(54) РУЧКА УПРАВЛЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| РУЧКА УПРАВЛЕНИЯ | 1995 |
|
RU2085993C1 |
| Устройство управления манипуляторами роботохирургического комплекса | 2020 |
|
RU2757969C1 |
| УСТРОЙСТВО ДЛЯ ЭНДОХИРУРГИЧЕСКИХ МАНИПУЛЯЦИЙ | 1995 |
|
RU2096997C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЦЕНТРИРОВАНИЯ ПРИЦЕЛЬНОГО УСТРОЙСТВА И ПОВОРОТНОГО ЭЛЕМЕНТА | 2002 |
|
RU2234040C2 |
| УСТРОЙСТВО РУЧНОГО УПРАВЛЕНИЯ ПОДВИЖНЫМ ОБЪЕКТОМ | 2003 |
|
RU2253593C2 |
| РУЧКА УПРАВЛЕНИЯ ДЛЯ ВОЗДУШНОГО СУДНА | 2013 |
|
RU2611323C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПО АНАЛИТИЧЕСКОЙ ИНФОРМАЦИИ КОМПЕНСАТОРНЫХ ТРУБ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1996 |
|
RU2126305C1 |
| Устройство для ввода информации | 1979 |
|
SU809252A1 |
| Двухкоординатный преобразователь угловых перемещений | 2017 |
|
RU2653117C1 |
| ПУЛЬТ НАВЕДЕНИЯ | 2018 |
|
RU2700367C1 |
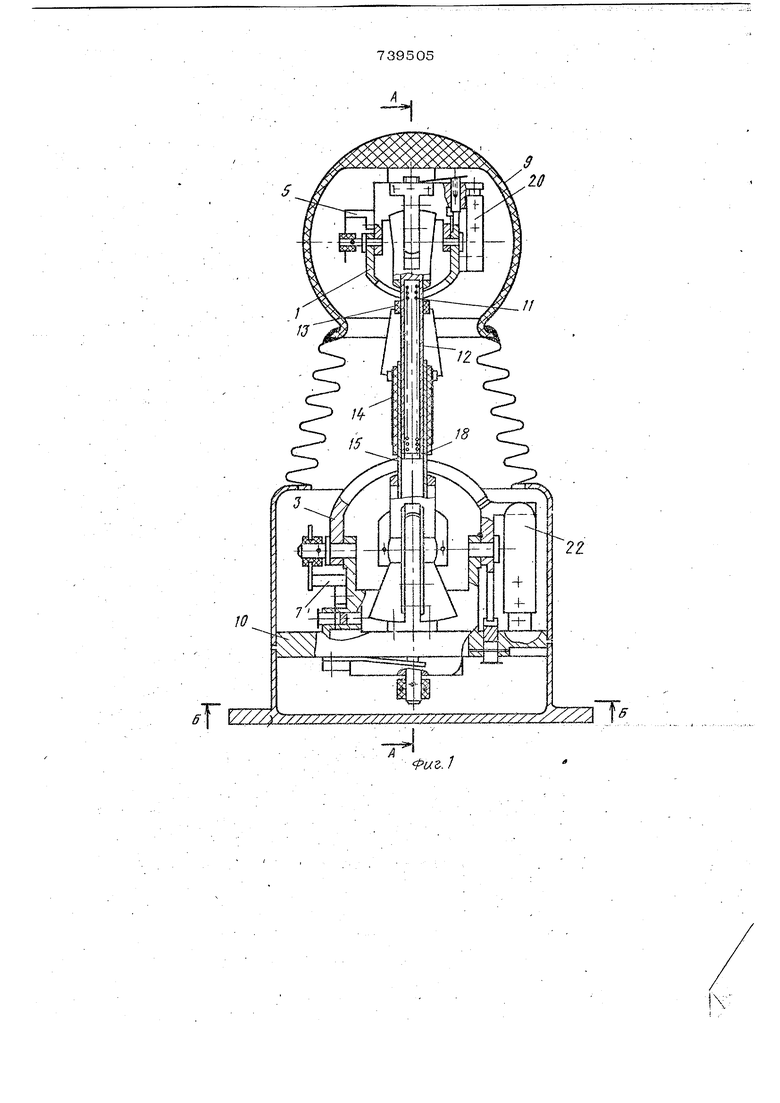
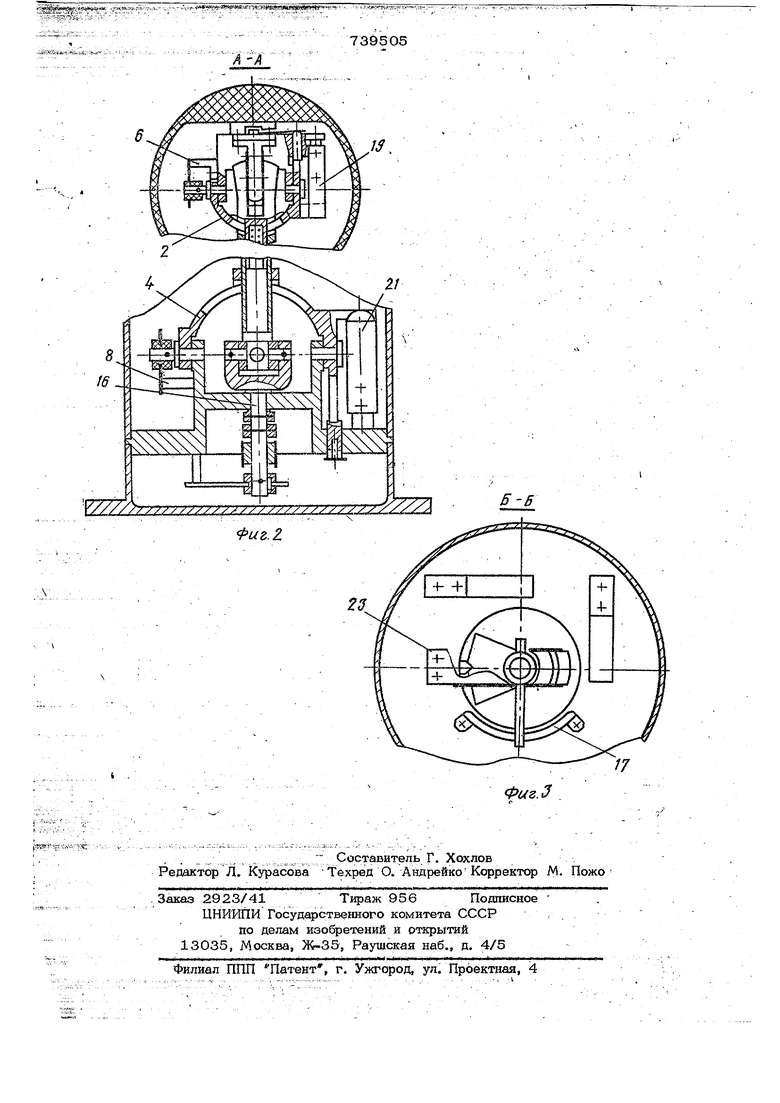
Изобретение относится к машиностроению и может быть использовано во всех отраслях народаого хозяйства, где требуется дистанционное управление шестью сте пенямтй свободы маневрирующего устройс1 ва, например суставами манинулятора, положением объекта в свободном пространств ве. Известны ручки управления в пультах оператора для дистанционного управления различными устройствами по двум, трем степеням свободы 1 . Известна также конструкция ручки управления, содержащая корпус, поворотные дуги, связанные с ведзгщим штоке, соед ненные с переменными резисторами, рукоятку, в которой установлены тумблеры, включающие приводы по одной-двум степеням свободы и механизм фиксации ауг в нейтральном положении 2} . Недостатком известных ручек управления является то, что все они двух-вди трехстепейные. Управление по не достающим степе ням свободы достигается за счет ислюче- ния в рукоятку дополнительных устройств, приводимых в действие пальцами рук (включением тумблеров, кнопок или поворотом движков переменных резисто ров). Это создает значительные трудности отвлекает внимание оператора, нарушает координацию передачи движения, ухудшает мобильность действий оператора в критических ситуагциях при работе с высокоточными маневри-; .рующимн объектами. Целью изобретения является расширение функциональных возможностей известных . ручек управления для независимого управления объектом по каждой из шести степеней свободы одной кистью руки и сокращение ее размеров. Для достижения этой цели в ручке установлены ныходной преобразователь лннейс ного перемещения, дополнительный выходной 1феобразователь углового перемещения и вторая пара взаимно перпендикулярных поворотных дуг, а ведущий Шток выполнен TenecKorfH4ecKHM и связан с второй пйрой взаимно перпендикулярных поворотных дут, 37 размещенных в корпусе ручки управления, причем выходной преобразователь линейного Г1еремеа(ения связан с тел1ескопичеокзтм штоком, одна из втулок которого через карданньгй шаршф связана с дополнительным выходным преобразователем уплового перемещения, причем оси поворота карданного совпадают с сортверствующими осям1Гкачания поворотных Р взаимно перпендикулярных дуг. . , Па фиг. 1 показана предлагаемая pi4- ка управления; на фиг. 2 -i разрез А-А на фиг. 1; на фиг. 3 - разрез Б Бнафиг. 1 Ручка управления содержит две пары поворотных взаимно перпендийулярньк дуг 1, 2 и 3, 4, кинематически сшзанные с
соответствующими выход1-1ыми преооразователями выхошюго перемещения перемен-
ными резисторами 5, 6 и 7, 8. Поворот ные дуги 1 и 2 установлены в корпусе 20 ручки - рукоятке 9, другие две дуги 3 и 4 установлены в узел, крепления ручки , неподвижном корпусе 1О. Между парами поворотных имеется телескопический ведуи1Ий шток, состоящий из двух втулок, 25 подпружиненных ггружиной 11. 13ту.тзса 12 те.тескопического штока кинематически через пазь/ связана с поворотга гми дугами 1 и 2 и на ней установлен движок 13 линейного резистора 14. Резистор 14 уо- 30 тшювлен на втулке 15 телескопического штока. Движок 13 н резистор 14 образуют выходной преобразователБ линейного перемощения. Втулка 15 в свою очередь кинемат1{чески связана через пазы с на- 35 рой дуг 3 и 4 н через управлгпощий Вс глик 16 карданного шарнира с дополнительным выходным преобразователем углового перемещения.- перемеиньм резистором 17, Во втулке 15 телескопического штока уо- 40 тановлен штифт 18, в который ушфается пружина 11 и который находится в пазу, втулки 12 телескопического игтока. Для возвраишния элементов ручки управления
в исходное пбложение на корпусэ,х 45 9 и 10 установлень нульустановители 19-23 пружинного типа, образующие механизм фиксации дуг в нейтральном положении.
Ручка управления работает следующим 50 образом../ .;, ; , . При отклонении рукоятки 9 в ту или иднута сторону (при этом поворачиваются 1 и 2) в систему управления идет сигнал с переменнь х резисторов 5 и 6. 55 При отклонении рукоятки 9 вместе, с тело- . скопическим штсжом дуги 3 и 4 в систощается в исходное положение. Ручка управления позволяет од 1ойкистью руки О№ношэемешю управлять маневрирующим объектом по шести степеням свободы.
Формула изобретения
Ручка управления, содержащая корпус, шток, первую пару поворотных кзаимио перпендикулярных дуг, связанных с ведущим штоком и выходным преобразователем углового перемещения и установлегаагх в узле крепления ручки и механизм фикса1и1и взаимно перпендикулярных дуг в ней1ральном положении, о т л и ч а - ю щ а я с я тем, что, с целью расщи рения области применения, в ней установлены выходной преобразователь линейного перемещения, дополнительный выxoдIiOй щэеобразователь углового перемещения и вторая пара взаимно перпендикулярнь1х поворотных дуг, а ведущий шток выполнен телескопическим и связан с второй парой в.заимно перпендикулярных поворотных дуг, размещенных в корпусе ручки утфавления, причем выходной преобразователь линейно, го перемещения с вязан с телескопическим штоком, одна из втулок которого через карданный шарнир связана с дополнительным выходным преобразователем углового перемещения, причем оси поворота карданного шарнира совпадают с соответствующими осями качания «©воротных взаимно перпендикулярных дуг.
Источники информации, nprniKTbie во внимание при экспертизе
.2. Патент США № 2762234, кл. 74-471, 1966 (прототип).. , 05 му управления идет сигнал с переменн зпх резисторов 7 и 8. При нажатии на рукоятху 9 вту.чка 12 телескопического штока опускается, сжимается пружина 11, и сигнал идет с переменного резистора 14. При враацении рукоят си 9 относительно оси телескопического штока ащается управяйющий валик 16 карданного шарни ра, и соответствующий сигнал с резистора 17 идет в систему управления. Чтобы подать одаогхременно сигналы на управление по нескольким каналам (степенями свободы) необходимо рукояткой 9 (одной кистью руки) сделать соответствующие дви- жения. Под действием пружины 11 и нульустановителей 19-23 рукоятка 9
5
w
г
го
J
иг.1
