(54) ЗАХВАТ
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват | 1981 |
|
SU954038A1 |
| Пневматический захват | 1977 |
|
SU632634A1 |
| Захватное устройство | 1984 |
|
SU1237418A1 |
| Схват манипулятора | 1985 |
|
SU1585149A1 |
| Вакуумный захватный орган | 1985 |
|
SU1294434A1 |
| Захват | 1981 |
|
SU975392A1 |
| Устройство для сбора плодов | 1980 |
|
SU882471A1 |
| Схват промышленного робота | 1977 |
|
SU662344A1 |
| Захват промышленного робота | 1987 |
|
SU1465308A1 |
| Захват манипулятора | 1978 |
|
SU766857A1 |
Изобретение .относиися к област1И маши.ностроания, а именно, к заяватам ма.нипулят ров, предназначенных для а втоматизация сборочных работ.
Известен захват (манипулятора, предна- 5 значевного для автоматизация различных технолотическйх операщий, в котором обеспечена возможность надежного крепления детали упругими губками i.
Недостатком захвата Я вляет ся слож- Ю «ость конструкции и незначительный перечень видов деталей, которые может брать данный захват.
Наиболее близким решением (К изобретению является зах1в.ат, в котором -содер- 15 жашся установленные на корпусе эластичные пустотелые пальцы, снабженные гибкой нерастягивающейся лластйной, и систему подачи IB них сжатого вюздуха 2
Недостаток такого захвата заключает- 20 ся IB том, что он не О1бес:печи1вает возможности захватывать детали как за наружные, так и за внутренние паверхности.
Целью изобретения является расширение технологических возможностей иутем 25 Обеопечения захвата деталей как за наружные, так и за внутренние поверхности.
Цель достигается тем, что каждый палец снабжея жесткими кольцами, закрепленными на его наружной поверхности, а 30
пластина расположена внутри пальца и образует с его внутренней по.ве(рхностью изоли1рова:нные полости, связанные с системой подачи сжатого воздуха, а также тем, что на одном из колец выполнено сквозное отверстие, соединяющее лолость пальца с атмосферой, причем на входе сжатого воздуха в эту полость установлен управляемый дроссель.
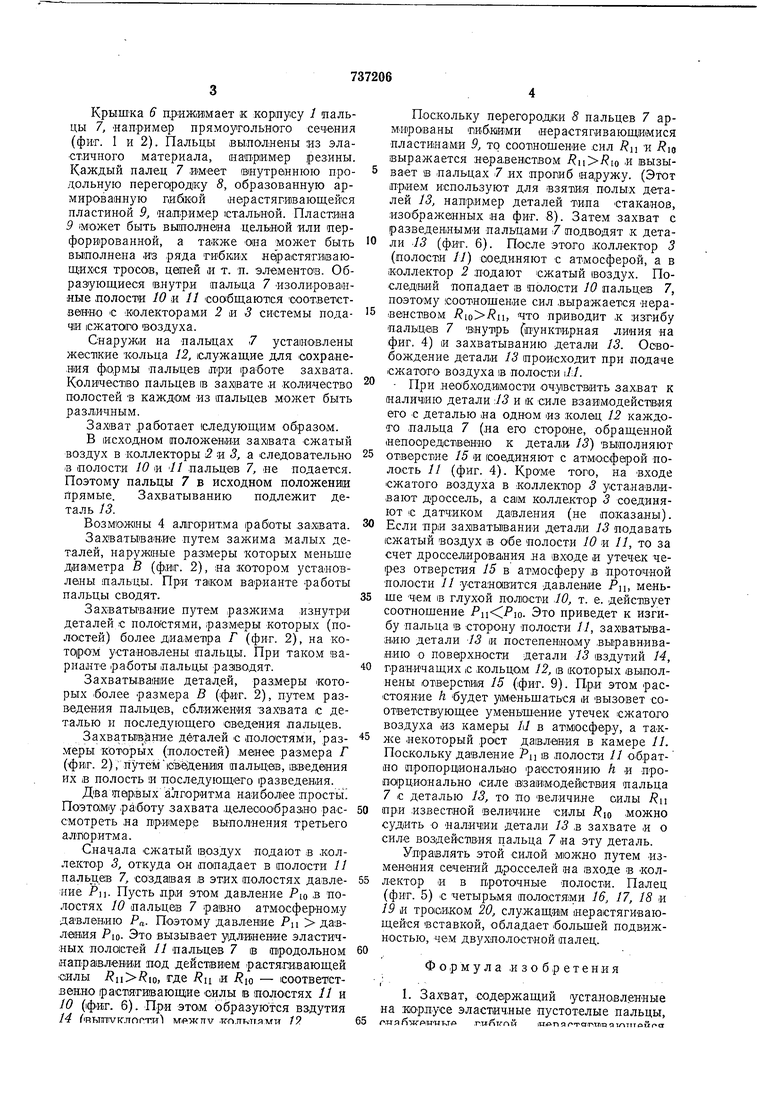
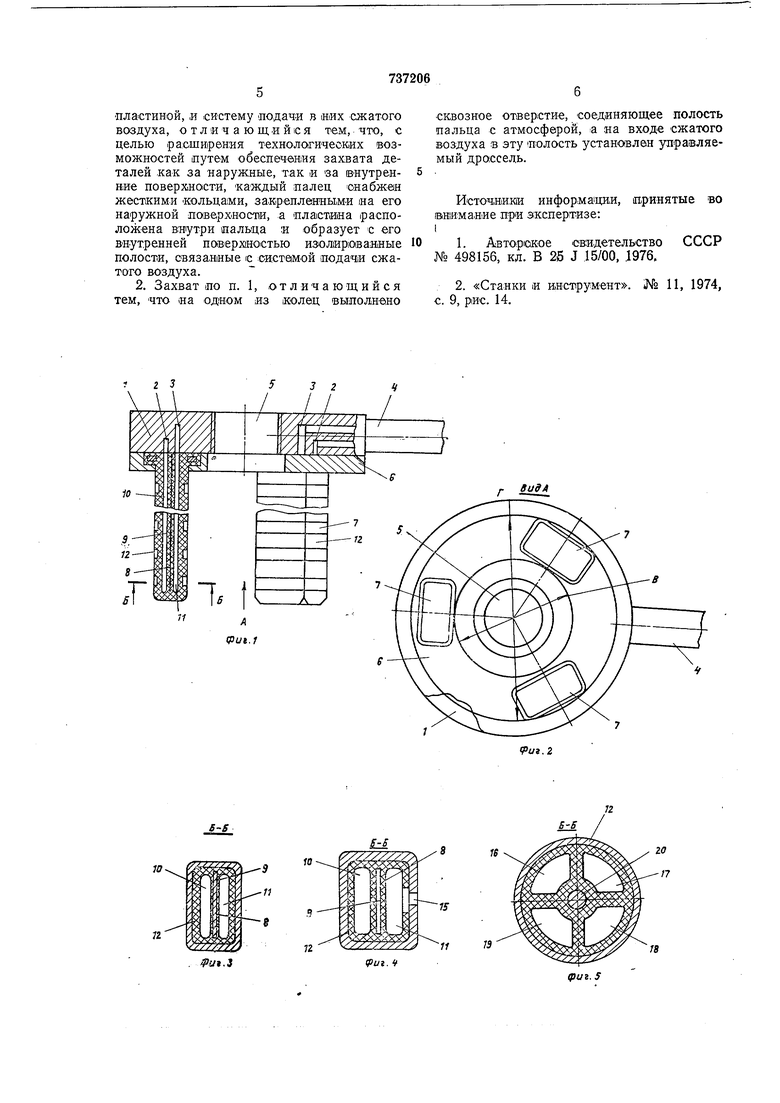
На фиг. 1 изображен захват, разрез; на фиг. 2 - вид по стрелке Л на фиг. 1; на фиг. 3-5 - разрез по Б-lE на фиг. 1 (варианты); на фиг. 6 - работа захвата в фазе сближения с деталью; на фиг. 7 - то же, при уде|рживании детали за наружную поверхность, зажим; на фи1Г. 8 - то же, при удерживании детали за внутреннюю поверхность, разжим; на фиг. 9 - рабрта очувствленного пальца захвата при удерживании детали.
Захват состоит из 1ко.ль1це1вого корпуса J с двумя полостями - коллекторами 2 и 3, сообщающимися через каналы в руке 4 и через .соответствующие распределители (|не показаны) с системой подачи сжатого воздуха.
В корпусе / 1вьшолнен;0 центральное отверстие 5, служащее для помещения там регулируемого упора .или дая прохода толкателя (не показаны).
Крышка 6 црижвмает к корпусу / пальцы 7, «ап.рИмер прямоугольйото сечеиия (фИГ. 1 и 2). Пальцы ;вьтол;Нвны из эластичного материала, например резины. Каждый налец 7 имеет внутреннюю продольную перегрродку 8, образованную армнроваиную гибкой 1нерастягн1вающейся пластиной 9, «апример ютальной. Пластина
91может быть выполнена цельной или перфорированной, а также она может быть выполнена из ряда гибких нфаютят-ввающихся тросов, цепей .и т. п. элементов. Образующиеся 1В.нутр.и пальца 7 Изолироваиные полости 10 и // сообщаются соответстeeiHHo с ;колекторам.и 2 и системы нодаtjH сжатопо воздуха.
Снаружи на палнцах 7 устаиоелены жест1кие кольца 12, служащие для оохранения формы палыцев три работе захвата. Количест)во нальцев IB захвате .и количество полостей В каждам из пальцев может быть различным.
Захват работает следующим образом.
В исходном положении зах1вата сжатый воздух в коллекторы 2 и 3, а следовательно в полости 10 и // пальцев 7, «е подается. Поэтому пальцы 7 в исходном положении прямые. Захватыванию подлежит деталь 13.
Возможны 4 алгоритма работы .
Захватывание путем зажима малых деталей, наружные размеры которых меиьще диа/метра В (фиг. 2), яа котором уста«овлены пальцы. При таком варианте работы пальцы сводят.
Захватываиие путем разжима изнутри деталей с полостями, размеры которых (полостей) более диаметра Г (фиг. 2), на котором устаио/влены пальцы. При таком варианте работы пальцы раз1водят.
Захватывание детал.ей, размеры которых .более размера В (фиг. 2), путем разведения пальцев, сближения зах-вата с деталью и последующего аведения пальцев.
Захваты1в.ание деталей с полостями, размеры которых (полостей) .менее размера Г (фиг. 2),11утем|СВёДен1Ия пальцев, (введения их iB полость и последующего разведения.
Два первых алгоритма наиболее просты . Поэтому захвата делеоообразно рассмотреть на примере выполнения третьего алгоритма.
Сначала сжатый воздух подают в коллектор 3, откуда он попадает в полости // паль,цев 7, создавая в этих полостях давление РП. Пусть при этом давление РЮ ,в полостях 10 пальцев 7 равно атмосферному давлению Ра. Поэтому давление Рц давления РЮ. Это вызывает удлинение эластичных полостей 11 пальцев 7 IB продольном направлении под действием растягивающей силы , где 11 и Кю - соответственно растягивающие силы в полостях // и
10(фиг. 6). При STOiM образуются вз.дутия
14 СНЫГПУКЛППТИ M.PЖПV ,К .ПЛКТТ,Я:МИ
Поскольку перегородки 5 пальцев 7 армированы либйими нерастягйвающимися пластинами 9, то соотнощение сил Рц и ig :выражается неравенством и вызывает в пальцах 7 их прогиб наружу. (Этот прием нсПОльзуют для взятия полых деталей 13, например деталей типа стаканов, изображенных на фиг. 8). Затем захват с разведенными пальщами 7 подводят к детали 13 (фиг. 6). После этого коллектор 3
(полости 11) соединяют с атмосферой, а в коллектор 2 подают сжатый воздух. Последний попадает IB полости 10 пальцев 7, поэтому соотнощение сил выражается неравенством , ЧТО приводит к изгибу пальцев 7 внутрь (срунктирная лииия на фиг. 4) и захватыванию детали 13. Освобождение детали 13 происходит при подаче сжатого воздуха IB полости 1.}.
При необходи1мости очувств1ить захват к наличию детали 13 и к силе взаимодействия его с деталью на одном из колец 12 каждого пальца 7 (на его стороне, обращенной непооредственно к детали 13} выполняют отверстие 15 и (соединяют с атмосферой полость // (фиг. 4). Кроме того, на входе сжатого воздуха в коллектор 3 уста,навливают дроссель, а сам коллектор 3 соединяют с датчиком давления (не показаны). Если при зах1ваты1вании детали 13 подавать сжатый воздух в обе полости 10 и 11, то за счет дроосеЛ|Ирования на входе и утечек через отверстия 15 в атмосферу в проточной полости // установится давление Рц, меньще 4ieM IB глухой полости .10, т. е. действует соотнощение . Это приведет к изгибу пальца в сторону полости //, захватыванию детали 13 и постепенному выравниванию о поверхности детали 13 вздутий 14, граничащих с кольцом 12, в которых выполнены отверстия 15 (фиг. 9). При этом расстояние h будет уменьщаться и вызовет соответствующее уменьшение утечек 1сжатого воздуха из камеры LI в атмосферу, а также .некоторый рост давления в камере //. Поскольку давление Рц в полости // о братно пропор.ц)иональ.но расстоянию h и прооарционально силе в заимодействия пальца 7 с деталью 13, то по величине силы Rn при известной величине силы RIQ можно судить о наличии детали 13 в захвате и о силе воздействия пальца 7 на эту деталь.
Управлять этой силой мюжно путем .изменения сечений дросселей на входе в коллектор и в п.роточны.е полости. Па.лец (фиг. 5) с четырьмя полостями 16, 17, 18 и 19 и троюиком 20, служащим нерастягивающейся вставкой, обладает .больщей подвижностью, чем двухполостной палец.
Формула изобретения
|ТТЯ/ ЯГА.тт.иктА .r. itTrf n Q пта.г-.тлр а Tv TiTQTjncr
пластиной, ,и систему лодачи в «их сжатого воздуха, отличающийся тем, что, с целью расширения технологических возможностей путем обеспечения захвата деталей .как за наружные, так и ва ввНутренйие поверх,но.сти, каждый палец снабжен жесткими кольцами, закр епленными :на его наружной паверхност1И, а пластина расположена внутри лальца я образует с его воутренней пов1ерх1ностью изол1ИроваН|Ные полости, связанные ic системой лодач|И сжатого воздуха.
сквозное отверстие, соединяющее полость пальца с атмосферой, л на входе сжатого воздуха в эту гоолость устано(влен управляемый дроссель.
Источник1И информа ции, принятые во
внимание при экспертизе:
B-S
.3
