(54) УСТРОЙСТВО УРАВНОВЕШИВАНИЯ КРИВОШИПНОШАТУННОГО МЕХАНИЗМА
1
Изобретение относится к машиностроению и может быть использовано, например, в импульсных вариаторах.
Наиболее близким по технической сущности к изобретению является устройство уравновешивания кривошипно-шатунного механизма, содержащее кривошипный вал с противовесом и эксцентриком, установленный на нем с возможностью поворота внешний эксцентрик, шатун, подвиж-но установленный на эксцентрике, дополнитель.ный противовес, установленный с возможностью поворота вокруг оси кривошипного вала, и механизм поворота и фиксации внешнего эксцентрика 1.
Недостатком этого устройства является относительно небольшие технологические возможности вследствие отсутствия кинематической связи внешнего эксцентрика с противовесом.
Целью изобретения является расширение технологических возможностей устройства.
Указанная цель достигается тем, что устройство снабжено жестко связанным с внешним эксцентриком поводком, а на дополнительном противовесе выполнен радиальный паз, взаимодействующий с поводком.
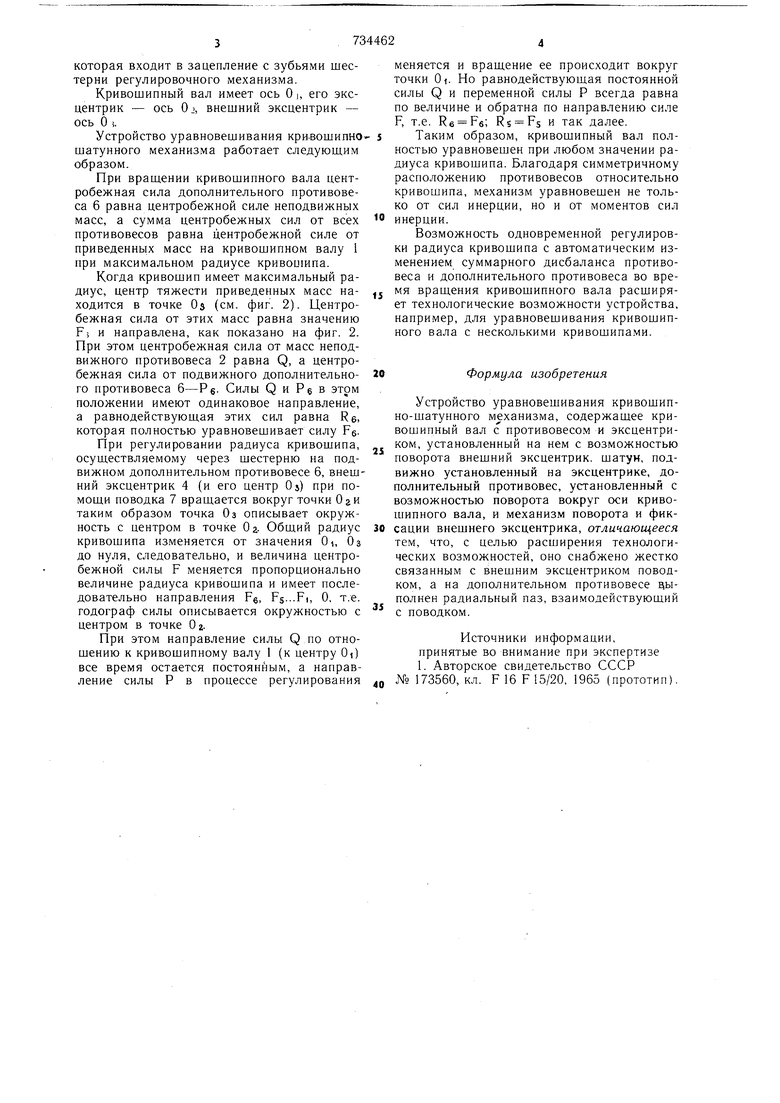
На фиг. 1 показана кинематическая схема предлагаемого устройства; на фиг. 2 - схема сил и моментов инерции.
Устройство содержит кривошипный вал 1 с противовесом 2 и эксцентриком 3, устас новленный на нем с возможностью поворота внешний эксцентрик 4, который с эксцентриком 3 образует регулируемый по длине кривошип, шатун 5, подвижно установленный на эксцентрике 3. Оно также содержит дополнительный противовес 6, установ10. ленный с возможностью поворота вокруг оси кривошипного вала 1 и, механизм поворота и фиксации (на фигурах не показан) внешнего эксцентрика 4.
Устройство снабжено жестко связанным с внешним эксцентриком 4 поводком 7, а на дополнительном противовесе 6 выполнен радиальный паз 8, взаимодействующий с поводком 7.
Дисбаланс дополнительного противовеса 20 6 равен дисбалансу противовеса 2 и совпадает с ним по направлению при максимальном радиусе кривошипа, при этом их центры тяжести совпадают и проходят через ось 0. На противовесе 6 также нарезана щестерня.
которая входит в зацепление с зубьями шестерни регулировочного механизма.
Кривошипный вал имеет ось 0|, его эксцентрик - ось Oj, внешний эксцентрик - ось О i.
Устройство уравновешивания кри-вошипношатунного механизма работает следуюшим образом.
При вращении кривошипного вала центробежная сила дополнительного противовеса 6 равна центробежной силе неподвижных масс, а сумма центробежных сил от всех противовесов равна центробежной силе от приведенных масс на кривошипном валу 1 при максимальном радиусе кривоишпа.
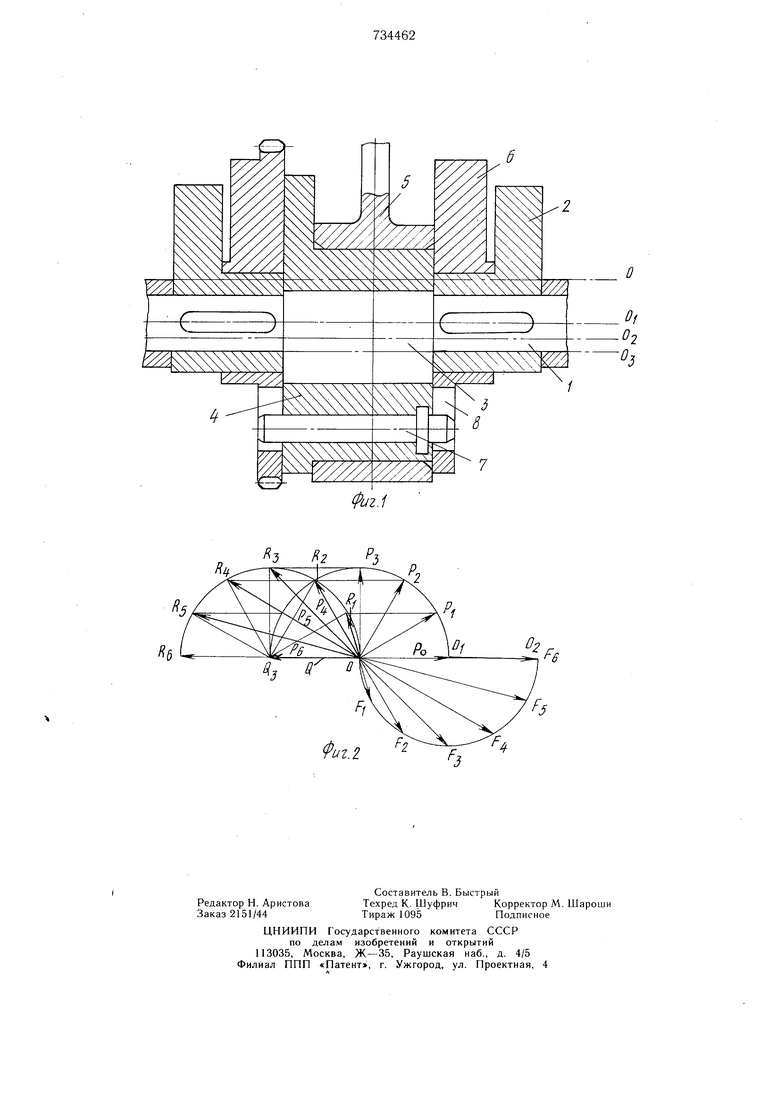
Когда кривошип имеет максимальный радиус, центр тяжести приведенных масс находится в точке Оа (см. фиг. 2). Центробежная сила от этих масс равна значению F; и направлена, как показано на фиг. 2. При этом центробежная сила от масс неподвижного противовеса 2 равна Q, а центробежная сила от подвижного дополнительного противовеса б-Рд. Силы Q и Ре в этом положении имеют одинаковое направление, а равнодействующая этих сил равна Re, которая полностью уравновешивает силу Fe.
При регулировании радиуса кривошипа, осуществляемому через шестерню на подвижном дополнительном противовесе 6, внешний эксцентрик 4 (и его центр Oj) при помоши поводка 7 вращается вокруг точки Оги таким образом точка Оз описывает окружность с центром в точке О а- Общий радиус кривошипа изменяется от значения Oi, Оз до нуля, следовательно, и величина центробежной силы F меняется пропорционально величине радиуса кривошипа и имеет последовательно направления Fg, FS...FI, О, т.е. годограф силы описывается окружностью с центром в точке О г.
При этом направление силы Q по отношению к кривошипному валу 1 (к центру Oi) все время остается постоянным, а направление силы Р в процессе регулирования
меняется и вращение ее происходит вокруг точки Oi. Но равнодействующая постоянной силы Q и переменной силы Р всегда равна по величине и обратна по направлению силе F, т.е. Re F6; R5 F5 и так далее.
Таким образом, кривошипный вал полностью уравновешен при любом значении радиуса кривощипа. Благодаря симметричному расположению противовесов относительно кривошипа, механизм уравновешен не только от сил инерции, но и от моментов сил
инерции.
Возможность одновременной регулировки радиуса кривошипа с автоматическим изменением суммарного дисбаланса противовеса и дополнительного противовеса во время вращения кривощипного вала расширяет технологические возможности устройства, например, для уравновешивания кривошипного вала с несколькими кривошипами.
Формула изобретения
Устройство уравновешивания кривошипно-шатунного механизма, содержащее кривошипный вал с противовесом и эксцентриком, установленный на нем с возможностью поворота внешний эксцентрик, шатун, подвижно установленный на эксцентрике, дополнительный противовес, установленный с возможностью поворота вокруг оси кривошипного вала, и механизм поворота и фиксации внешнего эксцентрика, отличающееся тем, что, с целью расширения технологических возможностей, оно снабжено жестко связанным с внещним эксцентриком поводком, а на дополнительном противовесе цыполнен радиальный паз, взаимодействующий
с поводком.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 40 № 173560, кл. F 16 F 15/20, 1965 (прототип)
| название | год | авторы | номер документа |
|---|---|---|---|
| Высечные ножницы | 1987 |
|
SU1530343A1 |
| Силовой агрегат | 2023 |
|
RU2826661C1 |
| Устройство для уравновешивания двигателя внутреннего сгорания | 1987 |
|
SU1467288A1 |
| Устройство уравновешивания поршневого рядного двухцилиндрового четырёхтактного двигателя внутреннего сгорания | 2023 |
|
RU2796180C1 |
| Устройство уравновешивания поршневого рядного двухцилиндрового четырехтактного двигателя внутреннего сгорания | 2022 |
|
RU2785026C1 |
| МЕХАНИЧЕСКАЯ БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 2007 |
|
RU2334143C1 |
| Учебная установка по динамике механизмов | 1989 |
|
SU1645984A1 |
| Пресс-автомат | 1985 |
|
SU1263546A1 |
| ЭКСЦЕНТРИКОВЫЙ ШАТУН | 1999 |
|
RU2178106C2 |
| Вертикальный кривошипный пресс-автомат | 1986 |
|
SU1333599A1 |
иг.1
