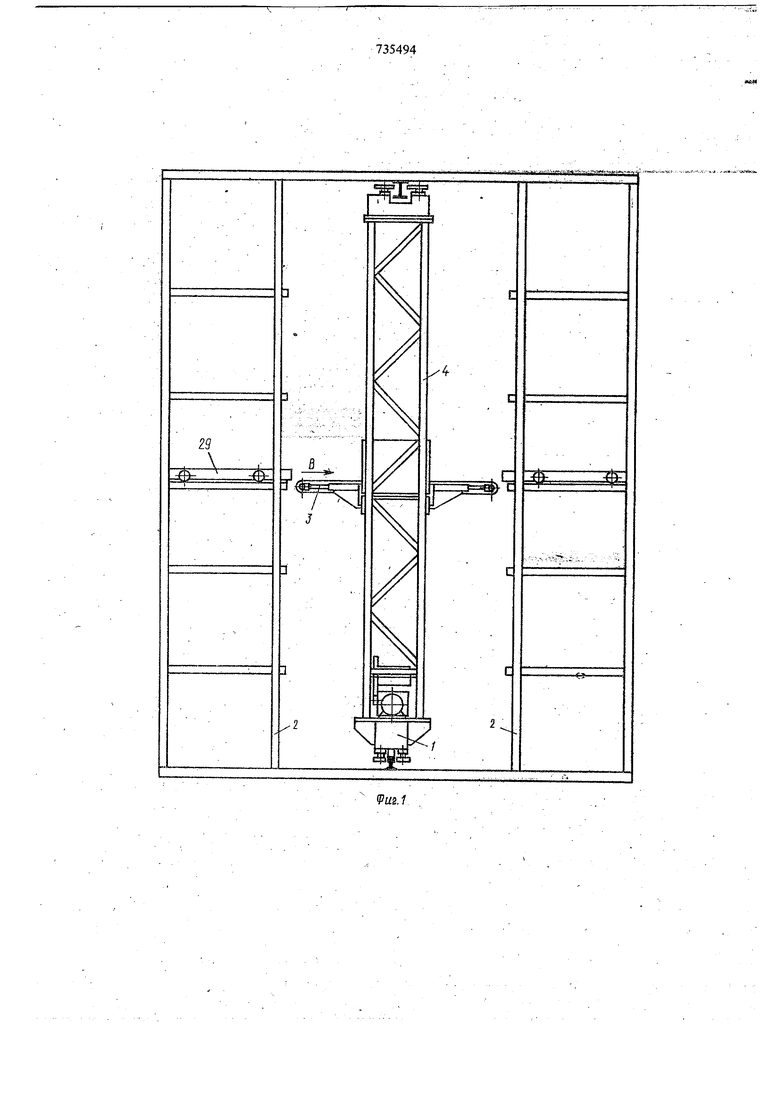
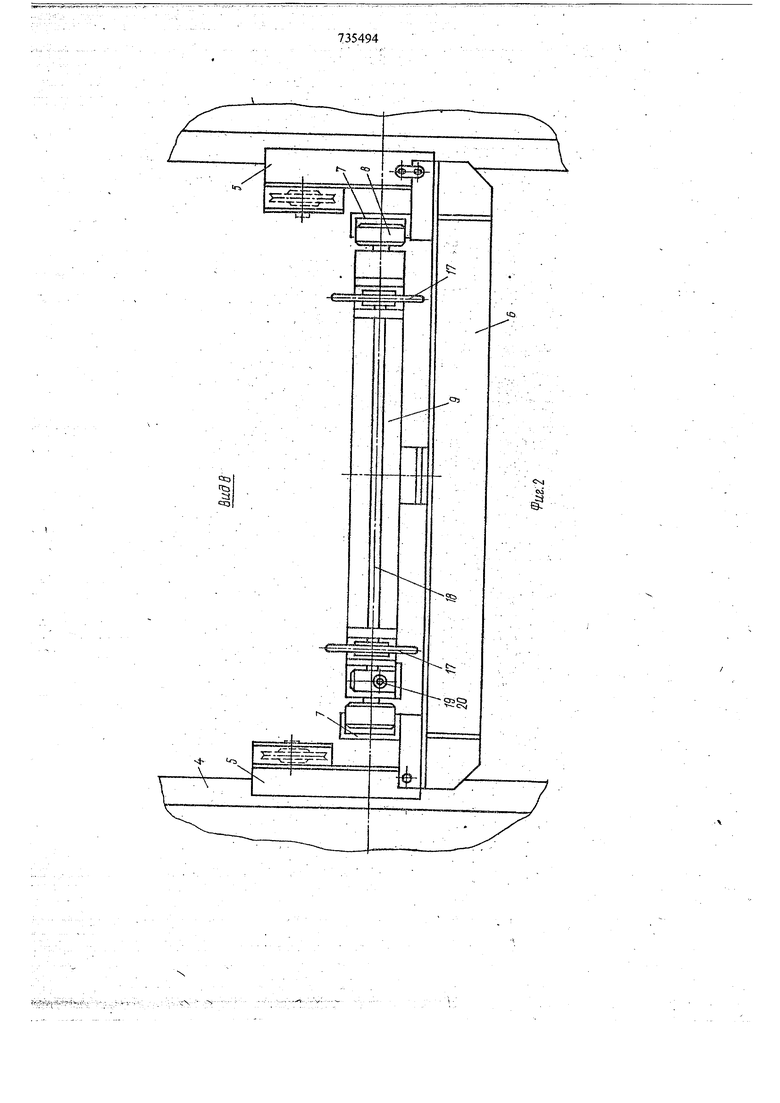
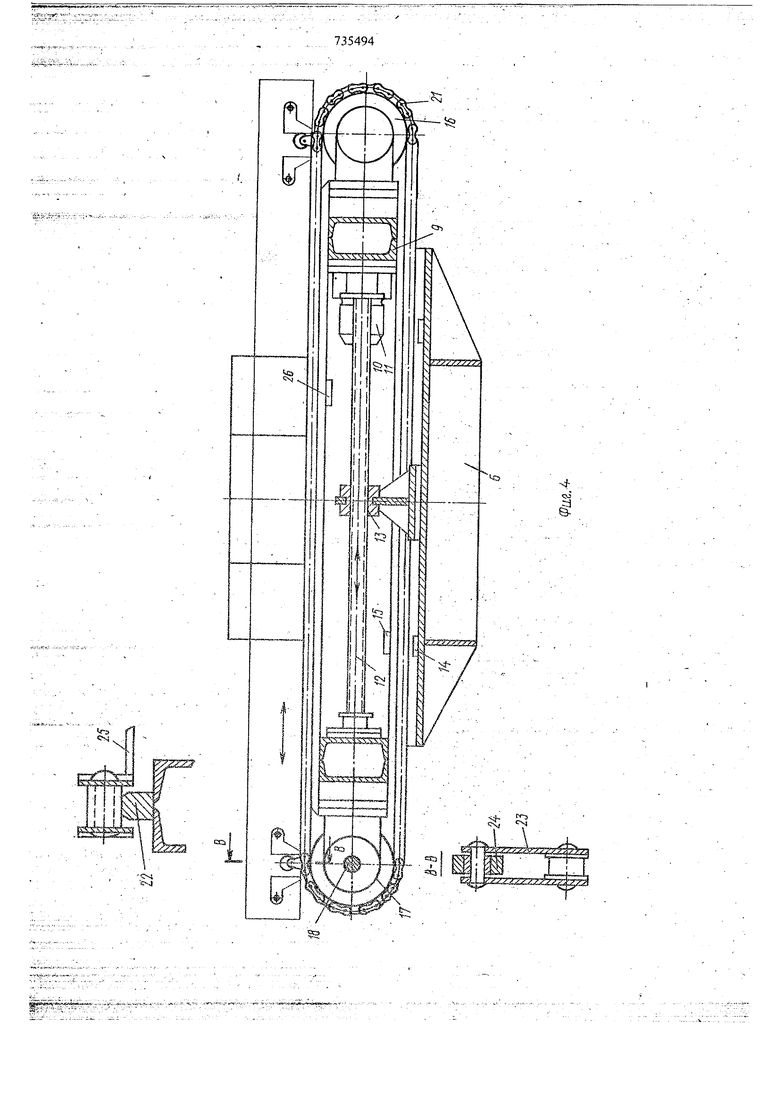
Изобретение относится к складскому хозяй ству, в частности к стеллажным сюгадам. Известен склад для хранения штучных грузов, содержащий кран- шгабелер,. установленный в проходе между многоярусными стеллажами с поддонами и снабженный выдвижной о привода грузоподъемной площадки, на которо закреплен конвейер, взаимодействующий с под доном 1 и 2, Однако конструкция известного стеллажа не позволяет снизить затраты электроэнергии при выдвижении и в движении поддонов в ст.еллаж. Цель изобретения - снижение расхода электроэнергии за счет уменьшения усилии при вдвижении и выдвижении поддонов. Это достигается тем, что конвейер грузоподъемной площадки содержит две параллельные горизонтально-замкнутые цепи, на которых закреплены ролики - захваты, а каждый поддон снабжен катками, расположенными на его боковых и нижней поверхностях, и прворотнь1ми вокруг горизонтальной оси упорами, расположенными попарно на противопол ных концах его нижней поверхности и взаимодействующими с роликами - захватами, при зтом грузоподъемная площадка снабжена направляющими для катков поддона. Кроме того, привод вьщвижения грузоподъемной площадки может содержать винтовую, пару, а расстояние между роликами - захватами может быть равно расстоянию между парами упоров, расположенных по длине поддона. На фиг. 1 показан склад,общий вид; на фиг. 2 - грузоподъемная площадка, общий вид; на фиг. 3 - поддон, общий вид с сечениями А-А и Б-Б; на фиг. 4 - грузоподъемная площадка, поперечный разрез с сечением В-В; на фиг. 5 - поддон, поперечный, разрез с сечением Г-Г на фиг, 3, Склад содержит кран - штабелер 1,уста- ь ноеленный между стеллажами 2. Кран - щтабелер снабжен грузоподъемной площадкой 3, (вмонтированной на направляющих 4 штабелера. Площадка 3 состоит из грузовых кареток 5, перемещающихся по направляющем 4 щтабелера и щарнирно-соединенных с платформой 6, на которой расположены направляющие 7. В направляющих 7 на роликах 8 перемещается рама 9 с закрепленным на. :. ней приводом 10 с-электродвигателем 11 ,й . . винтом 12 с установленной на нем плавающей гайкой 13, связаггаой с платформой 6,5 снабжешгой бесконтактными датчиками 14, взаимодействующими с пластинами 15, установленными на раме 9. Одна сторона рамы 9 снабжена холостыми звездопсами 16, а
д;ругая - звездочками 17, установленными10
на общем приводном валу 18, приводящимся в движение приводом 19 с электродвигателем ./ 20. Звездочки 16 и 17 запасованы втулочнороликовыми грузовыми цепями 21, расположёнными горизонтально и перемещающимися 15 пб направля1ощйм 22 рамы 9, На грузовых цепях 21 устаиовленб по два кронштейна 23 с роликами - захватами 24 и пластршы 25, взаимодействующиес бесконтактн ыми датчиками 26,расположенными на раме 9. РасстЬ- 20
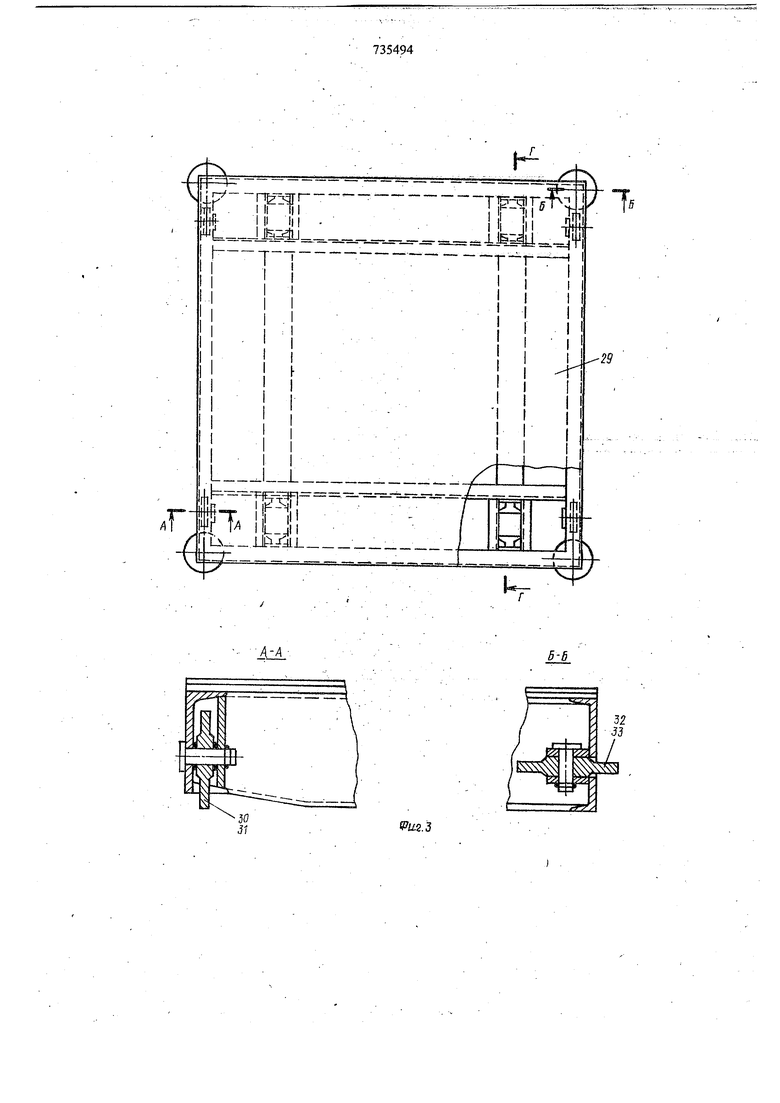
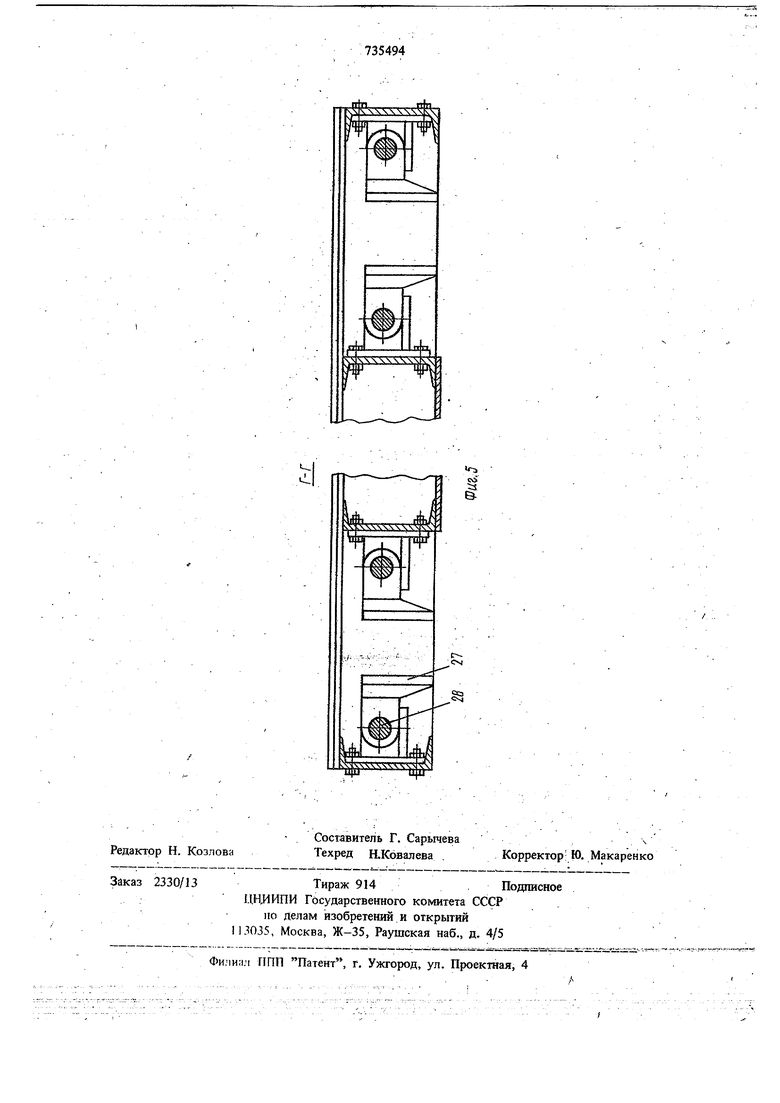
яниё между роликами-захватами 24 грузовой цепи 21 равно расстоянию между соответствуюудими храповиками 27, имеющими ось .вращения 28 и установленными на поддоне 29, в местах рарположеняя грузовых цепей 21 25 грузоподъемной гоющадки 3 щтабелера. На поддоне 29. расположены ролики 30 с горизонтальной осью вращения 31 и ролики 32 с вертикальной осью вращения 33. , Склад работает следующим образом.зо
При изготОВ1 еш1бм перемещ ении штабелераодновременно с ним вертикально ненаправляюпдам 4 перемещается грузоподъемная . площадка 3 до нужной ячейки стеллажа. Поеле. остановки штабепера и грузоподъемной 35 Ш1оц{адки 3 включается электродвигатель 11 и перемещает раму 9 в сторону поддона 29 с помощью втгтрвой пары 12-13. Бесконтакт.нь1Й .датчик 14, взаимодействуя с пластинами 15, выключает электродвигатель 11 и останав- 40 лкваёт райу 9, включая электродвигатель 20, перемещающий грузовые цепи 21. При этом ролики - захваты 24, находя циеся на кронштейнах 23, приподнимают одни и входят в зацепление с другими соответствующими45
храповиками 27 поддона 29 и перемещают последний нароликах 30 по стеллажу и на роликах грузовой цепи 21 но направляющим . 22 на грузоподъемную площадку 3. Пласти.нь 25 воздействуют на бесконтаткные дат- §6 чики 26, останавлйваютцие грузовые цепи 21 и включающие электродвигатель 11. При этом винтовая пара 12-13 перемещает 9 в . исходное положение. Бесконтактный датчик 14, взаимодействуя с пластинами 15, останав- sSШЙШ аму в исходном, положеюи и дает на горйзонтальное перемещеггае нпабелера и вертикальное - грузоподъемной площадки 3. При извлечении поддона 29 из противоположной ячейки склада рама 9 и грузовые цепи 21 перемещаются в противоположную сторону. В исходной позиции кронштейны 23 с ролика1 1И-захватами 24 находятся в нижнем положении. Загрузка-выгрузка поддона 29 с грузоподъемной площадкой 3 в СТеллажи или на приемтгую площадку возможна в обе стороны, при этом последовательность операций аналогична приведенным вьш1е, только втулошо-роликовые грузовые цепи 21 вращаются в противоположную .сторону..
Склад технологичен, не требует высокой точности при изготовлении и монтаже стеллажей, приемлем для хранения и транспортировки грузов большого, веса и габаритов на стеллажах большой высоты, удобен в работе, позволяет автоматизировать процесс складирования, совместить горизонтальное движение штабелера 1} вертикальное - грузоподъёмной площадки. . . .
.-Формула, изобретения ;. , 1. Склад Для хранения штучных грузбв, . содержащий кран-штабелер, установленньш в проходе между многоярусными стеллажами с поддонами и снабженный вьодвижной от прИводагрузоподъемной площадкой, на которой закреплен конвейер, взаимодействующий с иоддоном, отличающийся тем, что, с целькз снижения расхода электроэнергии за счет уменьще1шя усилий при вдвижении и вьщвижении поддонов, конвейер грузоподъемной площадки содержит две параллельные горизонтально-замкнутые Цепи, на которых . закреплены роЛики-захваты, а каждый лоддон снабжен катками, расноложеш1ымн на его бокBbix и, нижней поверхностях, и поворотными вокруг горизонтальной оси упорами, расположенными попарно на пр ТиврположНых концах его нижней п6верх1юсти и взаимодействующими с роликами-захватами, при этом грузоподъемная площадка снабжена направляющими для катков поддона.
2. Склад по п. I, о т л и ч а to щ и йс я тем, что, привод выдвижения грузоподъемной Площадки содержит винтовую пару.
3. Склад по п. 1, отличающийся тем, что расстояние между роликами-захватами равно расстоянию между парами упоров, расположенных по -длине поддона.
Источники информации,
принятые во внимание при экспертизе1.Авторское свидет.ельство СССР N 4.86982, кл. В 65 G 60/00, 1973.
2.Авторское свидетельство СССР N 348459, кл. В 65 G 59/00, 1970 (прототип).
x
2ff
ЖШ
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузоподъемная платформа крана- шТАбЕлЕРА | 1979 |
|
SU793906A1 |
| Грузоподъемная площадка крана-штабелера | 1982 |
|
SU1119946A1 |
| Грузоподъемная площадка крана-штабе-лЕРА | 1979 |
|
SU844519A1 |
| Кран-штабелер | 1980 |
|
SU893846A1 |
| Грузоподъемная площадка крана-штабелера | 1986 |
|
SU1384503A2 |
| СКЛАД ШТУЧНЫХ ГРУЗОВ | 1973 |
|
SU371151A1 |
| Грузоподъемная площадка крана-штабелера | 1985 |
|
SU1283199A1 |
| Грузоподъемная платформа крана-штабелера | 1978 |
|
SU765158A1 |
| Грузоподъемная площадка крана-штабелера | 1981 |
|
SU1014788A1 |
| Склад для хранения затаренных грузов (его варианты) | 1984 |
|
SU1217729A1 |
ч
К
fPus.l
Ш2.3
««-а
