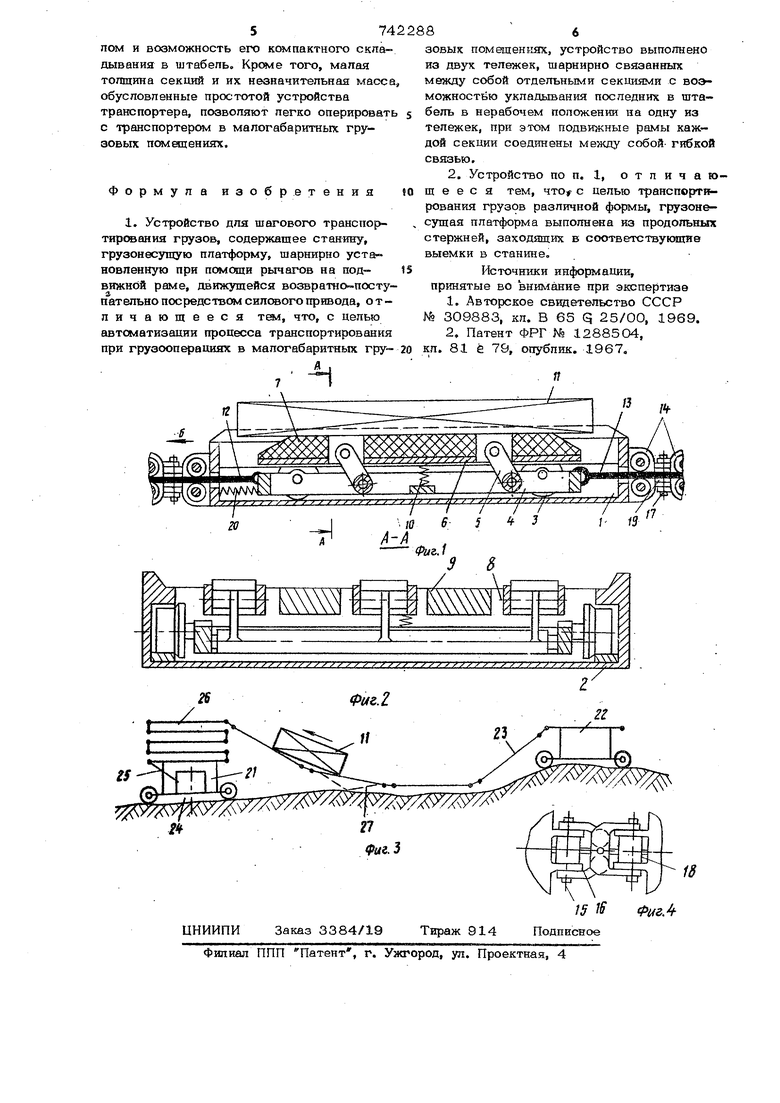
гибкой связью, а грузонесушая платформа выполнена из нродольных стержней, заходящих в соответствующие выемки в станине. На фиг. 1 изображена секция транспортера, продольный разрез; на фиг. 2 разрез А-А на фиг. 1; на фиг. 3 один из возможных вариантов составления из секций транспортера; на фиг. 4 - шарнирное ycTpoftcTBOf соединяющее секции, вид сверху. Устройство выполнено из секций, каждая из которых состоит из станины 1 с направляющими 2, по которым могут перемещаться катки 3 рамы 4. На раме 4 с помощью шарнирных рычагов 5 укреплена грузонесущая платформа, состоящая из продольно распопо кенных стержней 6. Стержни 6 снабжены для увеличения сцеп ления резиновыми вкладышами 7, причем каждый из них входит в паз 8, образован ный между планками 9 составтшннцкми верхнюю опорную часть станину 1. Стерж ни подпружинены пруэкиной 10, причем иоследняя уравновешивает массу платформы и создает небольшое избыточное давление на груз Ц величиной в несколько десятков грамм. Рама секиии связана с соседними секциями гибкими связями 12 и 13. Станины секши связаны между собой шарнирными соединениями, состоящими из приваренных к станине щек i4 и свободно поворачивающихся на осях 15 обойм 16, шарнирно связанных ме5кду собой налышми 17. Для проводки связей 12, 13 нрилк1бом положении секции по отношению одной к другой служат ропшси 18, 19. Между станиной я рамой уотанов пена пружина 20, стремящаяся сдвинуть раму в направлении, обратном стрелке Б. На фиг. 3 даны .концевые тележки 21, 22, к которым присоединены секции 23, устройство которых показано на фиг. 2 Одна из тележек сна;бжена силовым приво дом 24. Привод может представлять собой гидроцилиндры иди электроприводной эксцентриковый механизм, служащий для попеременного натягивания и ослабления гибкой связи 2 5, подобной связи 12, и идущи от последней секции. Секции в нерабочем положении могут укладываться на одну из тележек & штабель 26, а в рабочем положении растягиваться между тележками, причем для поддерживания в промежутках секции могут быть снабжены откидными ножами 27 (показаны штрих-пунктирными пиниями). Эксцентриковый или любой другой механизм привода должен быть ВЬ полнен так, чтобы движение рамы по стрелке Б происходило с некоторым, хотя бы незначительным ускорением. Указанное условие может быть без труда выполнено при проектировании силовой части известными методами. Работает устройство следующим образом. Транспортер устанавливают а рабочее положение, включают силовой привод 24, который придает гибкой связи 25 , возвратно-поступательное движение. В пределах первой секции, лежащей на тележке 21, связь 25 переходит в участок связи 12. Воздействуя на раму 4, связь 12 заставляет ее совершать возвратнопоступательное движение в пределах станины, причем катиться на катках 3 по направл51ющим 2. Движение в направлении, показанном стрелкой Б, происходит за счет натяжения связи. 12, а возврат рамы - за счет пружины 20. Связь 13 передает движение в следующую секцию и таким образом приводятся в возвратнопоступательное движение рамы всех сек- дий одновременно. Поскольку платформа слегка прижимается пружиной 10 к грузу 11, то при движении рамы по стрелке Б рычаги 5 подвоздействием сил инерции от.масс платформы и груза развертываются по часовой стрелке и тем самым плотно прижимают платформу к грузу. Движение рамы по стрелке Б происходит с некоторым ускорением и поэтому груз теряет контакт с верхом станины 1 и таким образом за счет сцепления с грузонесущей платформой продвигается по стрелке Б на величину хода связи. При ослаблении связи 12 пружина возвра1цает раму в исходное положение, причем рычаги 5, разворачиваясь против часовой стрелки в результате действия сил инерьции массы грузонесушей платформы, отводят последнюю от груза. При очень малых ускорениях грузонесущая платформа при обратном движении может прижиматься к грузу под воздействием пружины 1О, однако величина нажатия очень мала и груз остается на месте, удерживаясь трением о стержни6 станины. При повторении движения связи груз будет перемещаться в направлении стрелки Б. Благодаря наличию шарниров секции транспортера могут принимать по отношению одна к другой различные положения в пространстве, чем обеспечивается пространственная гибкость транспортера в целом и возможность его компактного складывания в штабель. Крсж1е того, малая толщина секций и их незначительная масса обусловленные простотой устройства транспортера, позволяют легко оперироват с транспортером в малогабаритных грузовых помещениях. Формула изобретения 1, Устройство для шагового транспортирования грузов, содержащее стан-ину, грузонесущую платформу, шарнирно установленную при псжющи рычагов на подвижной раме, движущейся возвратно«-посту пательнопосредственСИП1ЖОГОпривода, отличающееся тем, что, с цепью автоматизации процесса транспортирования при грузооперациях в малогабаритных гру Г /}зовых помацениях, устройство выполнено из двух тележек, шарнирно связанных между собой отдельными секциями с воэможностёю укладывания последних в штабель в нерабочем попож.ении на одну из тележек, при этом подвижные рамы каждой секции соединены между собой- гибкой связью, 2. Устройство по п. 1, отличающ е е с я тем, что. с целью транспортирования грузов различной формы, грузонесущая платформа выполнена из продольных стержней, заходящих в соответствующие выемки в станине, Источники информации, принятые во внимание при экспертизе 1.Авторское сввдетельство СССР № 309883, кп. В 65 q 25/00, 1969. 2,Патент ФРГ № 12885О4, кп. 81 ё 79, опублик. 1967, 7 7 / / / ,j /3 е S и&.1 3 В

| название | год | авторы | номер документа |
|---|---|---|---|
| Распределительный тележечный конвейер | 1990 |
|
SU1770230A1 |
| Тележечный конвейер | 1987 |
|
SU1447718A1 |
| Устройство для укладки в стопу плоских предметов | 1975 |
|
SU648432A1 |
| БИБЛИОТЕКА 1Р. Я. Чуфарин | 1972 |
|
SU331980A1 |
| Устройство для перегрузки тарных грузов | 1987 |
|
SU1532485A1 |
| Вертикальный четырехцепной конвейер для штучных грузов | 1985 |
|
SU1276583A1 |
| Конвейерный поезд | 1975 |
|
SU594338A1 |
| МАШИНА ДЛЯ ПОГРУЗКИ ШТУЧНЫХ ГРУЗОВ В ВАГОНЫ | 1969 |
|
SU238400A1 |
| Транспортно-технологическая линия | 1987 |
|
SU1544681A1 |
| Устройство торможения на гравитационных стеллажах грузов | 1989 |
|
SU1684182A1 |
