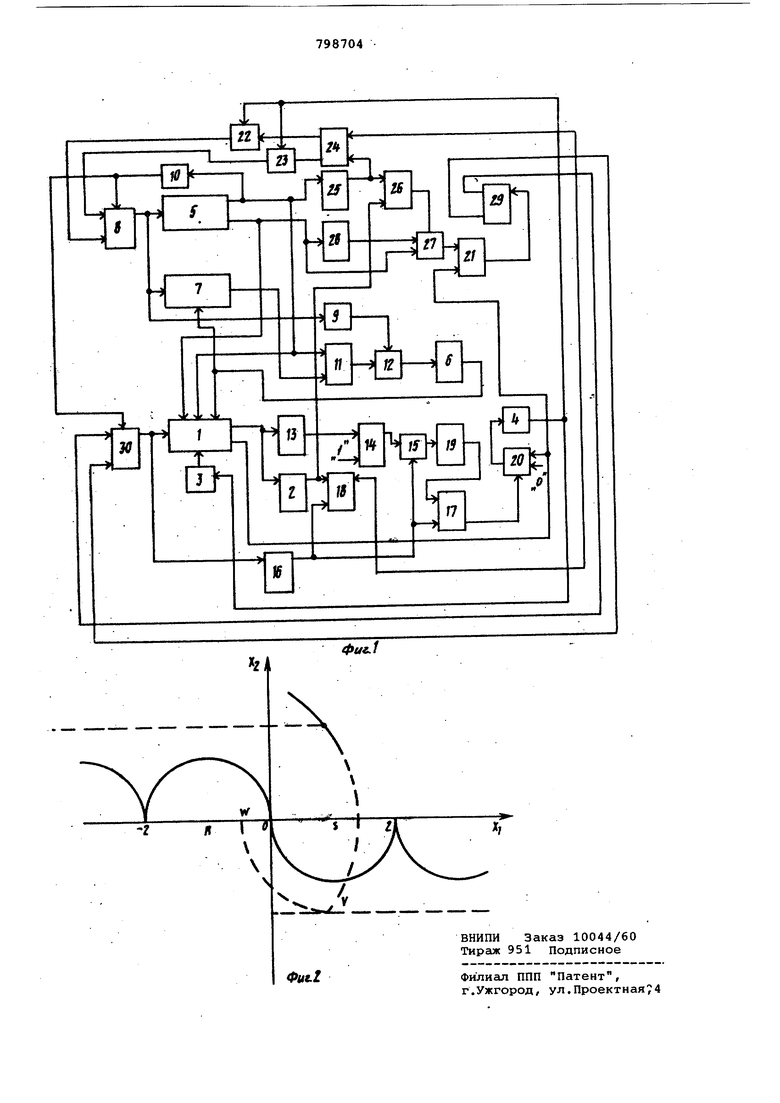
(54) СИСТЕМА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ОБЪЕКТАМИ ВТОРОГО ПОРЯДКА диненные второй функциональный преобразователь, второй блок сравнения соединен с первым входом первого ключа, второй вход которого подключен к выходу третьего блока сравнения, первым входам первого и второго блоков эквивёшентность, а выход - соединен со входом блока памяти, выход которого подключен ко второму входу первого блока эквивалентности, соединенного выходом с первым входом второго ключа, втор вход которого подключен ко второму выходу первой модели, входу второго сумматора, на третий вход подается произвольный ненулевой сигнал, а вы ход подключен ко входу нуль-органа, соединенного своим выходом с первым входами третьего и четвертого ключе соединенных своими вторыми в.ходс1ми первым и вторым выходами третьего блока эквивалентность, один вход которого через второй блок эквивале ность подключен к выходу первого бл ка сравнения, а второй вход через четвертый блок сравнения подключен к первому выходу объекта и входу четвертого блока эквивалентность, второй вход которого соединен с выходом первого блока сравнения, а вы ход - с первым входом пятого ключа, подключенного вторым входом через инвертор ко кторому выходу объекта, а выходом. - ко второму входу второг сумматора, выход которого соединен со входом пятого блока сравнения, подключенного выходами ко входу третьего триггера, выход которого соединен с пятым выходом первой модели и входом третьего блока срав нения, а установочный вход третьего триггера соединен с установочным входом первого триггера,подключенного своими входами к выходгш треть го и четвертого ключей. На фиг. 1 представлена блок-схем системы оптимального управления объ TaKNiK второго порядка, а на фиг. 2 переходной процесс. Система оптимального управления объектс1Ми второго порядка содержит первую модель 1, первый выход которой соединен со входом первого блока 2 сравнения, а первый вход. - с блоком управления первой моделью 3 Подключенной входом к выходу нульоргана 4, второй и третий входы с первым и вторым входами объекта 5 соответственно, четвертый вход с выходом интегратора б и первым вх дом второй модели 7, второй вход ко торой подключен к выходу первого триггера 8, входу первого функционгшьного преобразователя 9 и входу объекта 5, первый выход которого подключен через блок 10 начальных ycTaBOK iK и установочному входу пер вого триггера 8, а также ко входу первого сумматора 11, второй вхол которого соединен с выходом второй модели 7, а выход подключен ко входу блока умножения 12, второй вход которого соединен с выходом первого функционального преобразователя 9, а выход - со входом интегратора б, при этом первый выход первой модели 1 через второй функциональный преобразователь 13, второй блок 14 сравнения соединен с первым входом первого ключа 15, второй вход которого подключен к выходу третьего блока 16 сравнения, входом первого 17 и второго 18 блоков эквивалентность, а выход соединен со входом блока памяти 19, выход которого подключен ко второму входу первого блока 17 эквивалентность, соединенного выходом со входом второго ключа 20, второй вход которого подключен ко второму выходу первой модели 1, входу второго сумматора 21, на третий вход подается произвольный ненулевой сигнал, а выход подключен ко входу нуль-органа 4, соединенного своими выходами со входами третьего 22 и четвертого 23 ключей, соединенных своими вторыми входами с первым и вторым выходами третьего блока 24 эквивалентность, один вход которого через второй блок 18 эквивалентность подключен к выходу первого блока 2 сравнения, а второй вход через четвертый блок 25 сравнения подключен к первому выходу объекта 5 и входу четвертого блока 26 эквивалентность, второй вход которого соединен с выходом первого блока 2 сравнения, а выход - с первым входом пятого ключа 27, подключенного вторым входом через инвертор 28 ко второму выходу объекта 5, а выходом - ко второму входу второго сумматора 21, выход которого соединен со входом пятого блока 29 сравнения, подключенного выходами ко входам третьего триггера 3, выход которого соединен с пятым входом первой модели 1 и входом третьего блока 16 сравнения, а установочный вход соединен с установочным входом первого триггера 8, подключенного своими входами к выходам третьего 22 и четвертого 23 ключей. На фиг. 2 представлен оптимальный по быстродействию переходной процесс, где приняты следующие обозначения: координаты объекта, х(), х(л)) координаты модели, Задачей оптимальной по быстродействию систекы управления колебательными объектами является формирование последовательности оптимальных управлений вида +и,д, -и„о,х. или + тся., . где максимальноезначение управляющих воздействий кгНс функции фазовых координат объекта управления x(i), ). При этом система реализует нелинейный закон управления, определенный на
фазовой плоскости управлением линии переключения.
Поскольку кусочно-нелинейная аппроксимация функции переключения сопржена со значительными погрешностями, то для реализации закона управления может быть использована модель,многократно и в быстром времени реализующая уравнения движения объекта. При этом управляющее воздействие, подавае|Мое на объект, выбирается, исходя из свойств траектории модели в окрестноети нуля
-Sign Ujj, Sign Х Sign nx (1
и
оБ
где . x - текущее значение координаты объекта x(t), .U - значение координаты модели
.
(1)) и ее управляющего воз
действия в момент х(л)) О/ в случае, когда последняя перемена знака управляющего воздействия, подаваемого на модедь произошла в интервале 0 lx(V)| 2.
Управлякмцёе воздействие, подаваемое на модель, работающее в ускоренном масштабе времени определяется
и - (V)-X2Sign х(Л)К2)25 где х,х - текущее координаты
объекта; X (л)) , Х2 (л))-текущее координаты
модели.
Когда параметры объекта неизвестны, IQ то непосредственное построение линии переключения невозможно и для реализации оптимального по быстродействию алгоритма управления необходимо идентифицировать объект.«е
Система работает следующим образом.
Изменение параметров объекта 5 приводит к появлению на его выходе отклонения регулируемой переменной 40 x(t). По знаку х (t) блок 10 начальных уставок производит набор значения управления на первом шаге движения объекта 5, что обеспечивается установкой триггера 8. При этом триг- 45 гер 30 переводится в то же состояние, что в тригере 8, На вход объекта 5, второй модели 7, функционального преобразователя 9 подается управление Sign X (t), что вызывает измене-JQ ние выходных сигнгшов объекта 5 и модели 7. Выходные сигналы объекта 5 и модели 7 поступают на входы сумматора формирования сигнала рассогласования i(t), вызванного измеяе-, -.нием параметров объекта -5. Сигнал g, (t) с выхода сумматора 11 подается на один из входов блока 12 умножения, на другой вход которого поступает выходной сигнал функционального преобразователя 9, структура которого 60 определяется по методу вспомогательного оператора. Выходной сигнал блока 12 умножения, определяющий скорость изменения переменного параметра объекта 5, посредством интегратора 6 прда- 45
ется на выходы первой и второй моделей 1 и 7.
При этом на блок 26 эквивалентность подаются сигналы с блоков 2 и 16 сравнения,соответствующие Sign X,(l fl t/u, - масштаб, времени и S i gn х, В зависимости от сигнала 1 или О на выходе блока 26 эквивалентность через ключ 27 на вход сумматора 21 поступает х или хд, на другой вход
которого поступает значение () . В зависимости от знака выходного сиг:нала сумматора 21 посредством блока 29 сравнения и триггера 30 реализуетЪя закон управления (2) моделью 1.
изменение переменных объектов 5x(t) и Xj,(t) поступают как начальные условия в модель 4, которая в быстром времени реализует уравнения движения объекта.
До момента попадания | х (-У)/ ( абсолютная величи1 а х (л) образуется вследствие прохождения величины х (-0) через функциональный преобразо ватель 13 в зону, соответствующую 2, на выходе блока 14 сравнения появляется 1, в результате чего через ключ 15 с блока 16 сравнения проходит сигнал 1 или Ю, соответствующий Sign Uyi, , который запоминается в блоке 19 памяти и подается на вход блока 17 эквивалентность. Поскольку на его второй вход подается тот же самый сигнаш, то на инверсном выходе блока 17 эквивалентность появляется О. В результате чего через ключ 20 проходит ненулевой произвольный сигнал, на выходе нуль-органа 4 вырабатывается нулевой сигнал, модель 1 продолжает оставаться в режиме решение, ключи 22 и 23 закрыты, триггер 8 остается в прежнем состоянии, т.е. управление, подаваемое на объект остается прежним. В случае попадания /х(л)) в зону, соответствующую 2, при наличии в ней переключения управляющего воздействия U на инверсном выходе блока 17 эквивалентность появляется 1, в результате чего через ключ 20 на вход нуль-органа 4 посту;; пает сигнал ). Если О, то нуль-орган вырабатывает сигнал, поступающий на вход блока управления моделью, ключи 22 и 23 открываются для прохождения сигналов с блока 24 сравнения, на выходе которого реализуется соотношение (1). В результате чего триггер 8 устанавливается в состояние, соответствующее соотношению (1).- В то же время сигнал, поступающий с нуль-органа 4 на блок 3 управления моделью, вызывает изменение режима работы модели 1, перевода ее в режим задания начашьных условий. После этого весь режим работы систекы повторяется.
Движение объекта 5 при подобном управлении происходит по траектории
обеспечивающей минимальную деятельность процесса управления.
Результаты исс едований, проделанных на макете предлагаемой системы оптимального управления, показали что по сравнению с указанным аналогом удалось повысить точность реализции процесса управления на 50%, а быстродействие на 30%.
Формула изобретения
Система оптимального управления объектами второго порядка, содержащая первую модель, первый выход которой соединен со входом первого блока сравнения, а первый вход - с блоком управления первой моделью, подключенной входом к выходу нуль-органа, второй и третий входы модели - с первым и вторым выходами объекта соответственно, четвертый вход - с выходом интегратора и первым входом второй модели, второй вход которого подключен к выходу пер.вого триггера, входу первого функционального преобразователя и входу объекта, первый выход которого подключен через блок начальных уставок к установочному входу первого триггера, а также ко входу первого сумматора, второй вход которого соединен с выходом второй модели, а выход подключен ко входу блока умножения, второй вход которого соединен с выходом первого функционального преобразователя, а выход - со входом интегратора, отличающаяся тем, что, с целью повышения точности и быстродействия сисTeNbi, она содержит второй сумматор, триггеры, ключи, блоки сравнения, блоки эквивалентности, функциональные преобразователи, инвертор и блок памяти, первый выход первой модели через последовательно соединенные втрой функционсшьный преобразователь, второй блок сравнения соединен с первым входом первого ключа, второй вход которого подключен к выходу
третьего блока сравнения, первым входам первого и второго блоков эквивалентность, а выход соединен со входом блока памяти, выход которого подключен ко второму входу первого блока эквивалентность, соединенного выходом с первым входом второго ключа, второй вход которого подключен ко второму выводу первой модели, входу второго сумматора, а выход подключен ко входу нуль-органа, соединенного своим выходом с первыми входами третьего и четвертого ключей, соединенных своими вторыми входами спервым и вторым выходами третьего блока эквивалентность, один вход которого через второй блок эквивалентность подключен к выходу первого блока сравнения, а второй вход через четвертый блок сравнения подключен к первому выходу объекта и входу четвертого блока эквивалентность, второй вход которого соединен с выходом первого блока сравнения, а выход - с первым входом пятого ключа,, подключенного вторым входом через инвертор ко второму выходу объекта, а выходом - ко второму входу второго сумматора, выход которого соединен со входом пятого блока сравнения, подключенного выходами ко входу третьего триггера, выход которого соединен с пятым входом первой модели и входом третьего блока сравнения, а установочный вход третьего триггера соединен с установочным входом первого триггера, подключенного к своими входами к выходу третьего и четвертого ключей.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР
по заявке № 2405048/24,кл. G05 В 13/02 17.09.76.
2.Авторское свидетельство СССР по заявке №2456037/24,кл. G05 В 13/02, 01.01.77 (прототип).


| название | год | авторы | номер документа |
|---|---|---|---|
| Система оптимального управления с моделью объектами второго порядка | 1980 |
|
SU888071A1 |
| Система оптимального управленияОб'ЕКТАМи ВТОРОгО пОРядКА | 1979 |
|
SU813359A1 |
| Система оптимального управления колебательными объектами произвольного порядка | 1983 |
|
SU1092467A1 |
| Система оптимального управления объектами второго порядка | 1981 |
|
SU954934A2 |
| Устройство для оптимального управления колебательными объектами второго порядка | 1973 |
|
SU499553A1 |
| Система оптимального управления объектами второго порядка | 1980 |
|
SU920634A2 |
| Система оптимального управления объектом второго порядка | 1977 |
|
SU651308A1 |
| Система терминального управления упругим объектом | 1987 |
|
SU1434403A1 |
| Устройство для измерения темпера-ТуРы | 1979 |
|
SU851117A1 |
| Устройство для отображения векторных диаграмм на экране электронно-лучевой трубки | 1988 |
|
SU1541663A1 |

г.Ужгород, ул.Проектная 4
