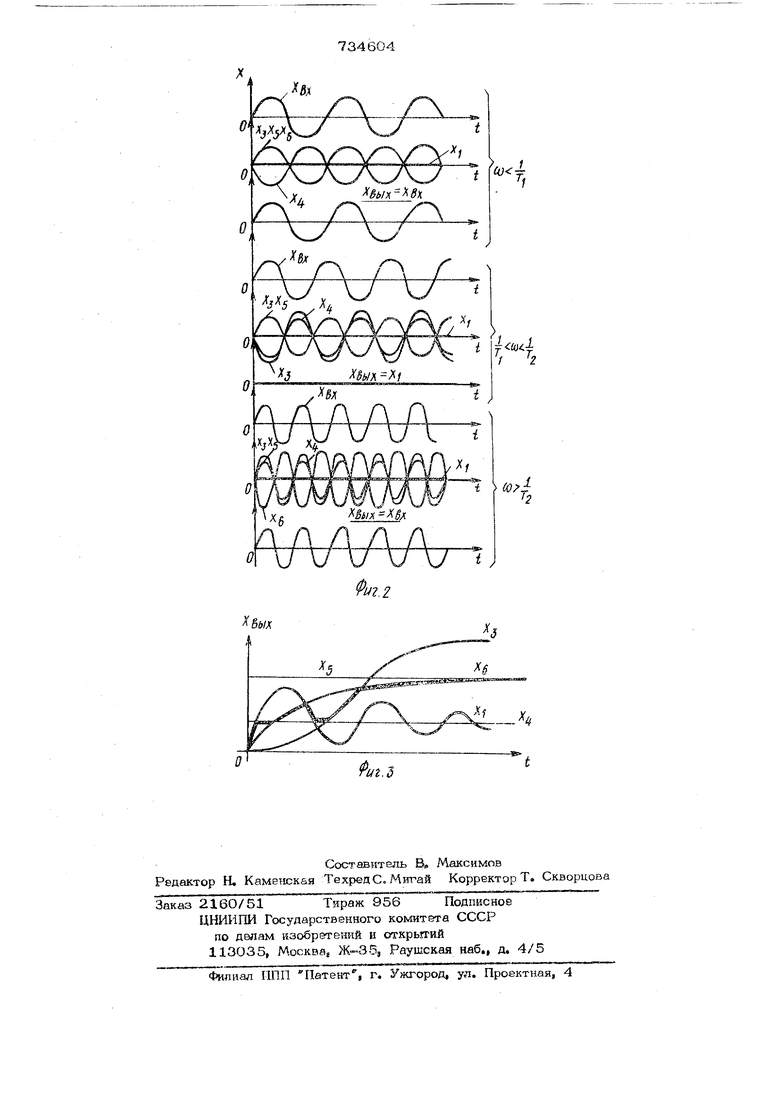
Изобретениа относится к области вычислительной тахники и автоматики и мо жет быть использовано при построении систем повышенной надежности и быстро действия. Известен способ динамической коррек ции сигналов l и нелинейное корректирующее устройство 2, основанные на принципе непрерьшного вьщеления промежуточного значения из трех скорректированных сигналов и позволяющие изменять независимо одна от другой амплитудную и фазовую составляющие частотного спек тра входного Сигнала в зоне верх.них или нижних частот. Их недостатком является то, что они не позволяют осуществлять коррекцию сигналов в ограниченной полосе частот, что ограничивает возможности увеличения коэффициента усиления систем автоматического регулирования и приводит к неполному чспользованию ач технических возможяостей. Наиболеа близким по технической сущности и достигаемому- положительнохсу эффекту к данному изобретсилю является устройство, содержащее инерционное звено, аход которого подключен к выходу мажоритарного блока, парвое безынерционное звено и isepaoe звено, обратное консервативному, входы которьк соединены с источником входных сигналов, а выходы всах звеньев соединены с соответствующими аходами мажоритарного блока З. Недостатком этого устройства является то, что оно не позволяет корректировать частотнь5е характеристики систем автоматического регулирования в диапазоне частот без внесения искажений на смежных частотах, что значительно сужает область его использования. Цепью изобрет2ния является расширение фу1жциональнь х возможностей устройства. Цепь достигается тем, что в предагаемое устройство введгиы второе безынерционное звено и второе звено, обратное консервативному, входы кото рых соединены с источником входных сигналов, а выход второго безынерционного звена и инверсный выход второго звена, обратного консервативному, соединены со входами мажоритарного блока, На фиг, 1 представлена блок-схема Предлагаемого устройства; на фиг. 2 и фиг, 3 - временные диаграммы работы устройства. Устройство содержит инерционное звено 1, вход которого подключен к выходу мажоритарного блока 2, первое безынерционное звено 3 и первое звено 4, обрат нов консервативному, выходы которых соединены с источником входных сигналов, а выходы всех звеньев соединены с соответствующими входакш мажоритарного блока 2, второе безынерционное звено 5 и второе звено 6, обратное консервативному, входы которых соединены с источником входных сигналов, а выход безынерционного звена 5 и инверсный вы ход звена 6, обратного консервативному, соединены со входами мажоритарного бло ка 2, Устройство работает следующим образом. Входной сигнал поступает на линейны звенья 3,4,5, и 6, имеющие соответстве но передаточные функции NVj , (/4 Wg и , причем NW-,, 1, 4 , VHJ5- ±1 Wfor-(T|p2 +1) иТ,Т Знаки и - в выражении передаточной фушсции ЧМ 5 соответствуют подав лению или пропусканию без искажений определенной полосы частотного спектра сигнала. Предварительно скорректирова- ные таким образом сигналы подаются на вход мажоритарного блока 2, где происходит непрерьшное вьщеление променсуточного значения из этих четырех сигналов и сигнала с выхода инерционного звена 1, на вход которого сигнал поступает с выхода мажоритарного блока 2. SieHo 1 имеет передаточную фущщию )/ - у .- , причем постоянная времени Т достаточно мала, Если корректируемый сигнал gx содержит постоянной составляющей, то выбирается из условия О Мажоритарный блок 2 преобразует сигналы 5 , ° следующему алгоритму: Xg, , N тлп (K,X,,Xj,);niitt{)(, Win (x,x,X);miM (х,с,, 0,Х.,)5Г, minC)4,X,V; д. f.Vl где Х , Хз I 44 Х5 и Хб - сигнаы на выходах звеньев 1, 3, 4, 5, соответственно. Данный алгоритм может быть реализован, например, на диодных сборках, Звено с передаточной функцией типа отличается тем, что его фазочастотная характеристика на частотах UJ - изменяется на 180, т.е, синусоидальный сигнал на выходе такого ,звена, начиная с частоты tt) г J- , находится в противсх|)азе с аходным сигналом, а амплитуда выходного сигнала начинает возрастать с наклоном ИО дб/дек, На фиг, 2 представлены временные диаграммы сигналов для трех диапазонов частот входного сигнала при )Ус - +1 и У гО . В диапазоне частот 1) - сигналы на выходах звеньев 3,5 и 6 равны входному сигналу Xg,. , Сигнал на выходе звена 4 находится в противофазе с X gy, Сигнал Х О , На выходе мажоритарного блока 2 выходной сигнал равен входному сигналу gyc-, В диапазоне частот :г- сигналы IO1-1 на выходах звеньев 3 и о равны входному сигналу, а сигналы на выходах звеньев 4 и 6 находятся в противофазе с входным сигналом. Сигнал х - о .На выходе мажоритарного блока 2 выходной сигнал 5.gj,,| равен сигналу Х . В диапазоне частот Ш сигналы на выходах звеньев 3 и 5 ртены входному сигналу, сигнал на выходе звена 6 находится в противофазе с входным сигналом К в у , а сигнал на вьсходе звена 4 совпадает по фазе с входным сигналом X в 71 «но превышает его по модулю. Сигнал Х - О , На выходе мажоритарного блока 2 выходной сигнал равен аходному сигналу X вх Тшсим образом происходит подавление полосы частот частотноТ 2.Т го спектра входного сигнала. При происходит аналогичное пропускание без искажений полосы частот. Исследование на вычислительной машине и испытания данного нелинейного корректирующего устройства в сравнении с известными показали, что устройство позволяет независимо воздействовать на модуль и аргумент спектральной плотности входного сигнала и делает возможным фильтрацию сигналов в ограниченной зоне частотного спектра, без внесения искаженийна смежных частотах, что позволяет повысить коэффициент усиления системы автоматическо го регулирования, а значит ее точность и быстродействие. Формула изобретени Нелинейное корректирующее устройство, содержащее инерционное звено, вход которого подключен к выходу мажоритарного блока, первое безынерционное звен и первое звено, обратное консервативному, входы которых соединены с источником входных сигналов, а выходы всех звеньев соединены с соответствующими входами мажоритарного блока, отличающееся тем, что, с целью расширения функциональных возможностей устройства, в него введены второе безынерционное звено и второе звено, обратное консервативному, входы которых соединены с источником входных сигналов, а выход второго безынерционного звена и инверсный выход второго звена, обрат ного консервативному, соединены со входами мажоритарного блока. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство CCXIIP № 197721, кл. G05 В 5/ОО, 1966. 2.Авторское свидетельство СХЗСР № 377725, кл. G05 В 5/01, 1970. 3.Гильбо Е. П., Чеяпанов Н. Б. Обработка сигналов на основе упорядоченного выбора, М,, Советское радио 1976, с. 292-299.

| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейное корректирующее устройство | 1979 |
|
SU866539A1 |
| Функциональное интегрирующее устройство | 1977 |
|
SU732903A1 |
| Устройство для динамических испытаний | 1977 |
|
SU736055A1 |
| НЕЛИНЕЙНОЕ КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО | 1973 |
|
SU377725A1 |
| Нелинейное корректирующее устройство для систем автоматического управления | 1978 |
|
SU752219A1 |
| Нелинейный полосовой фильтр | 1977 |
|
SU622040A1 |
| Выходное устройство для системы управления преобразователем | 1977 |
|
SU653721A1 |
| Регулятор нагрузки горной машины | 1974 |
|
SU581270A1 |
| Импульсный регулятор | 1979 |
|
SU960727A2 |
| Пропорционально-интегрально-дифференциальный регулятор для объектов с запаздыванием | 1988 |
|
SU1596304A1 |
гЛАА. luu
