(5) СИСТЕМА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ОБЪЕКТАМИ ВТОРОГО ПОРЯДКА
| название | год | авторы | номер документа |
|---|---|---|---|
| Система оптимального управления с моделью объектами второго порядка | 1980 |
|
SU888071A1 |
| Система оптимального управления колебательными объектами произвольного порядка | 1983 |
|
SU1092467A1 |
| Система оптимального управленияОб'ЕКТАМи ВТОРОгО пОРядКА | 1979 |
|
SU805250A1 |
| Система оптимального управления объектом второго порядка | 1977 |
|
SU651308A1 |
| Система оптимального управленияОб'ЕКТАМи ВТОРОгО пОРядКА | 1979 |
|
SU798704A1 |
| Система оптимального управления объектами второго порядка | 1976 |
|
SU643833A1 |
| Система оптимального управления объектами второго порядка | 1976 |
|
SU648946A1 |
| Устройство для оптимального управления колебательными объектами второго порядка | 1973 |
|
SU499553A1 |
| Система оптимального управления объектами второго порядка | 1980 |
|
SU920634A2 |
| Система оптимального управленияОб'ЕКТАМи ВТОРОгО пОРядКА | 1979 |
|
SU813359A1 |
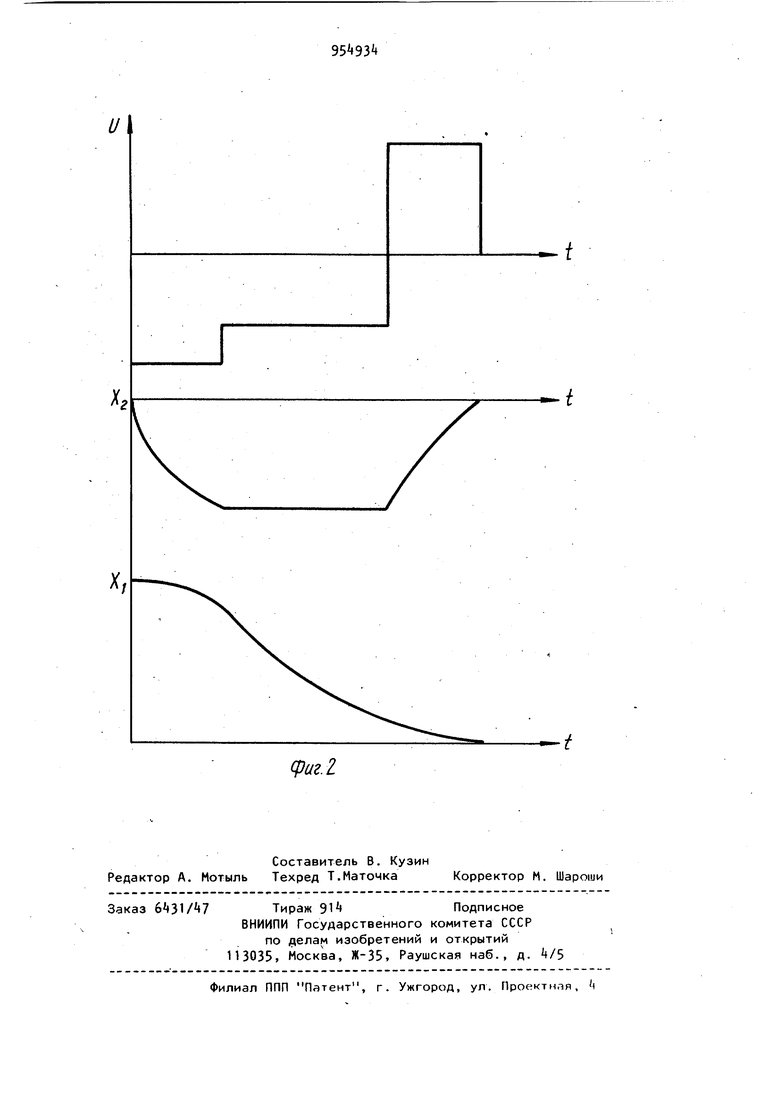
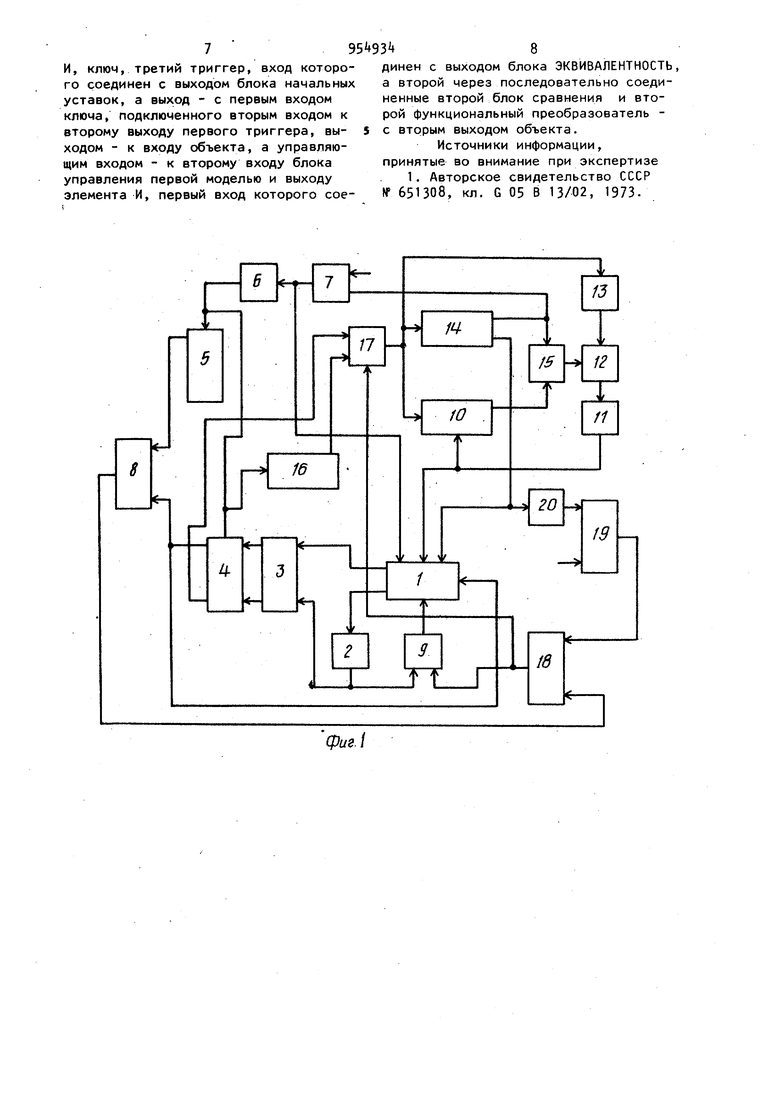
Изобретение относится к системам автоматического управления, предназначено для оптимального по быстродействию управления неколебательным динамическими объектами второго порядка с переменными параметрами, ограничением производной регулируемой величины и может быть использовано для управления летательными аппрата ми, электроприводами и химико-технологическими процессами. По основному авт. св. № 651308 известна система оптимального управления объектами второго порядка, содержащая первую модель, выходы которой соединены с входом нуль-органа и первым входом первого блока сравнения подключенного выходами к соответствующим входам первого триггера, третий вход которого соединен с первым входом второго триггера и через блок начальных уставок, с выходом первого сумматора, а первый выход - с входом блока ЭКВИВАЛЕНТНОСТЬ, подключенного вторым входом к выходу второго три1- гера, и первым входом первой модели, второй вход которой соединен через блок управления первой моделью с выходом нуль-органа и вторым входом первого блока сравнения, третий входс выходом первого сумматора, четвертый вход - с первым входом второй модеЛи и через интегратор, блок умно- жения, первый функциональный преобразователь с входом объекта и вторым входом второй модели, выход которой подключен к первому входу второго сумматора, соединенного выходом с вторым входом блока умножения, а вторым входом - с первым входом первого сумматора и первым выходом объекта, второй выход которого подключен к пятому входу первой модели l . Эта система обладает низкими характеристиками по точности и быстродействию, что является ее недостатком. 39 f Цель изобретения - повышение точности и быстродействия системы. Поставленная цель достигается тем, что в системе дополнительно установлены второй функциональный преоб разователь, второй блок сравнения, элемент И, ключ, третий триггер, вход которого соединен с выходом блока начальных уставок, а выход - с первым входом ключа, подключенного вторым входом к второму выходу первого триггера, выходом - к входу объекта, а управляющим входом к второму входу блока управления первой моделью и выходу элемента И, первый вход которого соединен с выходом блока. ЭКВИВАЛЕНТНОСТЬ, а второй - через последовательно соединенные второй блок срав нения и второй функциональный преобразователь к второму выходу объекта. На фиг. 1 представлена блок-схема системы оптимального управления объектами второго порядка; на фиг. 2 переходный процесс. Система оптимального управления , объектами втордго порядка содержит первую модель 1, выходы которой соеди нены с входом нуль-органа 2 и первым входом первого блока 3 сравнения, подключенного выходами к соответствующим входам первого триггера , тре тий вход которого соединен с первым входом второго триггера 5 и через блок.6 начальных уставок с выходами первого сумматора 7, а первый выходс входом блока ЭКВИВАЛЕНТНОСТЬ 8, подключенного вторым входом к выходу второго триггера 5, и первым входом первой модели 1, второй вход которой соединен через блок управления первой моделью 9 с выходом нуль-органа 2 и вторым входом первого блока сравнения 3, третий вход -- с выходом первого сумматора 7, четвертый вход - с первым входом второй модели 10 и чере интегратор 11, блок 12 умножения, пер вый функциональный преобразователь 13 с входом объекта 1 j и вторым входо второй модели 10, выход которой подключен к первому входу второго сумматора 15, соединенного выходом с вторым входом блока 12 умножения, а вторым входом - с первым входом первого сумматора 7 и первым выходом объ екта 1, второй выход которого-подключен к пятому входу первой модели 1, при этом вход третьего триггера 4 1б соединен с выходом блока начальных уставок 6, а выход - с первым входом ключа 17, подключенного вторым входом к второму выходу первого триггера k, выходом - к входу объекта 1, а управляющим входом к второму входу блока управления первой моделью 9 и выходу элемента И 18, первый вход которого соединен с выходом блока ЭКВИВАЯЕНТНОСТЬ Ь, а второй через последовательно соединенные второй блок 19 сравнения, второй функциональный преобразователь 20 к второму выходу объекта 14. Переходной процесс в системе представлен на фиг.. 2, где приняты следующие обозначения: Ср (t) - задающее воздействие; X(t), XjCt) - фазовые координаты объекта, u(t) - управляющее воздействие. Задачей оптимальной по быстродействию системы управления объектами второго порядка с ограничением является формирование последовательности оптимальных управлений вида +ифах. +U4CT, -Umax или . +Uniax где UfYidx. - максимальное значение управляющих воздействий как функ ции фазовых координат объекта управления X(t), ), UycT - управляющее воздействие, обеспечивающее стабилизацию координаты Xj на значении 2 Х допПри этом система реализует нелинейный закон управления, определенный двумя функциями переключения. Первая из которых управляет выводом ограниченной координаты на допустимое значение и переключает ее на стабилизацию, .а после стабилизации снова управляет ограниченной координатой, вторая дает моменты начала управления ограниченной координатой. Поскольку кусочно-линейная или ку сочно-нелинейная аппроксимация функций переключения сопряжена со значительными погрешностями, то для реализации закона управления может быть использована модель многократно и в быстром времени реализующая уравнения движения объекта.. Когда параметры объекта неизвестны, то непосредственное построение линий переключения невозможно и для реализации оптимального по быстродействию алгоритма управления необходимо идентифицировать объект. 5ч Система работает следующим обра 1 Изменение значений задающего воздействия Ср (t), поступающего на вход сумматора 7 или изменение параметров объекта 1 приводит к появлению на его выходе отклонения регулируемой переменной X(t), По знаку X(t) блок 6 начальных уставок производит выбор значения управления на начальном участке движения объекта 14, что обеспечивается начальной установкой триггера k. При этом триггеры 16, 5 переводятся в то же состояние, что и триг гер , а блок ЭКВИВАЛЕНТНОСТЬ 8 выдает сигнал 1 на вход элемента И 18, на второй вход которого поступает нулевой сигнал с блока 19 сравнения, поскольку величина jX2(t)l (абсолютная величина X2{t) образуется вследствие прохождения величины .(t.) через функциональный преобразователь 20) не достигло своего ограничения, В результате, на вход управления первой моделью 1 поступает сигнал 0 и модель 1 находится в режиме задания начальных условий. При этом выдается сигнал управления UQ -Sing X(t) с триггера k через ключ 17 на входы объекта 14, второй модели 10 и функционального преобразователя 13, что вызывает изменение выходных сигналов объекта 14 и модели 10; Выходные сигналы объекта 14 и модели 10 поступают на входы сумматора 15 для формирования сигнала рассогласования (t), вызванного изменением параметров объекта 14. Сигнал {t) с выхода сумматора 15 подается на одни из входов блока 11 умножения, на другой вход которого поступает выходной сигнал функционального преобразователя 1 3;,структура которого определяется по методу вспомогательного оператора. Выходной сигнал блока 11 умножения, определяющий скорость изменения переменного параметра объекта 14, посредством интегратора 11 подается на входы первой и второй моделей 1, 10. Как только X2(t) достигает Х2Аоп, что определяет начало участка стабили зации, на выходе элемента И 20 появляется 1 и первая модель 1 переводится в режим периодического решения. При этом на ее вход подается упргвляющий сигнал ид -UorC триггера 4, а на вход объекта 14, модели 10, функ ционального преобразователя 13 управляющий сигнал UtjcT с триггера 1б. Изменения переменных объекта I X(t) и X(t) поступают как назльные условия в модель 1. Как только координата модели 1 ) , где -Р i/M, м 1 - масштаб времени,-образуемая в процессе решения моделью 1 уравнений движения объекта Т, принимает нулевое, решение, нуль-орган 2 вырабатывает сигнал, поступающий на входы блока 9 управления моделью и блока 3 сравнения. При этом блок 3 сравнения определяет знак переменной X., поступающий на его другой вход, и возбуждает в зависимости от значения Sing Х(9) один из входов триггера k. И поскольку до достижения изображающей точкой объекта Il линии переключения знак переменной X(S) не меняется, то на объект по-прежнему подается управляющее воздействие UycT В то же время сигнал, поступающий с нуль-органа 2 на блок управления моделью 1, вызывает изменение режима работы модели 1, переводя ее в режим задания начальных условий. После этого весь режим работы системы повторяется до тех пор, пока при возбуждении нуль-органа 2 блок сравнения 3 не определит изменения знака переменной Xyjiv) при Х2() О (процесс настройки заканчивается до этого момента). Это свидетельствует о прохождении траектории отображающей точки модели 1 через начало координат системы. При этом триггер 4 изменяет свое состояние и поскольку состояния триггеров 4 и 5 в этом случае не совпадают, то блок эквивалентность останавливает решение на модели 1, на выходе элемента И 18 сигнал О и, следовател но, на вход объекта подается сигнал с выхода триггера 4. Движение объекта 14 при подобном управлении происходит по траектории, обеспечивающей минимальную длительность про- цесса управления, что обеспечивает повышение точности и быстродействия системы соответственно на 20% и 30%. Формула изобретения Система оптимального управления объектами второго порядка по авт. св. ff 651308, от ли чающаяся тем, что, с целью повышения точности и быстродействия системы, она содержит второй функциональный преобразователь, второй блок сравнения, элемент
И, ключ, третий триггер, вход которого соединен с выходом блока начальных уставок, а выход - с первым входом ключа, подключенного вторым входом к второму выходу первого триггера, выходом - к входу объекта, а управляющим входом - к второму входу блока управления первой моделью и выходу элемента И, первый вход которого соединен с выходом блока ЭКВИВАЛЕНТНОСТЬ, а второй через последовательно соединенные второй блок сравнения и второй функциональный преобразователь с вторым выходом объекта.
Источники информации, принятые во внимание при экспертизе
1, Авторское свидетельство СССР № 651308, кл. G 05 В 13/02, 1973(риг. 2
