(54) ВЕРТИКАЛЬНЫЙ ЦЕПНОЙ КОНВЕЙЕР ДЛЯ ШТУЧНЫХ ГРУЗОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Вертикальный цепной конвейер для транспортирования штучных грузов | 1972 |
|
SU466157A1 |
| Автоматизированный склад | 1972 |
|
SU595219A1 |
| Вертикальный цепной конвейер для транспортирования штучных грузов | 1982 |
|
SU1071537A1 |
| КОНВЕЙЕР ДЛЯ ТРАНСПОРТИРОВАНИЯ ШТУЧНЫХ ГРУЗОВ | 1967 |
|
SU198225A1 |
| Подъемное устройство | 1990 |
|
SU1722981A1 |
| Вертикальный цепной конвейер | 1990 |
|
SU1776247A3 |
| ВЕРТИКАЛЬНАЯ КОНВЕЙЕРНАЯ СИСТЕМА | 1994 |
|
RU2068381C1 |
| Устройство для подъема штучных грузов | 1989 |
|
SU1632880A1 |
| ВЕРТИКАЛЬНАЯ КОНВЕЙЕРНАЯ СИСТЕМА | 1995 |
|
RU2083454C1 |
| Вертикально замкнутый тележечный конвейер-накопитель | 1988 |
|
SU1609728A1 |
1
Изобретение относится к промышленному транспорту, в частности к вертикальным конвейерам для штучных грузов.
Известен вертикальный цепной конвейер, содержащий раму с установленными на ней приводными, натяжными и отклоняющими звездочками, и огибающие их две пары параллельно расположенных замкнутых тяговых цепей с прикрепленными к ним грузонесущими площадками 11. Однако этот конвейер не отвечает требованиям безопасного транспортирования грузов. Например, при обрыве цепи, поломке в узле крепленная к цепи платформы или разрушении самой платформы груз падает, причиняя существенные убытки, вследствие чего значительно снижается )фективность применения данного конвейера. В некоторых отраслях промыш)1енности применение его невозможно.
Известен также вертикальный цепной конвейер для штучных 1ру.юп, содержащий раму со смонтированными на ней приводной и натяжной скппшями, а тпкжё отклоняющими звездочками, огибаемыми двумя парами параллельно расположенных замкнутых тяговых цепей, на которых закреплены грузонесущие Пла1формы 2. Этот конвейер обладает теми же недостатками.
Цель изобретения - обеспечение безопасности в случае обрыва тяговой цепи или разрушения платформы.
Это достигается тем, что рама снабжена
15 фиксирования заданной величины перемещения шправл5потих. Платформы снабжены закрепленными на них ползунами , охватывающими упомянутые направляющие. Кроме того, для ограничения перемещения направляющих под
20 кронштейнами смонтированы упорные винты.
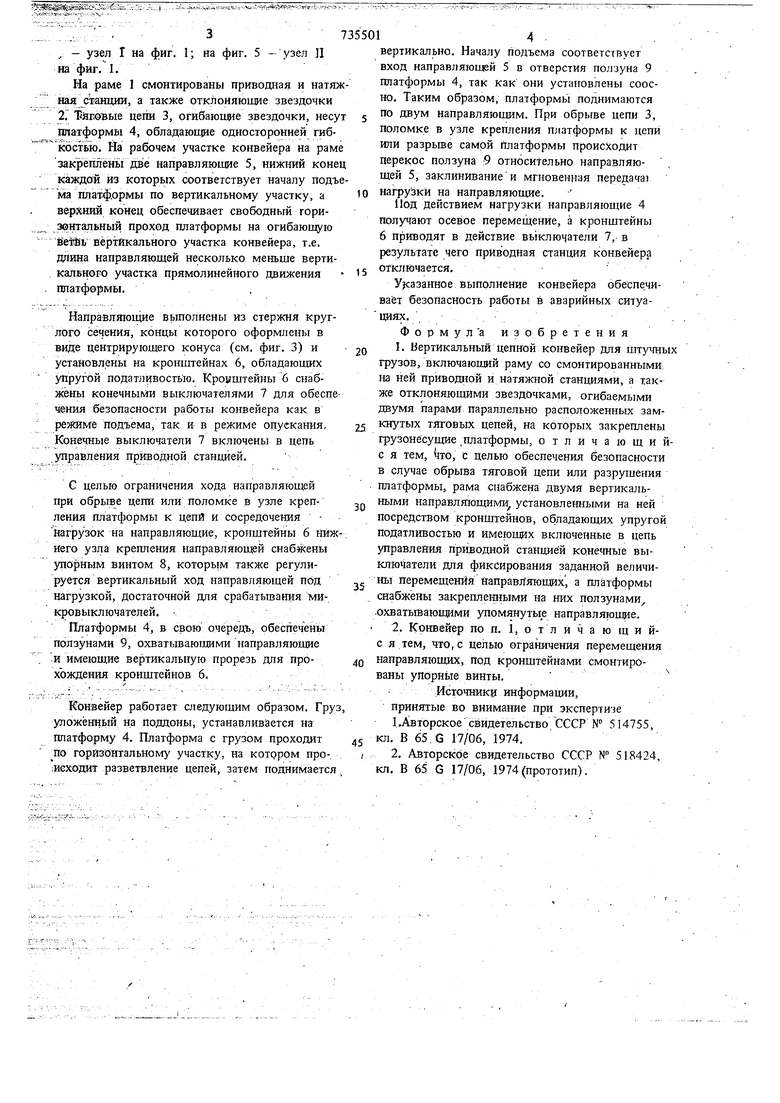
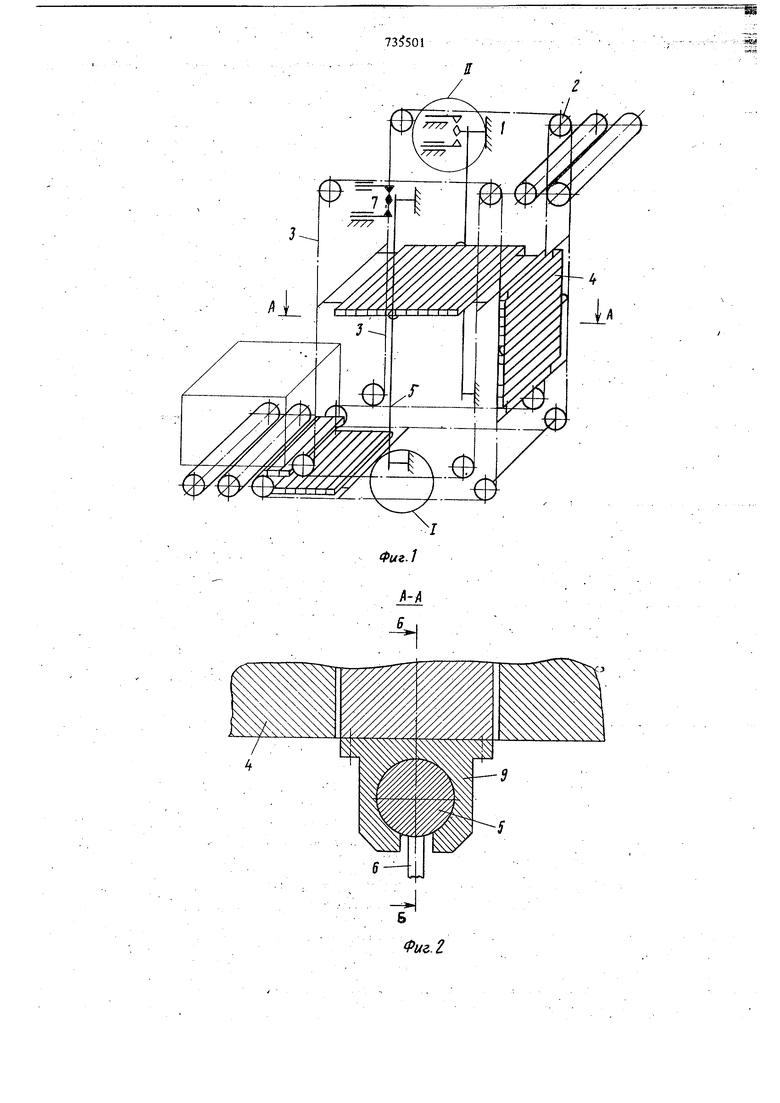
На фиг. 1 схематически изображен конвейер, общий вид; на фиг. 2 - разрез А-А на фиг.1; на фиг. 3 - сечение на фиг. 2; на фиг.4/ - узел Г на фиг. 1; на фиг. 5 - узел П на фиг, 1, На раме 1 смонтированы привощ1ая и натя ная Утанции, а также отклоняющие звездочки 2. Рйговые цепи 3, огибаюиие звездочки, нес платформы 4, обладающие односторонней гиб костью. На рабочем участке конвейера на рам закреплены две направляющие 5, нижний кон каждой из которых соответствует началу под ма платформы по вертикальному участку, а верхний конец обеспечивает свободный гориэонталБНый проход платформы на огибающую ветШь вертикального участка конвейера, т.е. длина направляющей несколько меньще верти калвноро участка прямолинейного движения платформы. Направяяющие выполнены из стержня круг лого сечения, концы которого оформлены в виде центрирующего конуса (см. фиг. 3) и установлены на кронштейнах 6, обладающих упругой податливостью. Кронщтейны 6 снабжены конечными выключателями 7 для обесп чения безопасности работы конвейера как в режиме подъема, так и в режиме опускания, Конечные выключатели 7 включены в цепь управления приводной станцией. С целью ограничения хода направляющей при обрыве цепи или поломке в узле крепления платформы к цепи и сосредочения Нагрузок на направляющие, кронщтейны 6 ш Него узла крепления направляющей снабжены упорным винтом 8, которцм также регулируется вертикальный ход направляющей под нагрузкой, достаточной для срабатывания микровыключатепей. Платформы 4, в свою очередь, обеспечены ползунами 9, охватываюишми направляющие и имеющие вертикальную прорезь для прохождения кронщтейнов 6. . - / . , - ..--Конвейер работает следующим образом. Гр уложенный на поддоны, устанавливается на платформу 4. Платформа с грузом проходит по горизонтальному участку, на KOTQPOM про:исходит разветвление цепей, затем поднимаетс вертикально. Началу подъема соответствует вход направляющей 5 в отверстия ползуна 9 платформы 4, так как они установлены соосно. Таким образом, платформы поднимаются по двум направляющим. При обрыве цепи 3, поломке в узле крепления платформы к цепи или разрыве самой Платформы происходит перекос ползуна 9 относительно направляющей 5, заклинивание и мгновенная передача нагрузки на направляющие. Под действием нагрузки направляющие 4 получают осевое перемещение, а кронштейны 6 приводят в действие вь1ключатели 7, в результате чего приводная станция конвейера отклйчается. Указаьшое выполнение конвейера обеспечиBaiST безопасность работы в аварийных ситуациях. Формула изобретения 1.Вертикальный цепной конвейер для штучных грузов, включающий раму со смонтированными на ней приводной и натяжной станциями, а также отклоняющими звездочками, огибаемыми двумя парами параллельно расположенных замкнутых тяговых цепей, на которых закреплены грузонёсущие платформы, отличающийс я тем, km, с целью обеспечения безопасности в случае обрыва тяговой цепи или разруще шя платформы, рама снабжена двумя вертикальными направляющими, установленными на ней посредством кронЩтейнов, обладающих упругой податливостью и имеющих включенные в цепь управления приводной станцией конечные выключатели для фиксирования заданной величины перемещения Направляющих , а платформы снабжены закреплен ыми на них ползунами, .охватывающими упомянутые направляющие. 2.Конвейер по п. 1, о т л и ч а ю щ и йс я тем, что, с целью ограничения перемещения юправляющих, под кронщтейнами смонтированы ynopHbie винты. Источники информации, принятые во внимание при экспертизе 1,Авторское свидетельство СССР N 514755, кл. В 65. G 17/06, 1974, 2, Авторское свидетельство СССР N 518424, кл, В 65 G 17/06, 1974(прототип).
Фиг.4
Фиг.. 5
