Изобретение относится к машиностроению и может найти применение для автоматического направления движения самоходных машин.
Цель изобретения - повьшение точ- ности вождения машины.
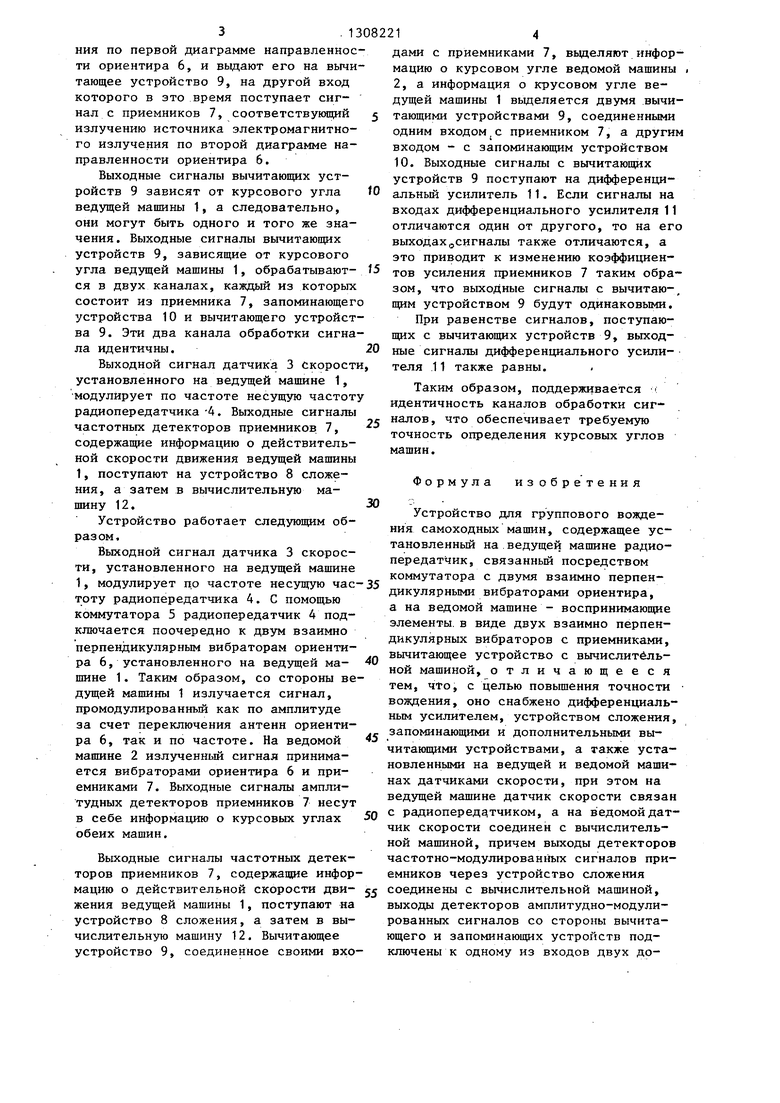
На фиг.1 представлена схема управления ведущей машины; на фиг.2 - то же, ведомой машины.
Устройство для группового вожде- ния самоходных машин состоит из ведущей машины 1, ведомой машины 2,да1 чиков 3 скорости, установленных на ведущей 1 и ведомой 2. машинах. Датчик 3 скорости, установленный на ведущей машине 1, связан с радиопередатчиком 4, который посредством коммутатора 5 соединен с двумя взаимно перпендикулярными вибраторами ориентира 6.
На ведомой машине 2 каждый вибратор ориентира 6 аналогичен ориентиру установленному на ведущей машине 1, подключен к своему приемнику 7, имеющему выходы как амплитудного, так и частотного детекторов.
Выходы частотных детекторов приемников 7 подключены к устройству 8 сложения, необходимого для устране- ния влияния диаграмм направленности вибраторов ориентиров 6 на уровень выходного сигнала с частотного детектора, а.выходы амплитудных детекторов приемника 7 подключены к входам вычитающих 9 и запоминающих 10 устройств, служащих для обработки принятых приемниками 7 сигналов. Выходы вычитающих устройств 9 соединены с входами дифференциального усилителя 11, который определяет величину рассогласования в идентичных каналах обработки сигналов, каждый из которых состоит из приемника 7, вычитающего 9 и запоминающего 10 устройств.
Датчик 3 скорости ведомой машины .2, устройство 8 сложения и выходы вычитающих устройств 9 соединены с вычислительной машиной 12. Датчики 3 скорости машин должны быть корреляционного типа, что позволяет с большой точностью измерять действительную скорость движения как колесных, так и гусеничных машин.
Устройство работает следующим образом.
На ведущей машине 1 радиопередатчик 4 посредством коммутатора 5 поочередно подключается к антеннам ори
ентира 6. Таким образом, на ведущей машине 1 создаются равносильные направления в сторону ведомых машин путем последовательного излучения по двум характеристикам направленности, которые пересекаются в задаваемых направлениях. На ведомой машине 2, находящейся в поле излучения ориентира 6, с помощью аналогичного орентира 6 и приемников 7 с идентичными характи- ристиками вьщеляются принимаемые сигналы, причем каждая антенна ориентира
6,установленного на ведомой машине, подключена к собственному приемнику
7,т.е. используя две диаграммы направленности и сравнивая интенсивность приема на них, можно определить угол прихода злектромагнитной волны. При изменении угла прихода волны соотношение интенсивностей принятых сигналов изменяется в зависимости от угла прихода волны, причем в любых направлениях, кроме равносигнального, сигнал одного приемника преобладает над сигналом другого и только в равносиг- нальном направлении имеет равенство сигналов.
На ведомой машине 2 сравнение интенсивностей выходных сигналов приемников 7 осуществляется вычитающими устройствами 9.
Выходной сигнал вычитающего устройства 9, соединенного своими входами с приемниками 7, зависит только
ОТ курсового угла ведомой машины 2, так как на ведущей машине 1 установ-. лен источник электромагнитного излучения, создающий равносигнальные направления в сторону ведомой мащины 1, используя всего одну из антенн ориентира 6, установленного на ведомой машине 2. Отклонение равносигнальных направлений от направления на ведомую машину 2 сопровождается появлением разности уровней принятых сигналов, т.е. сигналы на выходе приемников 7 будут амплитудно-модулиро- ванными.
50
55
Если равносигнальные направления, создаваемые источником электромагнитного излучения на ведущей машине 1, совпадают с направлением на ведомую машину 2, то глубина модуляции выходных сигналов приемником 7 равна нулю.
Запоминающие устройства 10 запоминают уровень сигналов, излученного источником электромагнитного излуче
ния по первой диаграмме направленности ориентира 6, и выдают его на вычитающее устройство 9, на другой вход которого в это время поступает сигнал с приемников 7, соответствующий излучению источника электромагнитного излучения по второй диаграмме направленности ориентира 6.
Выходные сигналы вычитающих устройств 9 зависят от курсового угла ведущей машины 1, а следовательно, они могут быть одного и того же значения. Выходные сигналы вычитающих устройств 9, зависящие от курсового угла ведущей машины 1, обрабатывают- ся в двух каналах, каждый из которых состоит из приемника 7, запоминающего устройства 10 и вычитающего устройства 9. Эти два канала обработки сигнала идентичны.
Выходной сигнал датчика 3 скорости установленного на ведущей машине 1, модулирует по частоте несущую частоту радиопередатчика 4. Выходные сигналы частотных детекторов приемников, 7, содержащие информацию о действительной скорости движения ведущей машины 1, поступают на устройство 8 сложения, а затем в вычислительную машину 12.
Устройство работает следующим образом.
Выходной сигнал датчика 3 скорости, установленного на ведущей машине 1, модулирует до частоте несущую час- тоту радиопередатчика 4. С помощью коммутатора 5 радиопередатчик 4 подключается поочередно к цвум взаимно перпендикулярным вибраторам ориентира 6, установленного на ведущей ма- шине 1. Таким образом, со стороны ведущей машины 1 излучается сигнал, промодулированный как по амплитуде за счет переключения антенн ориентира 6, так и по частоте. На ведомой машине 2 излученный сигнал принимается вибраторами ориентира 6 и приемниками 7. Выходные сигналы амплитудных детекторов приемников 7 несут в себе информацию о курсовых углах обеих машин.
Выходные сигналы частотных детекторов приемников 7, содержащие информацию о действительной скорости дви- j соединены с вычислительной машиной, жения ведущей машины 1, поступают на выходы детекторов амплитудно-модули- устройство 8 сложения, а затем в вы- рованных сигналов со стороны вычита- числительную машину 12. Вычитающее ющего и запоминающих устройств под- устройство 9, соединенное своими вхо- ключены к одному из входов двух до5
O 5 0
0
5 0 5 0
дами с приемниками 7, вьщеляют информацию о курсовом угле ведомой машины i 2, а информация о крусовом угле ведущей машины 1 выделяется двумя вычитающими устройствами 9, соединенными одним входом J с приемником 7, а другим входом - с запоминающим устройством 10. Выходные сигналы с вычитающих устройств 9 поступают на дифференциальный усилитель 11. Если сигналы на входах дифференциального усилителя 11 отличаются один от другого, то на его выходах сигналы также отличаются, а это приводит к изменению коэффициентов усиления приемников 7 таким образом, что выходные сигналы с вычитаю-, щим устройством 9 будут одинаковыми. При равенстве сигналов, поступающих с вычитающих устройств 9, выходные сигналы дифференциального усилителя .11 также равны.
Таким образом, поддерживается f идентичность каналов обработки сигналов, что обеспечивает требуемую точность определения курсовых углов машин.
Формула изобретения
Устройство для группового вождения самоходных машин, содержащее установленный на.ведущей машине радиопередатчик, связанный посредством коммутатора с двумя взаимно перпендикулярными вибраторами ориентира, а на ведомой машине - воспринимающие элементы, в виде двух взаимно перпендикулярных вибраторов с приемниками, вычитающее устройство с вычислительной машиной, отличающееся тем, что, с целью повышения точности вождения, оно снабжено дифференциальным усилителем, устройством сложения, запоминающими и дополнительными вычитающими устройствами, а также установленными на ведущей и ведомой машинах датчиками скорости, при этом на ведущей машине датчик скорости связан с радиопередатчиком, а на ведомой датчик скорости соединен с вычислительной машиной, причем выходы детекторов частотно-модулирован1шх сигналов приемников через устройство сложения
полнительных вычитающих устройств, причем выходы запоминающих устройств соединены с другими входами дополнительных вычитающих устройств, а выходы этих вычитающих устройств посредством дифференциального усилителя
Редактор Г.Волкова
Составитель А.Сапоженков
Техред Л. Сердюкова Корректор Е.Рошко
1650/1
Тираж 630Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
.Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
подключены к входам автоматической регулировки усиления приемников, при этом выход вычитающего устройства и выход одного из дополнительных вычитающих устройств соединены с вычислительной машиной.
{Риг.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для группового вождения самоходных сельскохозяйственных машин | 1981 |
|
SU969187A2 |
| Система для группового вождения самоходных сельскохозяйственных машин | 1984 |
|
SU1197573A1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУППОВЫМ ВОЖДЕНИЕМ МАШИН | 1999 |
|
RU2172085C2 |
| Система для группового вожденияСАМОХОдНыХ СЕльСКОХОзяйСТВЕННыХМАшиН | 1979 |
|
SU818518A1 |
| Система для группового вождения самоходных сельскохозяйственных машин | 1978 |
|
SU743612A1 |
| Система для группового вождения самоходных сельскохозяйственных машин | 1987 |
|
SU1531874A1 |
| СПОСОБ ГРУППОВОГО ВОЖДЕНИЯ ДОРОЖНЫХ ДРОНОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2662297C1 |
| Способ радиолокации | 2022 |
|
RU2797828C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ГРУППОВОГО ВОЖДЕНИЯ ДОРОЖНЫХ МАШИН И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2664033C1 |
| Система группового управления самоходными агрегатами | 1982 |
|
SU1061716A2 |

Изобретение относится к машиностроению. Цель изобретения - повьше- ние точности вождения машин. Устройство для группового вождения самоходных машин состоит из ведущей машины 1 с радиопередатчиком 4. Радиопередатчик 4 ведущей машины 1 посредством коммутатора 5 соединен с двумя взаимно перпендикулярными вибраторами ориентира 6 На ведомой и ведущей машинах вибраторы ориентира конструктивно выполнены одинаково. Приемник сигнала на.ведомой тележке соединен с вибратором ориентира. На ведущей машине 1 и ведомой машине установлены датчики 3 скорости. Устройство обработки сигналов на ведомой машине снабжено дифференциальным усилителем, устройством сложения, запоминающими и дополнительными вычитающими устройствами. Устройство позволяет измерять курсовые углы обеих машин. 2 ил. i (Л 9uг.f
| Система управления процессомпЕРЕгРузКи МАТЕРиАлА | 1979 |
|
SU818515A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
