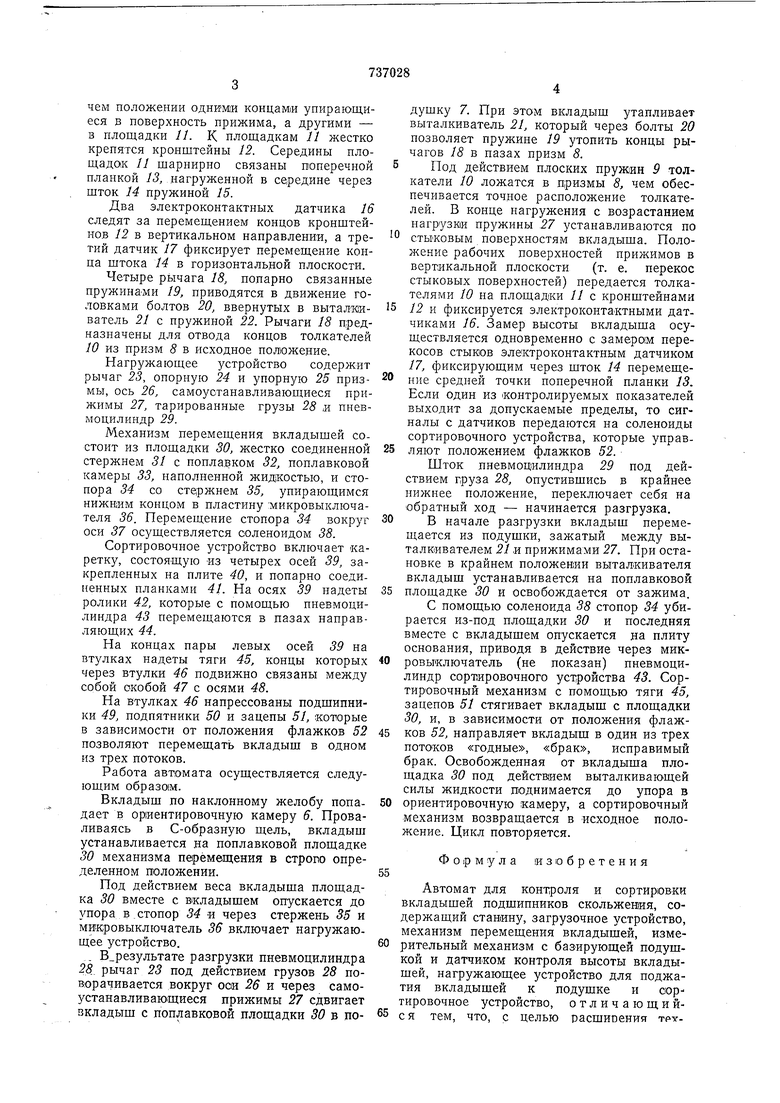
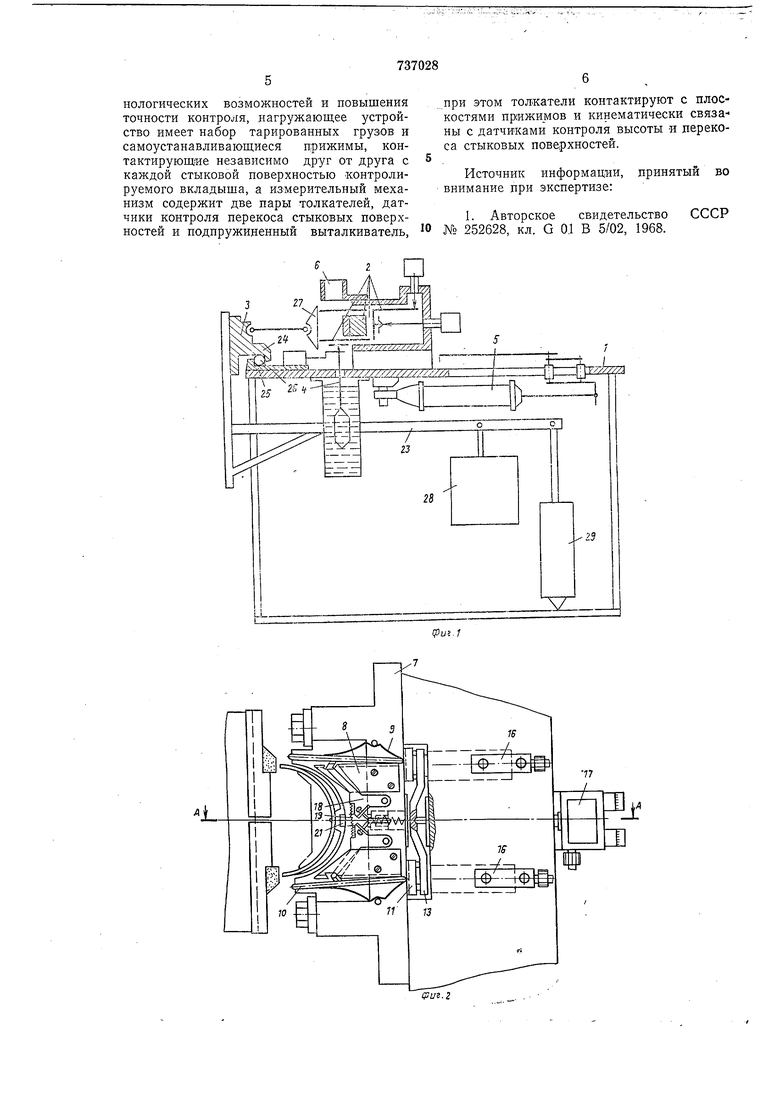
чем положении одними концами упирающиеся в поверхность прижима, а другими - в площадки п. К площадкам 11 жестко крепятся кронштейны 12. Середины площадок 11 щарнирпо связаны поперечной планкой /5, нагруженной в середине через щток 14 пружиной 15.
Два электроконтактных датчика 16 следят за перемещением концов кронштейнов 12 в вертикальном направлении, а третий датчик 17 фиксирует перемещение конца штока 14 в горизонтальной плоскости.
Четыре рычага 18, попарно связанные пружинами 19, приводятся в движение головками болтов 20, ввернутых в выталкиватель 21 с пружиной 22. Рычаги 18 предназначены для отвода концов толкателей 10 из призм 8 в исходное полюжение.
Нагружающее устройство содержит рычаг 23, опорную 24 и упорную 25 призмы, ось 26, самоуотанавливающиеся прижимы 27, тарированные грузы 28 ,и пневмоцилиндр 29.
Механизм перемещения вкладышей состоит из площадки 30, жестко соединенной стержнем 31 с поплавком 32, поплавковой камеры 33, наполненной жидкостью, и стопора 34 со cтqpжнeм 35, упирающимся НИЖН1ИМ кондом в пластину микровыключателя 36. Перемещение стопора 34 вокруг оси 37 осуществляется соленоидом 38.
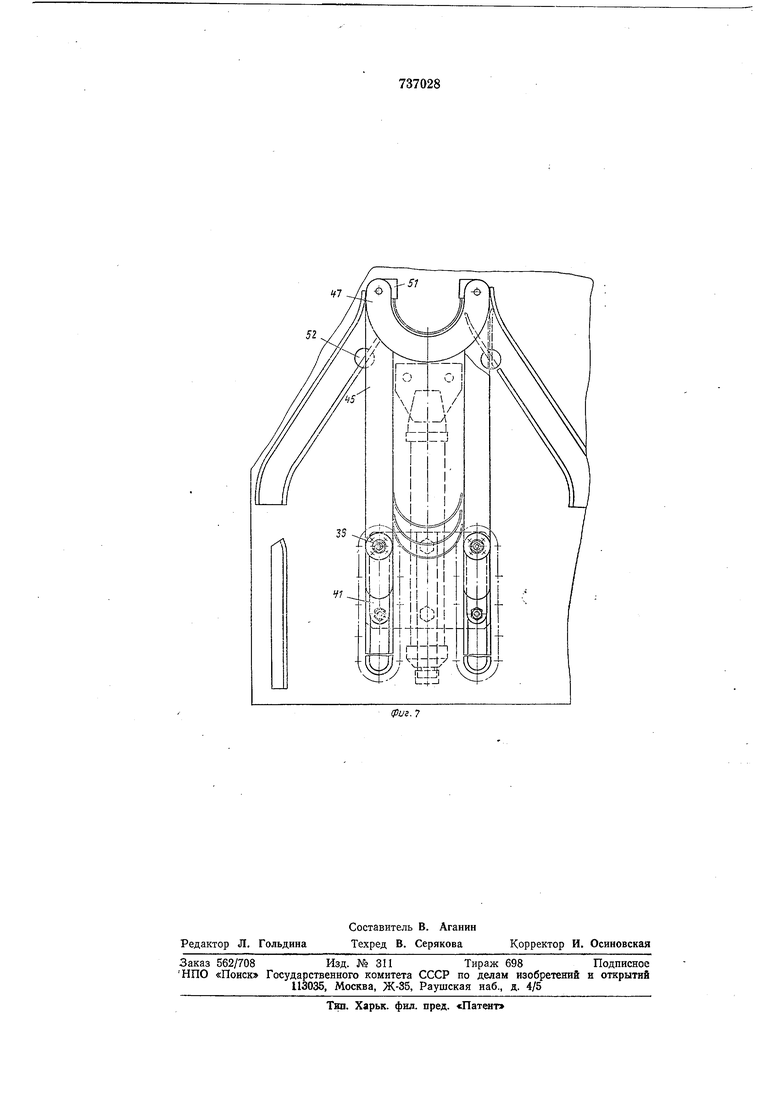
Сортировочное устройство включает каретку, состоящую из четырех осей 39, закрепленных на плите 40, и попарно соединенных планками 41. На осях 39 надеты ролики 42, которые с помощью пневмоцилиндра 43 перемещаются в пазах направляющих 44.
На концах пары левых осей 39 на втулках надеты тяги 45, концы которых через втулки 46 подвижно связаны между собой окобой 47 с осями 48.
На втулках 46 напрессованы подшипники 49, подпятники 50 и зацепы 51, которые в зависимости от положения флажков 52 позволяют перемещать вкладыщ в одном из трех потоков.
Работа автомата осуществляется следующим образом.
Вкладыщ по наклонному желобу попадает в ориентировочную камеру 6. Проваливаясь в С-образную щель, вкладыш устанавливается на поплавковой площадке 30 механизма перемещения в строло определенном положении.
Под действием веса вкладыша площадка 30 вместе с вкладышем опускается до Зпора в стопор 34 и через стержень 35 и мвкровыключатель 36 включает нагружаю, щее устройство.
В результате разгрузки пневмоцилиндра 28 рычаг 23 под действием грузов 28 поворачивается вокруг сои 26 и через самоустанавливающиеся прижимы 27 сдвигает вкладыш с поплавковой площадки 30 в подушку 7. При этом вкладыщ утапливает выталкиватель 21, который через болты 20 позволяет пружине 19 утопить концы рычагов 18 в пазах призм 8. Под действием плоских пружин 9 толкатели 10 ложатся в призмы 8, чем обеспечивается точное расположение толкателей. В конце нагружения с возрастанием нагрузк1И пружины 27 устанавливаются по стыковым поверхностям вкладыша. Положение рабочих поверхностей прижимов в вертикальной плоскости (т. е. перекос стыковых поверхностей) передается толкателями 10 на площадки // с кронштейнами
12 и фиксируется электроконта«тными датчиками 16. Замер высоты вкладыша осуществляется одновременно с замерам перекосов стыкюв электроконтактным датчиком 17, фиксирующим через щток 14 перемещение средней точки поперечной планки 13. Если один из контролируемых показателей выходит за допускаемые пределы, то сигналы с датчиков передаются на соленоиды сортировочного устройства, которые управляют положением флажков 52.
Шток пневмоцилиндра 29 под действием груза 28, опустивщись в крайнее нижнее положение, переключает себя на обратный ход - начинается разгрузка.
В начале разгрузки вкладыш перемещается из подущки, зажатый между выталкивателем 21 и прижимами 27. При остановке в крайнем положении выталкивателя вкладыщ устанавливается на поплавковой
площадке 30 и освобождается от зажима. С помощью соленоида 38 стопор 34 убирается из-под площадки 30 и последняя вместе с вкладышем опускается на плиту основания, приводя в действие через микровыключатель (не показан) пневмоцилиндр сортировочного устройства 43. Сортировочный механизм с помощью тяги 45, зацепов 51 стягивает вкладыш с площадки 30, и, в зависимости от положения флажков 52, направляет вкладыш в один из трех потоков «годные, «брак, исправимый брак. Освобожденная от вкладыща площадка 30 под действ ием выталкивающей силы жидкости поднимается до упора в
ориентировочную камеру, а сортировочный механизм возвращается в исходное положение. Цикл повторяется.
Формула изобретения
Автомат для контроля и сортировки вкладышей подшипников скольжения, содержащий станину, загрузочное устройство, механизм перемещения вкладышей, измерительный механизм с базирующей подушкой и датчиком контроля высоты вкладышей, нагружающее устройство для поджатия вкладыщей к подущке и сортировочное устройство, отличающийс я тем, что, с целью расширения TPVнологических возможностей и повышения точности контроля, нагружающее устройство имеет набор тарированных грузов и самоустанавливающиеся прижимы, контактирующие независимо друг от друга с каждой стыковой поверхностью контролируемого вкладыша, а измерительный механизм содержит две пары толкателей, датчики контроля перекоса стыковых поверхностей и подпружиненный выталкиватель,
при этом толКателн контактируют с плоскостями пр:ижи мов и кинематически связаны с датчиками контроля высоты и перекоса стыковых пове;рхностей.
Источник информации, принятый во внимание при экспертизе:
СССР
1. Авторское свидетельство № 252628, кл. G 0.1 В 5/02, 1968.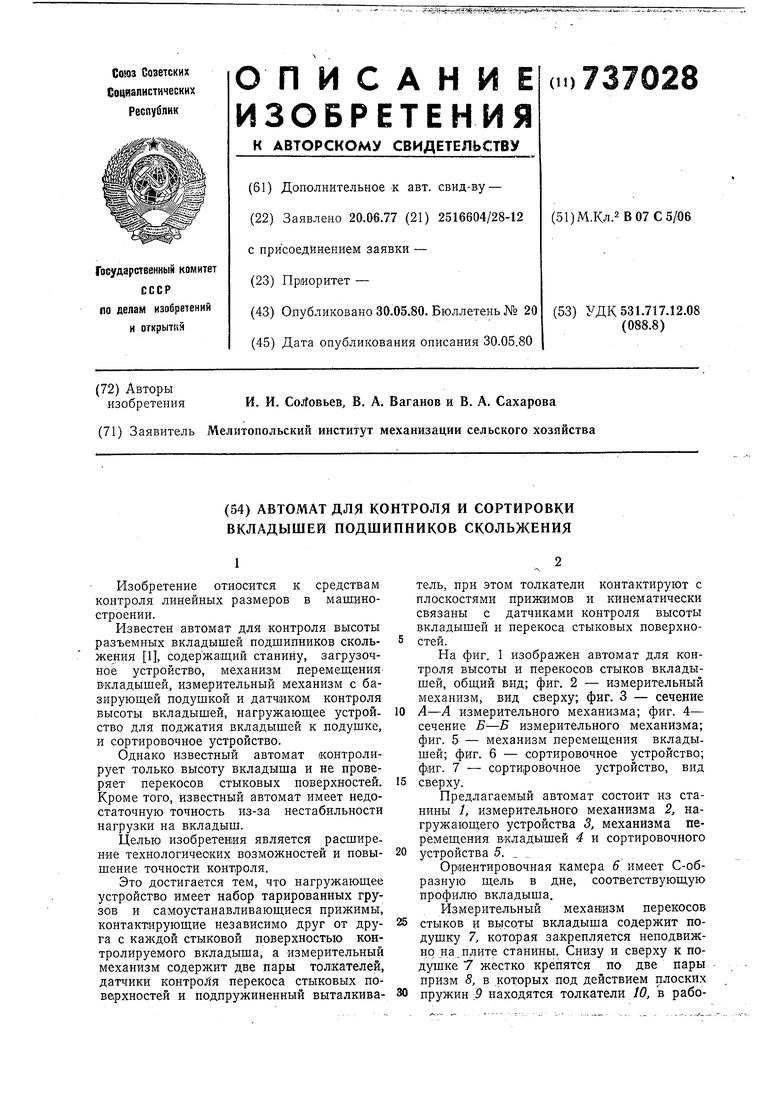
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для контроля и сортировки вкладышей подшипников скольжения | 1980 |
|
SU917870A1 |
| Автомат для контроля и сортировки вкладышей подшипников скольжения | 1988 |
|
SU1664416A1 |
| Станок для сборки гусеничной цепи | 1973 |
|
SU477813A1 |
| Устройство для сортировки деталей | 1985 |
|
SU1388109A1 |
| Переносной манипулятор доения коров | 2023 |
|
RU2812332C1 |
| АВТОМАТ ДЛЯ КОНТРОЛЯ И СОРТИРОВКИ ЦИЛИНДРИЧЕСКИХ ДЕТАЛЕЙ | 2002 |
|
RU2218260C2 |
| Автомат для сборки | 1987 |
|
SU1428561A2 |
| Автомат для сортировки электродов по толщине | 1976 |
|
SU603438A1 |
| Устройство для горячего прессования | 1974 |
|
SU517948A1 |
| Шаговый конвейер-накопитель | 1979 |
|
SU859259A1 |
It
51
Ш I®.
Ф
