(54) УСТРОЙСТВО ДЛЯ ГИБКИ ТРУБ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для гибки труб | 1977 |
|
SU733786A1 |
| Устройство для двусторонней гибки змеевиков | 1979 |
|
SU871892A1 |
| Способ и устройство для гибки тонколистового металла | 2017 |
|
RU2638465C1 |
| Инструмент для гибки труб | 1974 |
|
SU509325A1 |
| Устройство для гибки змеевиков | 1979 |
|
SU876239A1 |
| Устройство для гибки змеевиков из труб | 1979 |
|
SU880561A1 |
| Устройство для двусторонней гибки труб | 1991 |
|
SU1797507A3 |
| ШТАМП ДЛЯ ИЗГОТОВЛЕНИЯ ГНУТЫХ ИЗДЕЛИЙ | 1991 |
|
RU2013170C1 |
| Горизонтально-ковочная машина | 1983 |
|
SU1505657A1 |
| Штамп для гибки | 1986 |
|
SU1315079A1 |
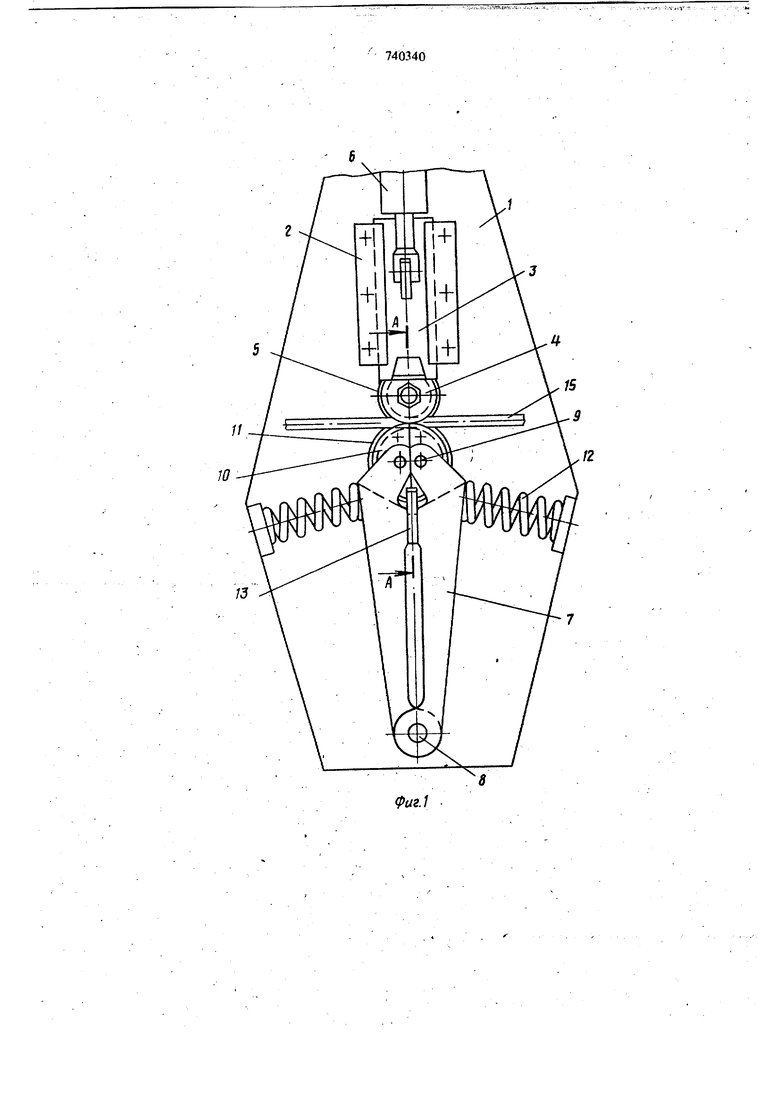
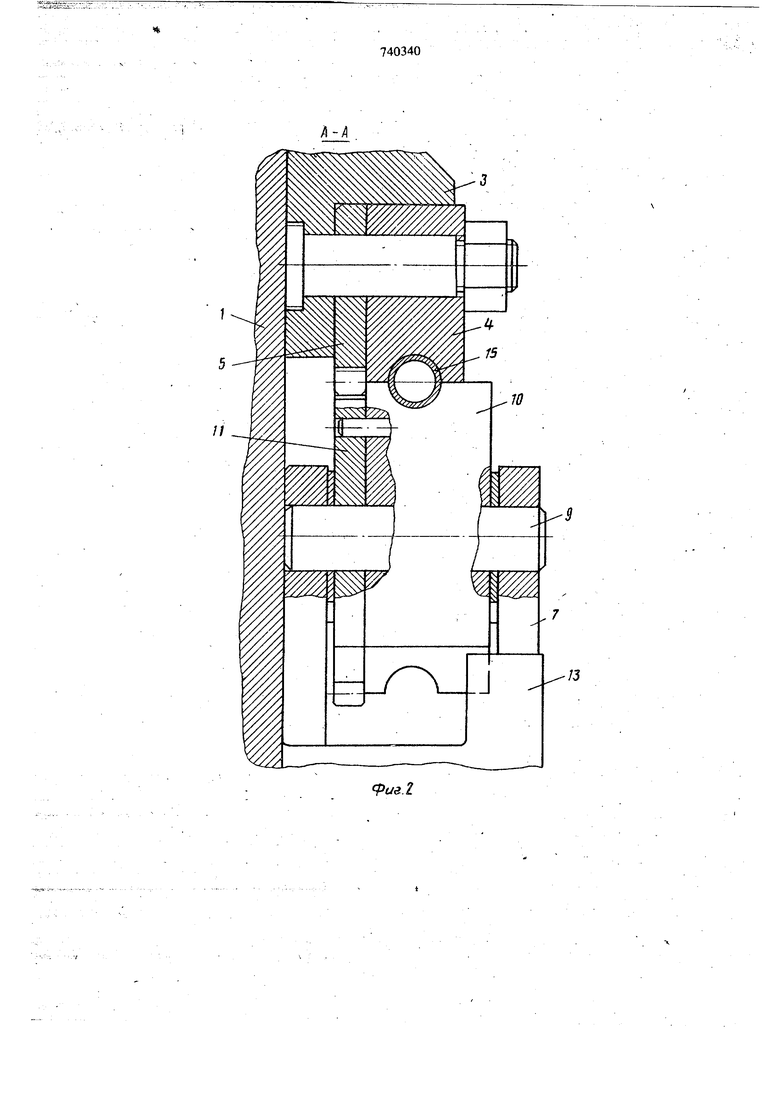
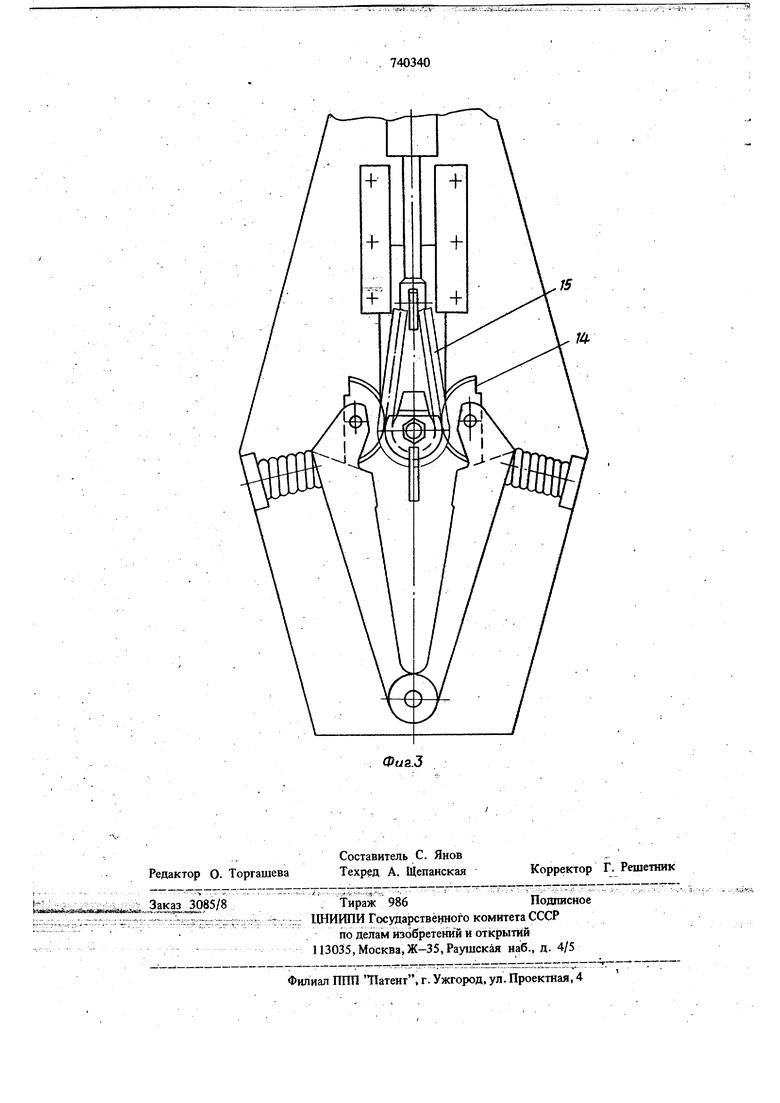
Йзобретение относится к области обработки металлов давлением, в частности к устройствам для гибки труб, и может быть использовано в трубогибочном производстве при изготовлени гнутых элементов трубопроводов различного назначения. Известно устройство для двусторонней гибки труб, содержащее корпус с установленными на нем матрицей и двумя приводными валами, -связанными водилами с матрицами, и гибочными секторами, закрепленными на водилах 11. Недостатком этого устройства является то, что оно имеет сложные кинематические связи а гибочные секторы расположены консольно, что не обеспечивает достаточной их жесткости и точности гибки трубы. Известно также устройство, содержащее основание с размещенными на нем гибочным пуансоном с приводом, симметрично установленными относительно него и связанными с ним зубчатым зацеплением двумя поворотными по;{уматрнцами, буферными элементами 2 Недостатком известного устройства является то, что поворотные полуматрииы закреплены на неподвижных осях в корпусе. Это ограничивает технологические возможности устройства и не обеспечивает гибку труб на угол больше 180° для компенсащи упругих деформаций Т1ри гибЦелью изобретения является обеспечение возможности гибкн труб на угол, больший 180°. Для достижения цепи устройство снабжено двумя рычагами, взаимодействующими с буферными элементами, и фиксатором, а поворотные полуматрицы закреплены на концах рычагов и выполнены в виде двух секторов, образующих при совмещении их по оси снмметрик одно тело вращения и имеющих смещенные относительно оси симметрии оси поворота. На фиг. 1 изображено устройство в исходном положении перед гибкой трубы, общий вид; на фиг. 2 - разрез по А-А на фиг. Г, на фиг. 3 - устройство в конце . гибки трубы, общий вид. На основании 1 в направляющих 2 установлен ползутн 3, несущий гибочный пуансон 4 с жестко закрепленным зубчатым колесом 5. Движение ползуна осуществляется с помощью приводного гидроцилиндра 6, укрепленного на основании. Симметрично относительно пуан сона на поворотных рычагах 7, шарнирно закрепленных на оси 8 основа1шя, смонтирова ны с помоиу ю осей 9 поворотные полуматрицы id, выполненные в виде секторов с жестк закреплёнными на них зубчатыми секторами 1 оси поворота которых расположены эксцентри но. Рьщаги нагружены усилиями буферных элеме тов, выполненных b виде пружин 12. На основании имеется выступ 13, контактирующий с рычагами и уступами 14 на сектора Устройство работает следующим образомТрубную заготовку 15 помещают в зазор, образованный ручьями формующего пуансона 4 и секторов 10. При этом ползун 3 с гибочным пуансоном 4 устанавливается таким об-, разом, чтобы зазор между ручьями пуансона я секторов был бы достаточным для удобной установки заготовки. Йключением гидроцилиндра 6 на рабочий ход ползун 3 совместно с гибочным ггуансоном 4 перемещается по направляющим 2 в направлении к трубной заготовке 15. В момен каса1тя. рабочего ручья гибочного пуансона 4 с трубной заготовкой происходит зацепление зубчатого колеса 5 с зубчатыми секторами 11. При дальнейшем движении ползуна 3 гИбоЧ1Гый пуансон 4 будет раздвигать секторы 10 с рычагами 7 в противоположные стороны, преодолевая усилие сжимаемых при этом- пружин 12, а секторы 10, поворачиваясь вокруг осей 9, будут .обкатывать пуансон 4 и изгибать трубу.,. Усилие и Жесткость пружин 12 должны быт такими, чтобы усилия в местах контакта секторов с изгибаемой грубрй, направленные к центру гибочного пуансона 4 всегда были больше сил реакции изгибаемой трубы. 04 Изогнув трубу на заданный угол с учетом упру1Ч)й деформации, включают гвдроцилиндр 6 на обратный ход. Гибочный пуансон и секторы 10 возвращаются в исходное положение, U изогнутая труба удаляется или устанавливается в новое положение для гибки. На время, когда зубчатое колесо 5 и зубчатые, секторы 11 выходят из зацепления, симмегричное положение секторов Ю и рычагов 7 обеспечивается выступом 13, который ограничивает ход рычагов и поворот секторов вокруг осей 9. Изобретение позволяет расширить технологические возможности гибочного устройства и обеспечивает гибку труб на угол 180° и боле.е. При зтом позволяет создать более простое По конструкции устройство для гибки труб. Формула изобретения Устройство для гибки труб,содержащее размещенные на основании гибочный пуансон, симметрично установленные относительно него и связанные с ним зубчатым зацеплением две поворотные полуматрицы и буферные элементны, отличающее.с я тем, что, с целью обеспечения возможности гибки труб на угол, больше 180°, оно снабжено двумя рычагами, взаимодействующими с буферными элементами, и фиксатором их положения, а поворотные полуматрицы закреплены на концах рычагов и выполнены в виде двух секторов,образующих при совмещении их по оси симметрии одно тело вращения и имеющих смещенные относительно оси симметрии оси поворота. Источники информации,. . принять1е. во внимание при экспертизе 1.Авторское свидетельство СССР N 267311, кл. В 21 D 7/02, 1966. 2.Авторское свидетельство СССР № 509325, кл. В 21 D 7/02, 1974.
J3
IB
(раг.1
