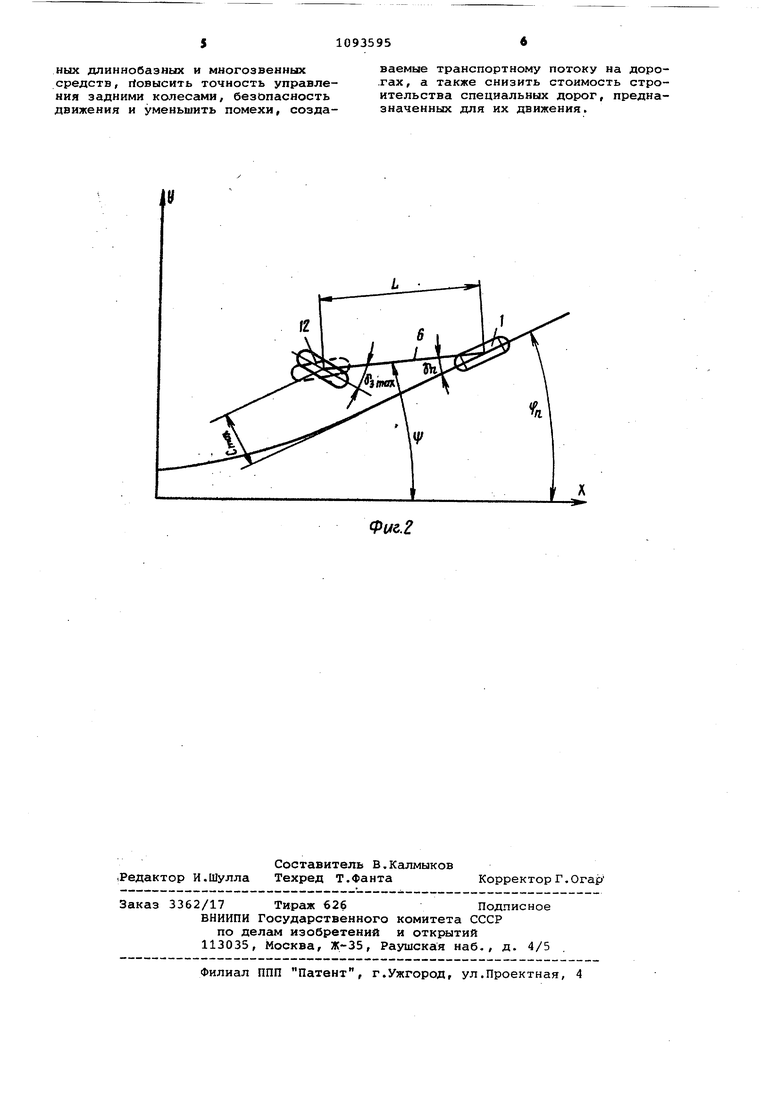
На фиг. 1 изображена функциональная блок-схема устройства для управления поворотом транспортного средства; на фиг. 2 - схема движения транс5 портного средства после прохождения поворота на прямолинейном участке пути.
Передние колеса 1 соединены с дат0 иком 2 угла поворота, соединенным с входом усилителя 3 и с одним из входов сумматора 4 углов, второй вход которого соединен с датчиком 5 угла поворота рамы 6 транспортного
средства. Выход сумматора 4 углов соединен с входом блока 7 запаздывания и первым входом блока 8 сравнения. Выход блока 7 запаздывания соединен с вторым входом блока 8 сравнения и одним из входом сумматора 9 углов, второй вход которого соединен с датчиком 5 угла поворота рамы 6, а выход - с сигнальным входом ключа 10, выход которого соединен с силовым следящим приводом 11 поворота
5 задних управляемых колес 12 транспортного средства. Выход блока 8 сравнения соединен с управляющим входом ключа 10 и с входом логического элемента НЕ 13, выход которого соединен
0 с управляющим входом ключа 14, сигнальный вход которого соединен с выходом усилителя 3, а выход - с силовым следящим приводом 11 задних управляемых колес 12 транспортного
5 средства.
Устройство работает следующим образом.
Датчик 2 угла поворота фиксирует угол поворота Уп передних колес 1 относительно рамы 6 и посылает сигнал на один из входов сумматора 4 углов и вход усилителя 3. Датчик 5 фиксирует угол V поворота рамы относительно земли в горизонтальной плос кости и посылает сигнал на второй вход сумматора 4 и на вход сумматора 9. Сумматор 4 алгебраически складывает сигналы, поступающие на его входы, и посылает суммарный сигнал у+у в устройство запаздывания и на первый вход блока 8 сравнения. После прохождения задними колесами 12 пути запаздывания до передних колес блок 7 запаздывания выдает сигнал Чп С на второй вход блока 8 сравнения и на второй вход сумматора 9 углов, который алгебраически вычитает из полученного сигнала Чп (t) сигнал V , поступающий от датчика 5. При движении транспортного средства по криволинейной траектории сигнал Ч на первом входе блока 8 сравнения не равен сигналу (f) на втором входе блока сравнения, так .как они представляют собой углы наклона касательной к криволинейной траектории в различных ее точках. Поэтому сигнал на выходе блока 8 сравнения отличен от нуля, что вызывает открытие ключа 10 и приводит к появлению нулевого сигнала на выходе логического элемента НЕ 13. Равенство нулю сигнала на выходе логического элемента НЕ 13 вызывает запирание ключа 14. В результате этого результирующий сигнал f3 %(f)-V из сумматора 9 через ключ 10 поступает в силовой следящий привод 11, который поворачивает задние управляемые колеса 12 относительно рамы 6 транспортного средства на соответствующий угол.
При движении по прямолинейному участку траектории сигналы на обоих входах блока 8 сравнения равны, поэтому сигнал на выходе блока 8 сравнения становится равным нулю, что приводит к запиранию ключа 10 и появлению сигнала, отличного от нуля, на входе логического элемента НЕ 13 Сигнал, поступающий с выхода логического элемента НЕ 13, открывает ключ 14. При этом сигнал от датчика 2 поступает на вход усилителя 3, который изменяет его знак и значение в соответствии с зависимостью
, (
где k - коэффициент усиления усилителя 3. Затем сигнал через открытый ключ 14 подается на силовой следящий привод 11 поворота задних колес 12, который поворачивает задние колеса в сторону прямолинейного участка траектории передних колес на угол,, пропорциональный углу поворота передних колес относительно рамы. Причем угол поворота колес зависит от величины коэффициента усиления усилителя 3, величина которого должна находиться в пределах от нуля до некоторого максимального значения 1. .
При равенстве нулю коэффициента усиления усилителя задние колеса 12 (фиг. 21 транспортного средства поворачиваются силовым следящим приводом вдоль рамы б транспортного средства (пунктирная линия К При дальнейшем движении смещение, которое, например, в начальный момент после выхода задних колес на участок прямолинейного движения имеет максимально возможное значение С , уменьшается, как у транспортных средств с неповоротными колесами.
Указанные смещения уменьшаются быстрее при повороте задних колес в сторону, противоположную повороту передних колес относительно рамы, причем тем быстрее, чем больше угол а, следовательно, и коэффициент усиления k . В данном случае максимальное значение 1 определяется из условия, когда задние колеса выходят на прямолинейный участок со смещением, равным и устройство поворачивает их на максимально возможный угол тГз max Величина угла поворота передних колес относительно рамы определяется по формуле
:2
tarcsin
Тп
где L - база транспортного средства Тогда максимальная величина коэффициента усиления усилителя определяется из формулы (1) как
i-t Д 3 тал
mcix
moix «resin -j--
Такимобразом, дополнительные (по сравнению с известным устройством| элементы, введенные в предлагаемое устройство, и их связи в совокупности позволяют определить в процессе движения транспортного средства прямолинейный участок пути и обеспечивают такое управление поворотом транспортного средства на этом участке, при котором имеющиеся смещении задни колес относительно траектории передних колес непрерывно уменьшаются, что обеспечивает достижение поставленной цели.
Улучшение управляемости транспортного средства путем уменьшения рассогласования траектории движения передних и задних колес транспортного средства на прямолинейном участке пути, достигаемое при использовании предлагаемого устройства, позволяет улучшить маневренность большегрузных длиннобаэных и многозвенных средств, йовысить точность управления задними колесами, безопасность движения и уменьшить помехи, создаваемые транспортному потоку на доро.гах, а также снизить стоимость строительства специальных дорог, предназначенных для их движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления движением прицепных звеньев безрельсового транспортного средства | 1984 |
|
SU1318472A1 |
| Устройство для управления поворотом ведомого звена автопоезда | 1985 |
|
SU1311989A1 |
| Устройство для управления задними колесами транспортного средства | 1989 |
|
SU1625756A1 |
| Устройство для управления поворотом транспортного средства | 1983 |
|
SU1134454A2 |
| Устройство для управления поворотом транспортного средства | 1977 |
|
SU660883A1 |
| Устройство рулевого управления транспортного средства | 1977 |
|
SU734049A1 |
| Устройство для управления транспорт-НыМ СРЕдСТВОМ | 1978 |
|
SU809076A1 |
| Устройство для управления поворотом ведомых звеньев автопоезда | 1976 |
|
SU652019A1 |
| Устройство для управления колесами звеньев автопоезда | 1980 |
|
SU867756A1 |
| Устройство для управления колесами звеньев автопоезда | 1977 |
|
SU765083A2 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ . ПОВОРОТОМ ТРАНСПОРТНОГО СРЕДСТВА, содержащее датчики угла поворота передних управляемых колес и рамы, силовой следящий привод задних управляемых колес, блоки запаздывания и сумматоры, один из входов которого соединен с датчиком угла поворота рамы, вход другого - с датчиками угла поворота рамы и передних колес, а выход - с входом блока запаздывания, соединенным выходом с вторым входом первого сумматора, о т л и чающееся тем, что, с целью улучшения управляемости путем уменьшения рассогласования траекторий движения передних и задних колес транспортного средства на прямолинейном участке пути, оно снабжено ключами, логическим элементом НЕ, блоком срав нения, входы которого соединены с выходом второго сумматора и выходом блока запаздывания, а выход - с входом логического элемента НЕ и с управляющим входом первого ключа, сигнальный вход котброго соединен с выходом первого сумматора, выход которого соединен с силовым следящим приводом задних уп- § равляемых колес, выход логического (Л элемента НЕ соединен с управляющим входом второго ключа, сигнальный вход которого связан с датчиком угла поворота передних управляемых колес, а выход - с силовым следящим приводом задних управляемых колес..
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Рулевое управление прицепных звеньев безрельсового транспортного средства | 1975 |
|
SU554180A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления поворотом транспортного средства | 1977 |
|
SU660883A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
