(54) БУРОВАЯ КАРЕТКА
| название | год | авторы | номер документа |
|---|---|---|---|
| Бурильный агрегат | 1980 |
|
SU1002570A1 |
| Буровая стрела | 1978 |
|
SU729345A1 |
| Буровая каретка | 1975 |
|
SU603747A1 |
| Агрегат бурильный | 1980 |
|
SU1002569A1 |
| БУРОВАЯ ГИДРАВЛИЧЕСКАЯ СТРЕЛА | 1972 |
|
SU340777A1 |
| Буровая стрела | 1973 |
|
SU573583A2 |
| Устройство автоматического управления гидравлическим экскаватором | 1988 |
|
SU1641953A1 |
| Рабочее оборудование гидравлического экскаватора | 1985 |
|
SU1302000A1 |
| Гидропривод управления экскаваторным оборудованием | 1978 |
|
SU768896A1 |
| Устройство для погрузки породы при проходке горных выработок | 1989 |
|
SU1745973A1 |
I
Изобретение относится к горной промышленности, в частности к буровым кареткам, используемым для бурения шпуров при ведении проходческих и очистных работ.
Известна буровая каретка, содержащая раму со стойкой, маслонасосную станцию, буровые стрелы, каждая из которых включает рукоять, шарнирно связанную с колонной и направляющей, силовые гидроцилиндры наклона и поворота направляющей и гидроцилиндр надвигания 1.
Недостатком этой конструкции является увод конца направляющей от вертикальной плоскости как при наклоне, так и при повороте стрелы. Для компенсации увода оператору необходимо осуществлять перемещение направляющей в направлении плоскости забоя с помощью цилиндра надвигания, что требует от бурильщика дополнительных затрат времени.
Наиболее близкой по технической сущности и достигаемому результату к предлагаемой является буровая каретка, содержащая раму со стойкой, маслонасосную станцию, следящий привод, буровые стрелы, каждая из которых включает рукоять, шарнирно связанную с колонной и направляющей, силовые и пилотные гидроцилиндры подъема и поворота рукояти, гидроцилиндры наклона и поворота направляющей и гидроцилиндр надвигания 2.
Недостатком известной каретки являют5 ся большие затраты времени на вспомогательные операции.
Цель изобретения - сокращение времени на в.спомогательные операции при бурении посредством автоматической компенсации увода конца направляющей от забоя.
10 Цель достигается тем, что стрелы снабжены дополнительными гидроцилиндрами, , которые посредством вилок и пальцев соединяют рукоять и стойку с колонной и решающим механизмом, включающим гидроцилиндры со взаимно перпендикулярными ося15ми, закрепленными на раме и соединенными шарнирной тягой со следящим приводом, причем полости дополнительных гидроцилиндров решающего механизма сообщены между собой.
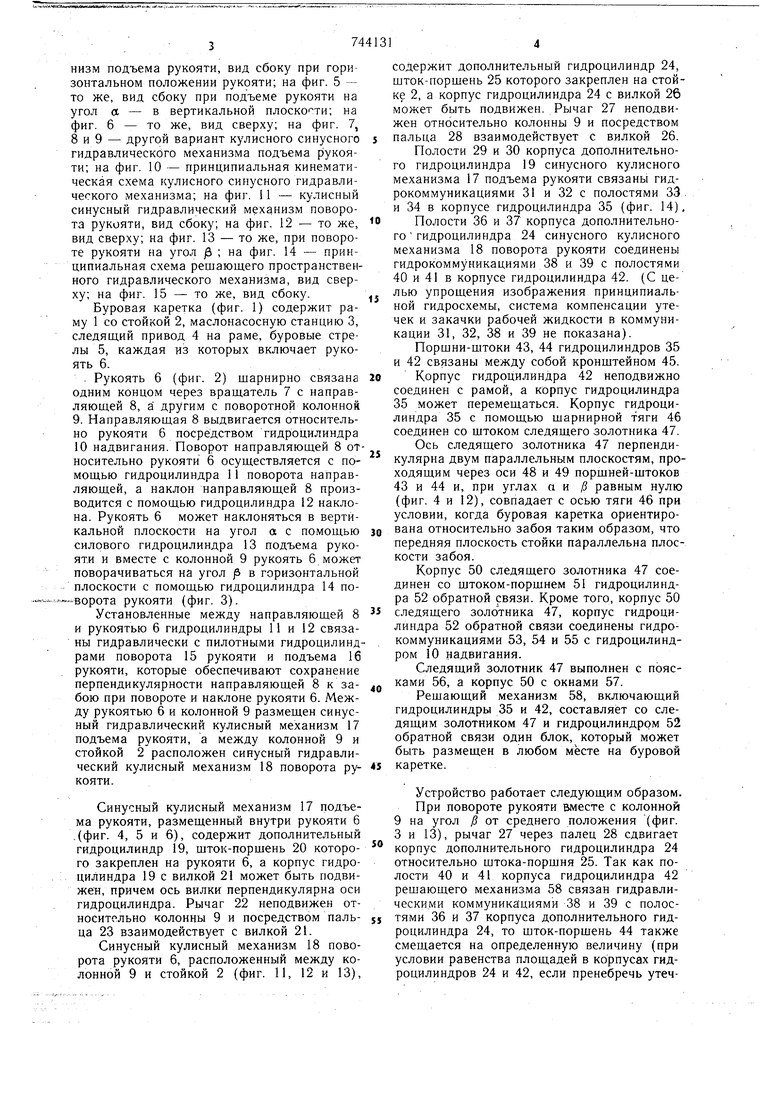
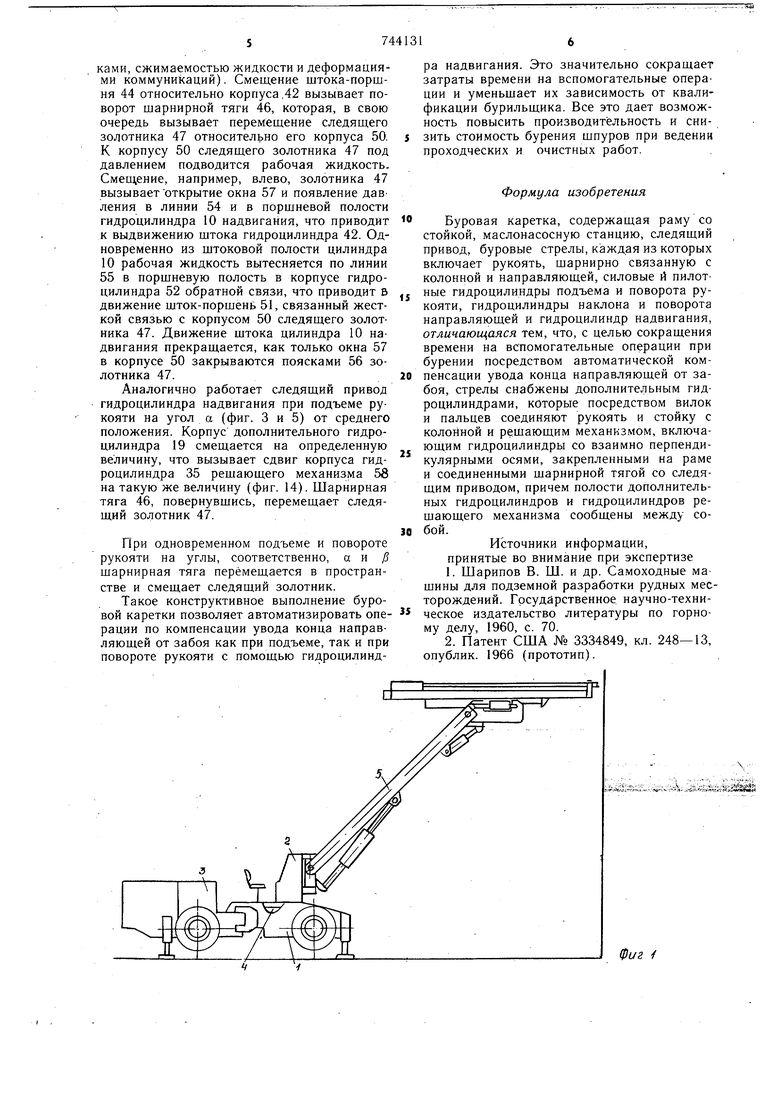
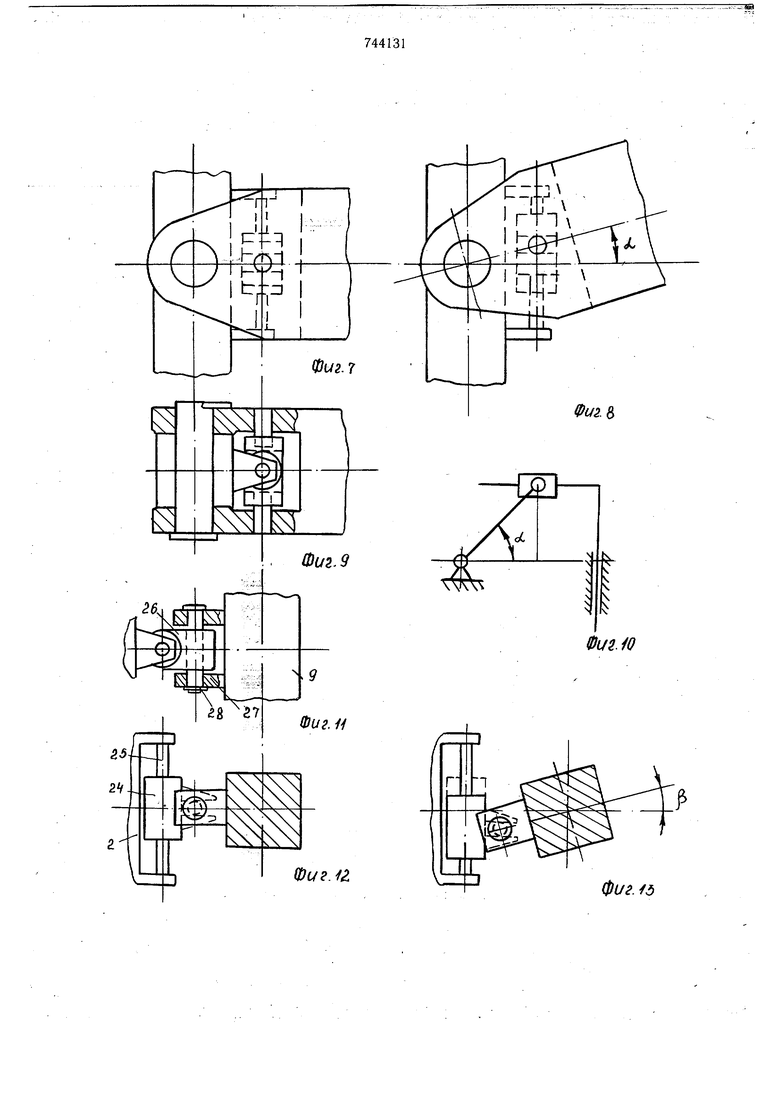
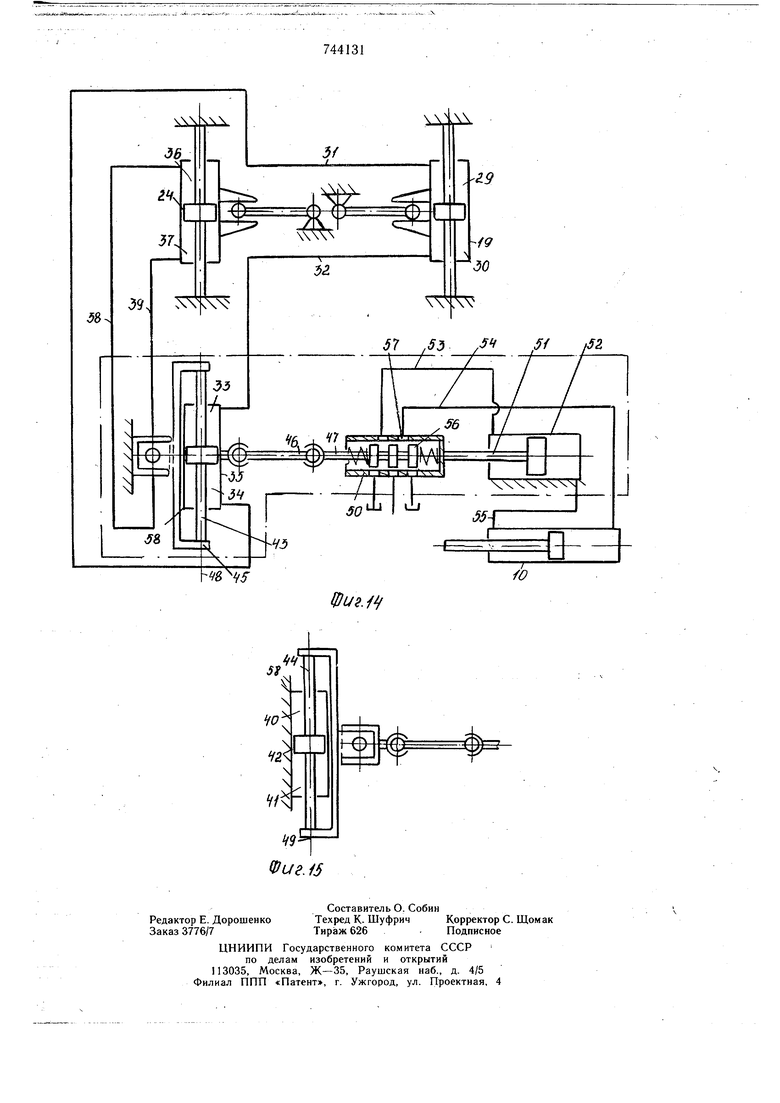
20 На фиг. 1 схематически изображе- . на буровая каретка, вид сбоку; на фиг. 2 - буровая стрела, вид сбоку; на фиг. 3 - то же, вид сверху; на фиг. 4 - кулисный синусный гидравлический меха374низм подъема рукояти, вид сбоку при гори зонтальном положении рукояти; на фиг. 5 - то же, вид сбоку при подъеме рукояти на угол а, - в вертикальной плоско ти; на фиг. 6 - то же, вид сверху; на фиг. 7, 8 и 9 - другой вариант кулисного синусного гидравлического механизма подъема рукояти; на фиг. 10 - принципиальная кинематическая схема кулисного синусного гидравлического механизма; на фиг. 11 - кулисный синусный гидравлический механизм поворота рукояти, вид сбоку; на фиг. 12 - то же, вид сверху; на фиг. 13 - то же, при повороте рукояти на угол ; на фиг. 14 - принципиальная схема решающего пространственного гидравлического механизма, вид сверху; на фиг. 15 - то же, вид сбоку. Буровая каретка (фиг. 1) содержит раму 1 со стойкой 2, маслонасосную станцию 3, следящий привод 4 на раме, буровые стрелы 5, каждая из которых включает рукоять 6. . Рукоять 6 (фиг. 2) щарнирно связана одним концом через вращатель 7 с направляющей 8, а другим с поворотной колонной 9. Направляющая 8 выдвигается относительно рукояти 6 посредством гидроцилиндра 10 надвигания. Поворот направляющей 8 относительно рукояти 6 осуществляется с помощью гидроцилиндра I1 поворота направляющей, а наклон направляющей 8 производится с помощью гидроцилиндра 12 наклона. Рукоять 6 может наклоняться в вертикальной плоскости на угол а с помощью силового гидроцилиндра 13 подъема рукояти и вместе с колонной 9 рукоять 6 может поворачиваться на угол в горизонтальной плоскости с помощью гидроцилиндра 14 по ворота рукояти (фиг. 3). Установленные между направляющей 8 и рукоятью 6 гидродилиндры 11 и 12 связаны гидравлически с пилотными гидроцилиндрами поворота 15 рукояти и подъема 16 рукояти, которые обеспечивают сохранение перпендикулярности направляющей 8 к забою при повороте и наклоне рукояти 6. Между рукоятью 6 и колонной 9 размещен синусный гидравлический кулисный механизм 17 подъема рукояти, а между колонной 9 и стойкой 2 расположен синусный гидравлический кулисный механизм 18 поворота рукояти. Синусный кулисный механизм 17 подъема рукояти, размещенный внутри рукояти 6 .(фиг. 4, 5 и 6), содержит дополнительный гидроцилиндр 19, щток-поршень 20 которого закреплен на рукояти б, а корпус гидроцилиндра 19 с вилкой 21 может быть подвижен, причем ось вилки перпендикулярна оси гидроцилиндра. Рычаг 22 неподвижен относительно колонны 9 и посредством пальца 23 взаимодействует с вилкой 21. Синусный кулисный механизм 18 поворота рукояти 6, расположенный между колонной 9 и стойкой 2 (фиг. 11, 12 и 13), содержит дополнительный гидроцилиндр 24, щток-порщень 25 которого закреплен на стойке 2, а корпус гидроцилиндра 24 с вилкой 26 может быть подвижен. Рычаг 27 неподвижен относительно колонны 9 и посредством пальца 28 взаимодействует с вилкой 26. Полости 29 и 30 корпуса дополнительного гидроцилиндра 19 синусного кулисного механизма 17 подъема рукояти связаны гидрокоммуникациями 31 и 32 с полостями 33 и 34 в корпусе гидроцилиндра 35 (фиг. 14), Полости 36 и 37 корпуса дополнительного гидроцилиндра 24 синусного кулисного механизма 18 поворота рукояти соединены гидрокоммуникациями 38 и 39 с полостями 40 и 41 в корпусе гидроцилиндра 42. (С целью упрощения изображения принципиальной гидросхемы, система компенсации утечек и закачки рабочей жидкости в коммуникации 31, 32, 38 и 39 не показана). Порщни-штоки 43, 44 гидроцилиндров 35 и 42 связаны между собой кронщтейном 45. Корпус гидроцилиндра 42 неподвижно соединен с рамой, а корпус гидроцилиндра 35 может перемещаться. Корпус гидроцилиндра 35 с помощью щарнирной тяги 46 соединен со щтоком следящего золотника 47. Ось следящего золотника 47 перпендикулярна двум параллельным плоскостям, проходящим через оси 48 и 49 порщней-щтоков 43 и 44 и, при углах пи/ равным нулю (фиг. 4 и 12), совпадает с осью тяги 46 при условии, когда буровая каретка ориентирована относительно забоя таким образом, что передняя плоскость стойки параллельна плоскости забоя. Корпус 50 следящего золотника 47 соединен со щтоком-поршнем 51 гидроцилиндра 52 обратной связи. Кроме того, корпус 50 следящего золотника 47, корпус гидроцилиндра 52 обратной связи соединены гидрокоммуникациями 53, 54 и 55 с гидроцилиндром 10 надвигания. Следящий золотник 47 выполнен с поясками 56, а корпус 50 с окнами 57. Решающий механизм 58, включающий гидроцилиндры 35 и 42, составляет со следящим золотником 47 и гидроцилиндром 52 обратной связи один блок, который может быть размещен в любом месте на буровой каретке. Устройство работает следующим образом. При повороте рукояти вместе с колонной 9 на угол от среднего положения (фиг. 3 и 13), рычаг 27 через палец 28 сдвигает корпус дополнительного гидроцилиндра 24 относительно штока-поршня 25. Так как полости 40 и 41 корпуса гидроцилиндра 42 решающего механизма 58 связан гидравлическими коммуникациями 38 и 39 с полостями 36 и 37 корпуса дополнительного гидроцилиндра 24, то щток-поршень 44 также смещается на определенную величину (при условии равенства площадей в корпусах гидроцилиндров 24 и 42, если пренебречь утечками, сжимаемостью жидкости и деформациями коммуникаций). Смещение щтока-поршня 44 относительно корпуса .42 вызывает поворот щарнирной тяги 46, которая, в свою очередь вызывает перемещение следящего золотника 47 относительно его корпуса 50. К корпусу 50 следящего золотника 47 под давлением подводится рабочая жидкость. Смещение, например, влево, золотника 47 вызываетоткрытие окна 57 и появление дав ления в линии 54 и в порщневой полости гидроцилиндра 10 надвигания, что приводит к выдвижению щтока гидроцилиндра 42. Одновременно из щтоковой полости цилиндра 10 рабочая жидкость вытесняется по линии 55 в порщневую полость в корпусе гидроцилиндра 52 обратной связи, что приводит Б движение щток-порщенВ 51, связанный жесткой связью с корпусом 50 следящего золотника 47. Движение штока цилиндра 10 надвигания прекращается, как только окна 57 в корпусе 50 закрываются поясками 56 золотника 47. Аналогично работает следящий привод гидроцилиидра надвигания при подъеме рукояти на угол а (фиг. 3 и 5) от среднего положения. Корпус дополнительного гидроцилиндра 19 смещается на определенную величину, что вызывает сдвиг корпуса гидроцилиндра 35 решающего механизма 58 на такую же величину (фиг. 14). Шарнирная тяга 46, повернувшись, перемещает следящий золотник 47. При одновременном подъеме и повороте рукояти на углы, соответственно, а и шарнирная тяга перемещается в пространстве и смещает следящий золотник. Такое конструктивное выполнение буровой каретки позволяет автоматизировать операции по компенсации увода конца направляющей от забоя как при подъеме, так и при повороте рукояти с помощью гидроцилиндра надвигания. Это значительно сокращает затраты времени на вспомогательные операции и уменьщает их зависимость от квалификации бурильщика. Все это дает возможность повысить производительность и снизить стоимость бурения щпуров при ведении проходческих и очистных работ. Формула изобретения Буровая каретка, содержащая раму со стойкой, маслонасосную станцию, следящий привод, буровые стрелы, каждая из которых включает рукоять, щарнирно связанную с колонной и направляющей, силовые и пилотные гидроцилиндры подъема и поворота рукояти, гидроцилиндры наклона и поворота направляющей и гидроцилиндр надвигания, отличающаяся тем, что, с целью сокращения времени на вспомогательные операции при бурении посредством автоматической компенсации увода конца направляющей от забоя, стрелы снабжены дополнительным гидроцилиндрами, которые посредством вилок и пальцев соединяют рукоять и стойку с колойной и рещающим механизмом, включающим гидроцилиндры со взаимно перпендикулярными осями, закрепленными на раме и соединенными шарнирной тягой со следящим приводом, причем полости дополнительных гидроцилиндров и гидроцилиндров решающего механизма сообщены между собой. Источники информации, принятые во внимание при экспертизе 1.Шарипов В. Ш. и др. Самоходные ма шины для подземной разработки рудных месторождений. Государственное научно-техническое издательство литературы по горному делу, 1960, с. 70. 2.Патент США № 3334849, кл. 248-13, опублик. 1966 (прототип).
. f
фиг /
Фи2. iO
Фи./
