1
Изобретение относится к оборудо-, ванию складов, а именно к грузоподъeMHiJM платформам кранов-штабелеров.
Известна грузоподъемная платформа крана-штабелера, содержащая грузо- 5 захватные органы, закрепленные на горизонтально расположенных замкнутых приводных тяговых органах, огибающих приводные и натяжные звездочки 1 .
Однако известная платформа неудоб-Ю на в эксплуатации, поскольку требует очень точной установки относительно
груза.
Цель изобретения - повышение удобства эксплуатации. 15
Это достигается тем, что привод тяговых органов снабжен кривошипнокулисным механизмом, электромагнитной муфтой, соединяющей упомянутый механизм с одной из приводных звездочек, 20 и механизмом фиксации кривошипов. Кроме того, механизм фиксации кривошипов может содержать скобу и электромагнит, взаимодействукиций со скобой посредством подпружиненного ры- 25 чага.
На фиг.1 схематически изображен
кран-штабелер с грузоподъемной плат- формой; на фиг.2 - разрез А-А на .gg
2
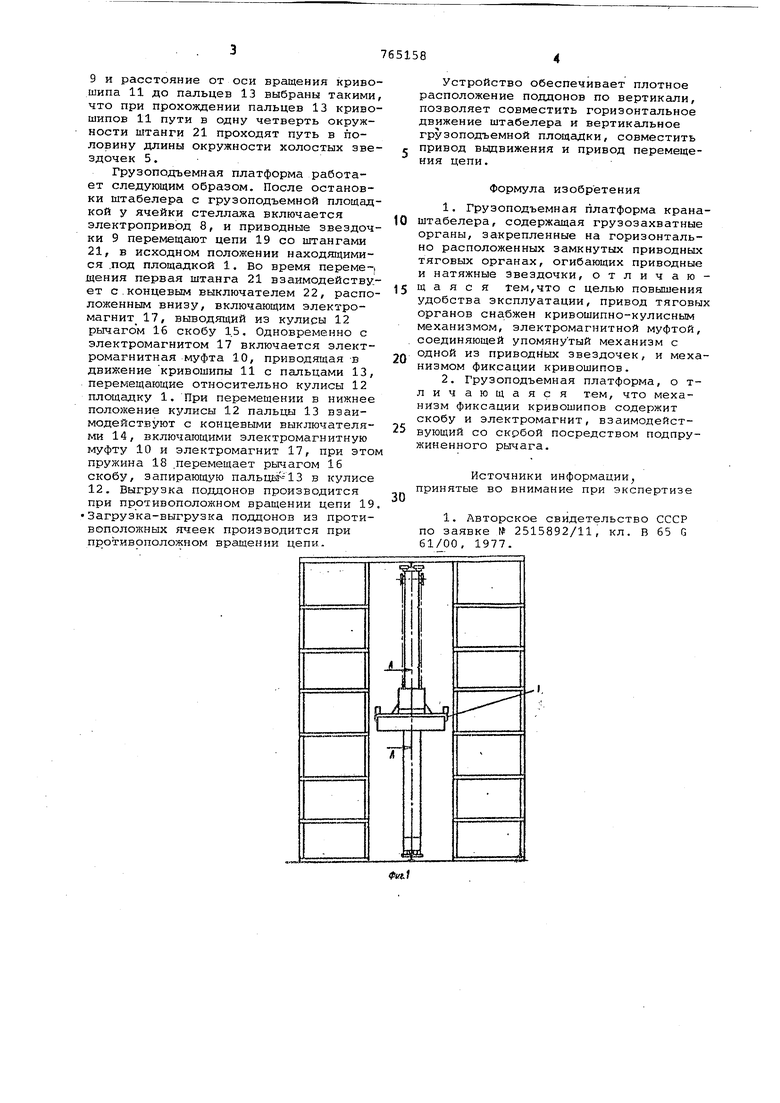
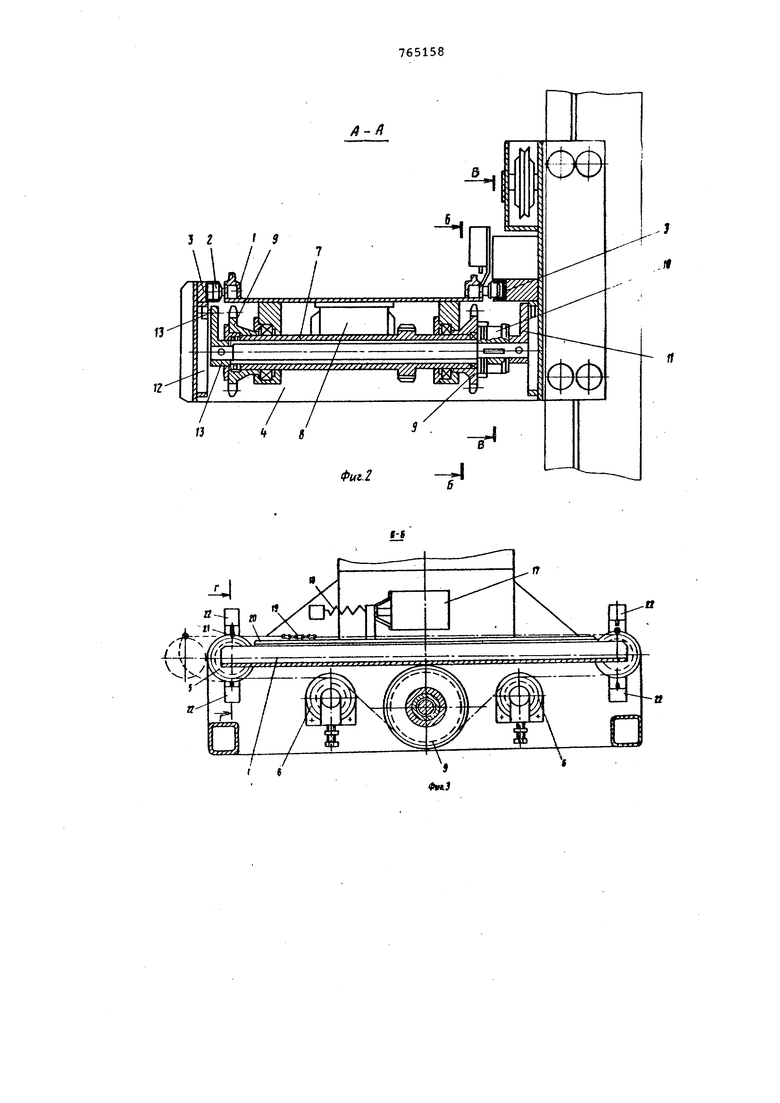
фиг.1; на фиг.З -разрез Б-Б на фиг.2; на фиг.4 - разрез В-В на фиг.2; на фиг.5 - разрез Г-Г на фиг.З
грузоподъемная платформа состоит из ,площадки 1, перемещающейся на катках 2 по направляющим 3 рамы 4, с установленными на краях холостыми звездочками 5, натяжными звездочками 6 с установленными на общем приводном валу 7,.приводящимся в движение элек-. троприводом 8, приводными звездочками 9, соединенными электромагнитной муфтой 10 с кривошипами 11, входящими в зацепление с кулисами 12, вертикально расположенными на раме 4, посредством пальцев 13, взаимодействующих с концевьми выключателями 14, периодически запирающимися скобой 15 в кулисе 12 с помощью рычага 16, соединенного с электромагнитом 17 и пружиной 18. Звездочки 5,6 и 9 запасованы тяговыми органами, например цепями 19, расположенными горизонтально и перемещающимися по направляющим 20 площадки 1. Цепи соединены между собой захватными органами, например штангами 21, взаимодействующими с концевыми выключателями 22, Размеры делительных окружностей звездочек 5,
9 и расстояние от оси вращения кривошипа 11 до пальцев 13 выбраны такими, что при прохождении пальцев 13 кривошипов 11 пути в одну четверть окружности штанги 21 проходят путь в половину длины окружности холостых звездочек 5.
Грузоподъемная платформа работает следующим образом. После остановки штабелера с грузоподъемной площадкой у ячейки стеллажа включается электропривод 8, и приводные звездочки 9 перемещают цепи 19 со штангами 21, в исходном положении находягдимися .под площадкой 1. Во время переме-} 1Яения первая штанга 21 взаимодействует с.концевым выключателем 22, расположенным внизу, включающим электромагнит 17, выводящий из кулисы 12 рычагом 16 скобу 1.5. Одновременно с электромагнитом 17 включается электромагнитная муфта 10, приводящая -в движение кривошипы 11 с пальцами 13, перемещающие относительно кулисы 12 площсщку 1. При перемещении в нижнее положение кулисы 12 пальцы 13 взаимодействуют с концевыми выключателя и 14, включающими электромагнитную муфту 10 и электромагнит 17, при этом пружина 18 .перемещает рычагом 16 скобу, запирающую пальцы 13 в кулисе 12. Выгрузка поддонов производится при противоположном вращении цепи 19, Загрузка-выгрузка поддонов из противоположных ячеек производится при противоположном вра.щении цепи.
Устройство обеспечивает плотное расположение поддонов по вертикали, позволяет совместить горизонтальное движение штабелера и вертикальное грузоподъемной площадки, совместить привод вьщвижения и привод перемещения цепи.
Формула изобретения
1.Грузоподъемная платформа кранаштабелера, содержащая грузозахватные органы, закрепленные на горизонтально расположенных замкнутых приводных тяговых органах, огибающих приводные и натяжные Звездочки, отличающаяся тем,что с целью повышения удобства эксплуатации, привод тяговых органов снабжен кривошипно-кулисным механизмом, электромагнитной муфтой, соединяющей упомянутый механизм с одной из приводных звездочек, и меха0низмом фиксации кривошипов.
2.Грузоподъемная платформа, о тличающаяся тем, что механизм фиксации кривошипов содержит скобу и электромагнит, взаимодейст5вующий со скрбой посредством подпружиненного рычага.
Источники информации принятые во внимание при экспертизе
D
1. Авторское свидетельство СССР по заявке № 2515892/11, кл. В 65 G 61/00, 1977.
П A}
./f fl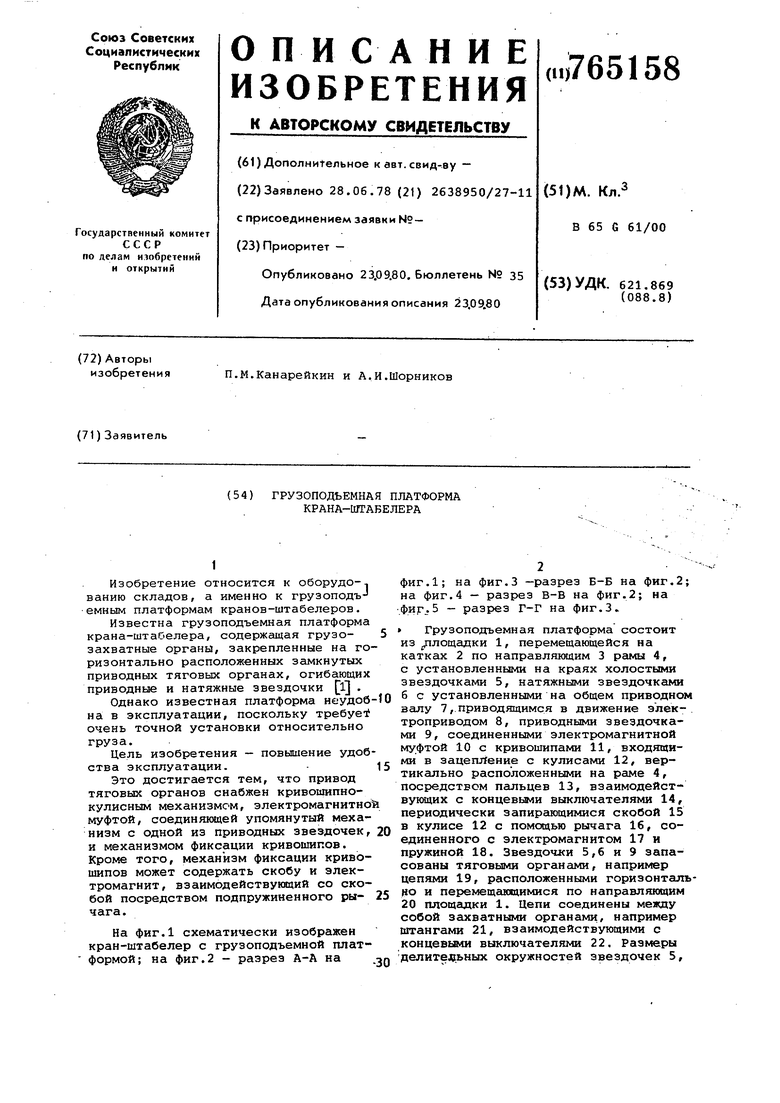
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузоподъемная платформа крана-штабелера | 1987 |
|
SU1416386A1 |
| Грузоподъемная площадка крана-штабелера | 1990 |
|
SU1773814A1 |
| Грузоподъемная площадка крана-штабелера для поддонов с пазами под грузозахватные элементы | 1982 |
|
SU1058835A1 |
| Грузоподъемная площадка крана-штабелера | 1978 |
|
SU887389A1 |
| Перегрузочное устройство для стеллажных складов | 1983 |
|
SU1146240A1 |
| Устройство для подачи материала в рабочую зону пресса и удаления отштампованных изделий | 1985 |
|
SU1321504A1 |
| Грузоподъемная площадка крана-штабелера | 1987 |
|
SU1557020A1 |
| Склад для хранения крупногабаритных грузов | 1981 |
|
SU1018884A1 |
| УСТРОЙСТВО ДЛЯ ГОРИЗОНТАЛЬНОГО СМЕЩЕНИЯ ПОДДОНА | 1991 |
|
RU2028442C1 |
| Грузоподъемная площадка крана-штабелера | 1981 |
|
SU981129A1 |

rH tt
s
Г- Г
/
Л
л
/
