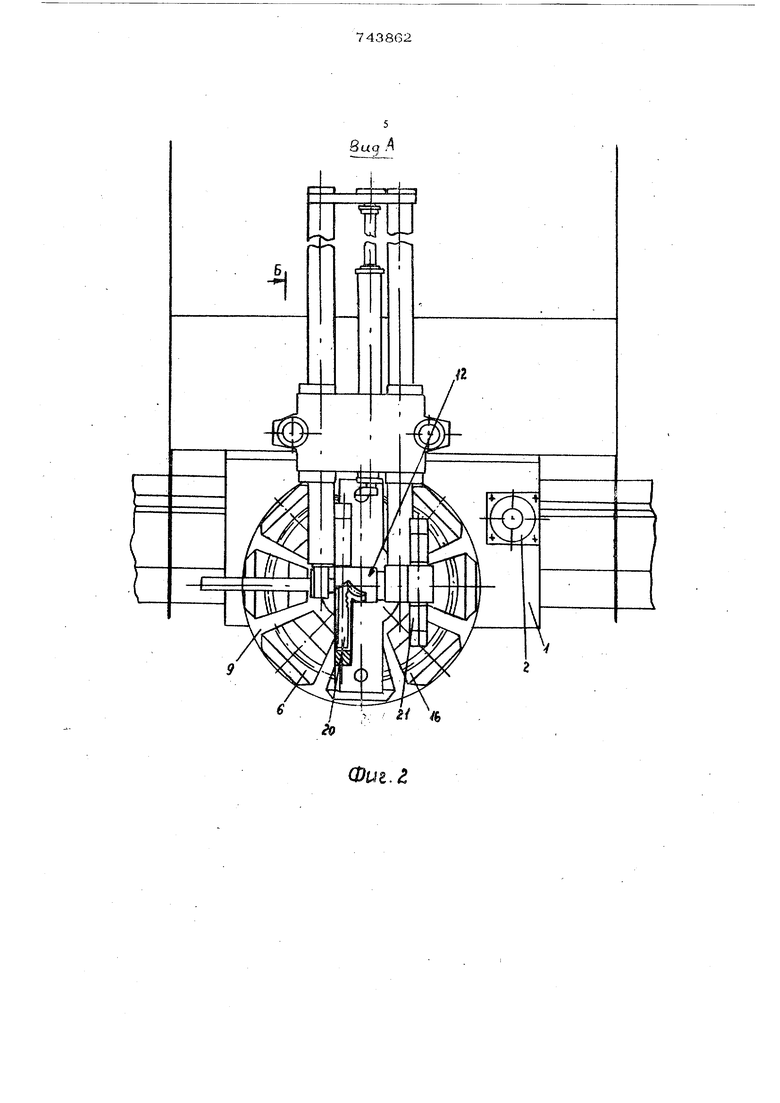
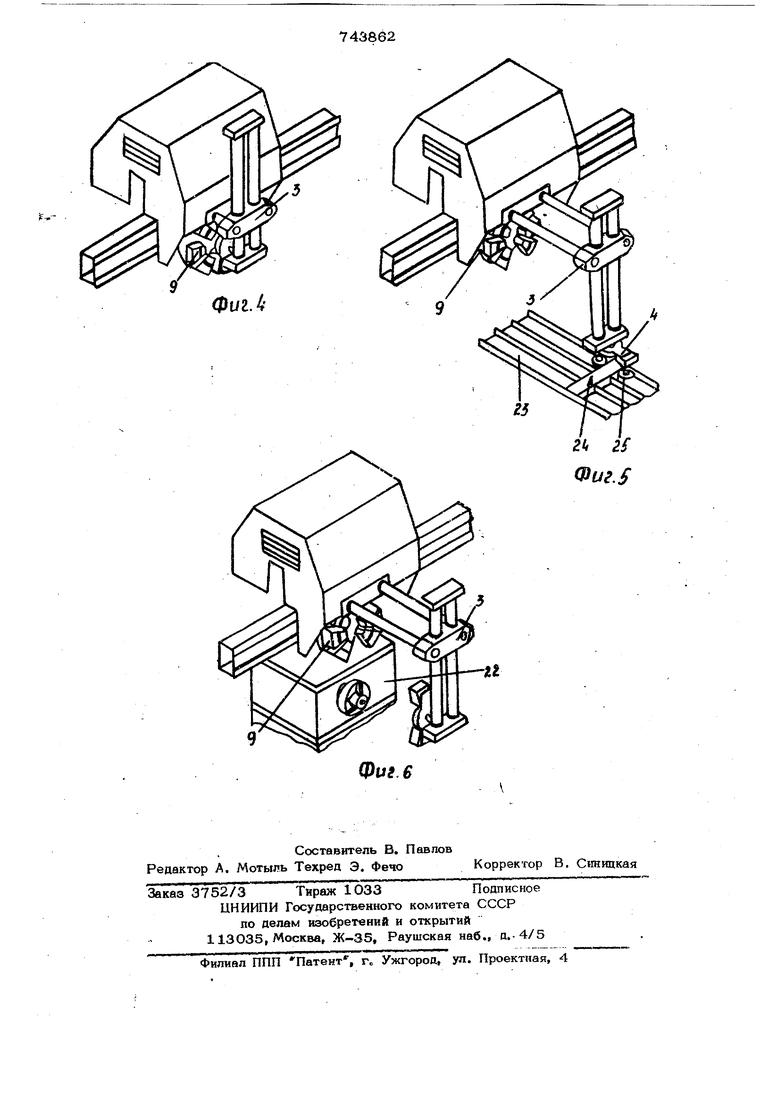
Изобретение относится к машиностроению, а именно к промышленным роботам и манипуляторам, предназначенным для автоматизации загрузочно-разгруаочных операций станков. Известен промышленный робот для автоматизации загрузочно-разгрузочных работ, смонтированный на тележке, подвижной вдоль направляющих, содержащий установленную на корпусе механическую руку со звеньями, поступательно перемещающимися в плоскости, перпендикулярной направляющим и шарнирно установленное на последнем звене запястье с элементами крепления захватов, ось поперечного шарнира которого перпендикулярна, а ось продольного,шарнира - параллельна плоскости перемещения звеньев руки 1J. Недостатком указанного лромыщленноГО робота является незначительные техно логические возможности выполнения заfгрузки-разгрузки стпнков деталями только близких типоразмеров, что ведет к дл тельным простоям оборудования при смене захватов для других типоразмеров. Наиболее близким к изобретению по технической суцшости является манипуля- / тор, смонтированный на тележке, подвижной вдоль направляющих, в котором некоторое расширение технологических возможностей производится при помощи магазина сменных рабочих органов с элементами крепления захватов, закрепленный на корпусе 2. Недостаток указанного манипулятора заключается в том, что он не обладает широкими технологическими возможностями, сложен-по конструкции и имеет значительные габариты. Цель изобретения - расширение технологических возможностей, упрощение конструкции и сокращение габаритов. Указанная цепь достигается тем, что запястье выполнено в виде двуплечего рычага, элементы крепления захватов на запястье расположены симметрично относительно оси его продольного шарнира, магазин смонтирован на оси, совмещенной с плоскостью перемещения продольного шарнира запястья, и имеет элементы креп ления сменных захватов в этом магазине, которые смонтированы попарно на пересеченаях прямых, проходящих через центр магазина, с окружностью, диаметр которой равен расстоянию между элементами крепления захватов на запястье. На фиг. 1 изображен промыщленный робот, общий вид; на фиг, 2 - вид по стрелке А на фиг, 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - промышленный робот в работе, положение смены захватов; на фиг. 5 - то же, положение при захвате детали; на фиг. 6 - то же, положен ие установки детали в станок. Промышленный робот смонтирован на тележке 1 с приводом 2, подвижной вдоль направляющих (на чертежах не обозначены). Робот содержит установленную на корпусе механическую руку 3 со звеньями поступательно перемещающимися в плоскости, перпендикулярной направляющим, шарнирно установленное на последнем звене запястье 4 с элементами 5 крепления сменных захватов 6. Ось поперечного шар нира 7 расположена перпендикулярно плоскости перемещения звеньев механической руки, ось продольного шарнира 8 расположена параллельно плоскости перемещения звеньев механической руки. Роторный магазин 9 закреплен на корпусе тележки 1 и снабжен делительным диском 1О. Запястье 4 выполнено в виде двуплечего рычага, элементы 5 крепления захватов на запястье расположены симметрично относительно оси продольного шарнира 8. Магазин 9 снабжен кодовыми гребенками 11, его ось 12 поворота совмещена с плоскостью перемещения продольного шарнира 8 запястья 4, элементы 13 в магазине 9 смонтированы попарно на пересе чениях прямых, проходящих через центр оси 12 с окружностью диаметр которой равен расстоянию между элементами 5 крепления захватов 6 на запястье 4. Сменные захваты 6 имеют на торцовой по верхности 14 Т-образные пазы 15, образующие кольцевую проточку 16. Магазин 9 снабжен блоком 17 опознания и приводом 18. На элементах 5 крепления сменных захватов находятся Т-образные прихваты 19 и узел зажима деталей в захватах 6, Двуплечий рычаг запястья 4 связан с механической рукой 3 зубчато-реечными передачами 20 и 21, обеспечивающими ему поворот в фронтальной плоскости на 180 и в профильной плоскости на 9О°. Участок, обслуживаемый промыщленным роботом, включает несколько токарных программных станков 22 и магазин - питатель 23, на koTopoM установлены заготовки 24 и готовые детали 25. Промышленный робот работает следуюшим образом. Перемещаясь по направляющим, робот опознает задаваемые ему адреса станков 22 и соответствующих им лотков магазина питателя 23, выполняющего функции промежуточного склада, Выбор и смена нужной пары захватов 6 и закрепление их на двуплечем рычаге запястья 4 происходит за счет передачи вращения поворотного диска магазина 9, который вращается до тех пор, пока по задан«° программе от кодовых гребенок 11 не происходит опознание блоком 17 необходимой пары захватов 6, после чего Тобразные прихваты 19 срабатывают, прижимая захваты 6 на запястье 4 механической руки 3. Механическая рука 3 снимает с элементов 13 захваты 6 и перемещает их к магазину -питателю 23, на котором отыс « программе заданную заготовку 24 и с помощью узла зажима закрепляет ее в захвате 6, Взяв захватом 6 заготовку 24, робот несет ее к станку 22. Опустив механичесКую руку 3, робот снимает готовую деталь 25 свободным захватом 6, поворачивает рычаг запястья 4 на 180 и вставляет вместо готовой детали принесенную заготовку 24. Готовую деталь 25 робот относит в магазин - накопитель 23. Робот возвращает захваты 6 в магазин 9, ищет согласно программе другую пару захватов 6 и обслуживает другой станок. Формула изобретения Промышленный робот, смонтированный на тележке, подвижной вдоль направляющих, содержащий установленную на корпусе механическую руку со звеньями, поступательно перемещающимися в плоскости, перпендикулярной направляющим, шарнирно установленное на последнем звене руки запястье с элементами крепления захватов, ось поперечного шарнира которого перпендикулярна, а ось продольного его шарнира параллельна плоскости перемещения 574 звеньев руки, и закрепленный на корпусе , магазин с элементами крепления захватов отличающийся тем, что, с целью расширения технологических возможностей, упрощения конструкции и сокращения габаритов, запястье выполнено в вице двуплечего рычага, элементы крепления захватов на запястье расположены симмет рично относительно оси его продольного шарнира, магазин смонтирован на оси, совмещенной с плоскостью перемещения процольного шарнира запястья, и имеет элементы крепления сменных захватов в этом 2 магазине, которые смонтированы попарно на пересечениях прямых, проходяопп через центр оси магазина, с окружностью, диаметр которой равен расстоянию между элементами крепления захватов на запястье. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 453292, кл. В 25 У 5/О2, 1972. 2. Манипуляторы. Каталог-справочник. Л., 1972, с. 112.
Фиг/ Saa. г/
Фщ. Ve
Фи$.3


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для загрузки металлорежущего станка | 1986 |
|
SU1360967A1 |
| Способ управления исполнительным механизмом робота-манипулятора с силомоментной обратной связью и устройство для его осуществления | 2018 |
|
RU2699703C1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| Устройство автоматической смены инструмента | 1986 |
|
SU1458145A1 |
| КОНТРОЛЛЕР ЗАПЯСТЬЯ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2718568C1 |
| Станок с устройством автоматической смены инструмента | 1988 |
|
SU1743787A1 |
| Транспортный промышленный робот | 1987 |
|
SU1743845A1 |
| Манипулятор | 1986 |
|
SU1321581A1 |
| Автооператор для смены инструментальных наладок | 1986 |
|
SU1426744A1 |