(54) ЗАХВАТ МАНИПУЛЯТОРА
1
Изобретение относится к созданию промышленных роботов-манипуляторов и может быть использовано для надежного захватывания и закрепления деталей различной формы и веса при работе в различных средах
Известен захват манипулятора, каждая губка которого содержит эластичный баллон и источник давления 1.
Недостатком захвата является медленное и ненадежное закрепление детали.
Цель изобретения - повышение надежности закрепления детали и повышение быстродействия.
Поставленная цель достигается тем, что каждая губка захвата снабжена дополнительным баллоном, выполненным также из эластичного материала, причем все баллоны соединены с источником давления.
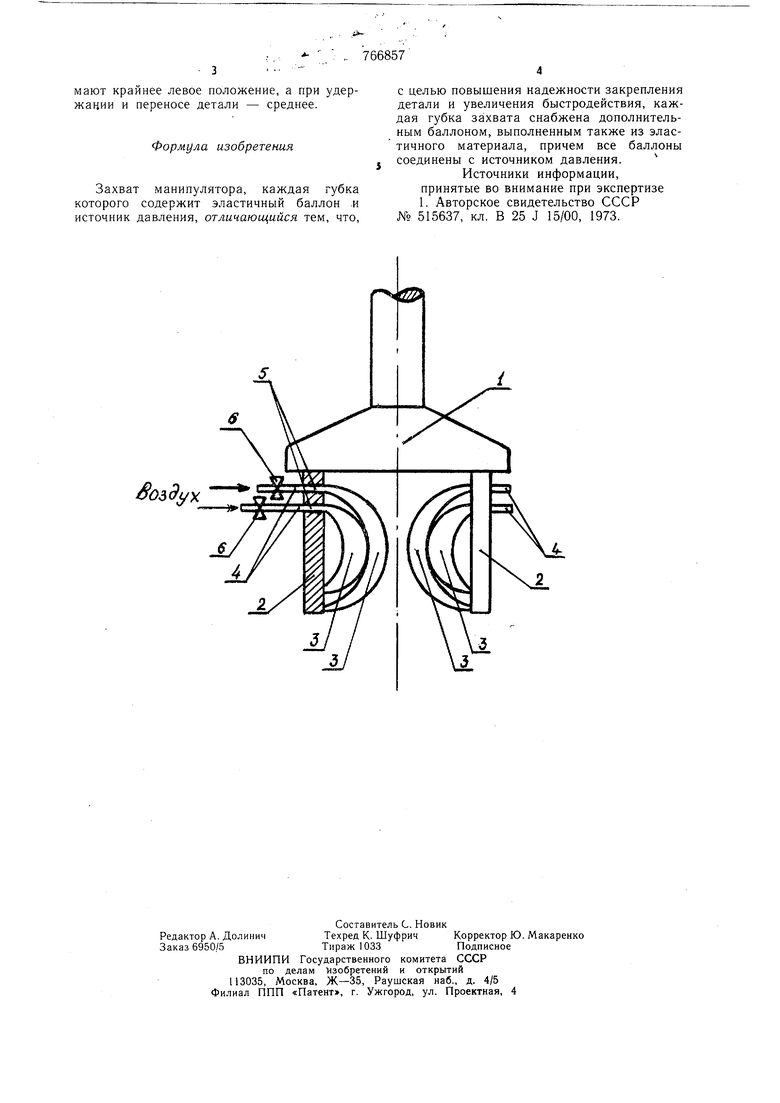
На чертеже изображен захват манипулятора.
Захват содержит опору 1, к которой крепятся пальцы стойки 2 с губками, выполненными из нескольких баллонов 3, размешенных одна над другой, надуваемых сжатым воздухом, поступаемым по шлангам 4 через отверстия 5 в стойках, причем оболочки выполняются из прочн&го материала, допускаюш,его большие упругие деформации. На шлангах 4, по которым сжатый воздух подается в каждую оболочку губок независимо от подачи его в остальные оболочки, установлены трехходовые клапаны 6.
Захват работает следуюш,им образом. При захватывании деталей захватом манипулятора сжатый воздух по шлангам 4 через отверстия 5 подается в каждый баллон 3 одновременно. При этом характер материала, из которого выполнена деталь
10 (магнитный или не магнитный) не влияет на работу захвата. При захватывании очень мелких деталей сжатый воздух подается Одновременно во все баллоны 3. Если же деталь имеет довольно большие размеры, то воздух подается только в верхние баллоны
губок. Изменением давления сжатого воздуха, поступающего в баллоны 3, достигается регулировка удерживаюш,его деталь усилия. Поэтому захват может удерживать детали, имеющие не только различные габариты,
20 но и различный вес. Для того, чтобы захват отпустил деталь, воздух стравливается из баллонов 3. Трехходовые клапаны 6 при этом находятся в крайнем правом положении. При захватывании детали клапаны 6 занимают крайнее левое положение, а при удержании и переносе детали - среднее.
Формула изобретения
Захват манипулятора, каждая губка которого содержит эластичный баллон .и источник давления, отличающийся тем, что.
с целью повышения надежности закрепления детали и увеличения быстродействия, каждая губка захвата снабжена дополнительным баллоном, выполненным также из эластичного материала, причем все баллоны соединены с источником давления.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 515637, кл. В 25 J 15/00, 1973.
Озд(х
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора | 1982 |
|
SU1047680A2 |
| Захват промышленного робота | 1979 |
|
SU831610A1 |
| Исполнительный орган манипулятора | 1979 |
|
SU831611A2 |
| Исполнительный орган манипулятора | 1979 |
|
SU854709A2 |
| Схват робота | 1986 |
|
SU1445949A1 |
| Губка схвата манипулятора | 1990 |
|
SU1805032A1 |
| Схват для хрупких деталей | 1984 |
|
SU1284827A1 |
| Губка схвата | 1990 |
|
SU1815212A1 |
| Исполнительный орган манипулятора | 1978 |
|
SU770789A2 |
| АДАПТИВНЫЙ СХВАТ МАНИПУЛЯТОРА | 1991 |
|
RU2021099C1 |
