(54) УСТРОЙСТВО ДЛЯ ОДНОВРЕМЕННОЙ ОБРАБОТКИ ДЕТАЛЕЙ С ДВУХ
1 Изобретение относится к станкостроению и, в частности, к устройствам для одновременной обработки деталей с двух сторон. По основному, авт. св. I 564927 известны устройства для одновременной обработки деталей с двух сторон которые выполнены в виде двух, веду щей и ведомой, многошпиндельных коробок с инструментами, связанных между собой рейками - тягами и перемещающихся по общим направляющим Механизм изменения направления подачи ведомой шпиндельной коробки выполнен в виДе блока шестерен, уст новленного в корпусе ведущей шпинде но коробки, взаимодействующего одной шестерней с рейкой-тягой, а дру гой - с дополнительной рейкой, выполненной на непЬдвижных направляю щих, причем обе рейки расположены по одну сторону от блока шестерен Диаметр шестерни блока, взаимодействующей с рейкой-тягой, равен ( 1) «а, где d - диаметр шестерни, взаимодействующей с рейкой, выпол СТОРОН ненной на неподвижной направляющей г - подача ведомой шпиндельной коробки; S. - подача ведущей шпиндельной коробки. Описанное устройство позволяет обрабатывать детали с двух сторон одновременно, но только если обработка ведется не до выхода.одного отверстия в другое. В тех случаях, когда необходимо обрабатывать отверстия в тонких деталях, например сверлить на проход и снимать фаску, или снимать .фаску с обеих сторон отверстия в тонкой детали, или сверлить с обеих сторон отверстия с выходом одного в другое и т. п. случаях, известное устройство для обработки деталей с двух сторон применить невозможно/ так как в конце рабочего хода режущие инструменты столкнутся. Целью изобретения является расширение технологических возможностей .устройства, т. е. осуществление обработки соосных отверстий в тонких деталях или отверстий, выходящих одно в другое.
Эта цель достигается тем, что
механизм изменения направления по- . дачи ведомой шпиндельной коробки в . известном устройстве снабжен шариками с., подшипником качения, соединяющими шестерни блока механизма, и
)айй Ьграниченкя перемещения йедомой ршиндельной коробки,установленЙВГйй; на Неподвижных направляющих и pefliiax-Trtrax,, причем расстояние между ведомой шпиндельной кЬробкой
и одним из упоров выполнено равным соотношению -.
d
t.
L
D
TMe.d - диаметрШестерни, взаимо. действующей с рейкой на направляющих;
D - диаметр расположения шариков; С - длина дуги на-диаметре рас полЪжения шарикоб, необходимая для выкатывания шариков из лунок на гладкий торец, равная половине диаметра лунки.
Такое конструктивное выполнение блсэка Мёханизма изменения направления подачи ведомой шпиндельной коробки в сочетании с упорами на направляющих и рейках-тягах позволяет в необходимый момент остановить ведомую шпиндельную коробку, ртвести ее назад, давая возможность ведущей шпиндельной коробке закончить обработку с выходом ее инструмента в отверстие, обработанное с помощью ведомой шпиндельной коробки, и вернуть все элементы устройства в исходное положение.
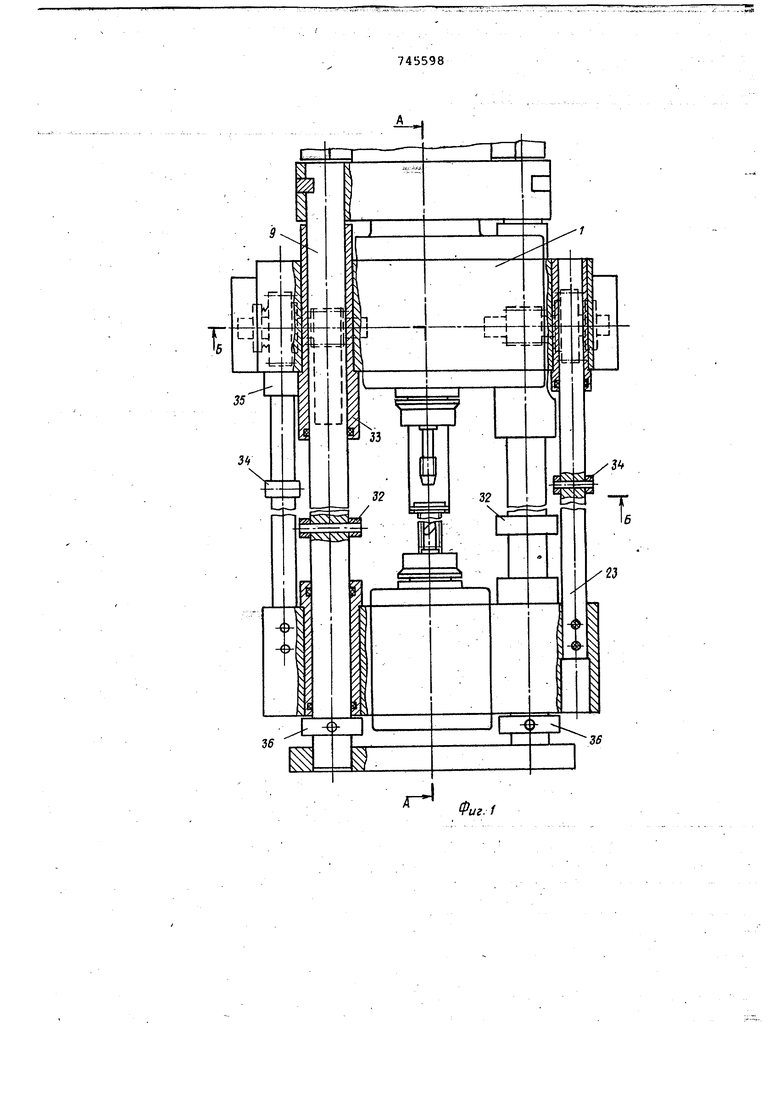
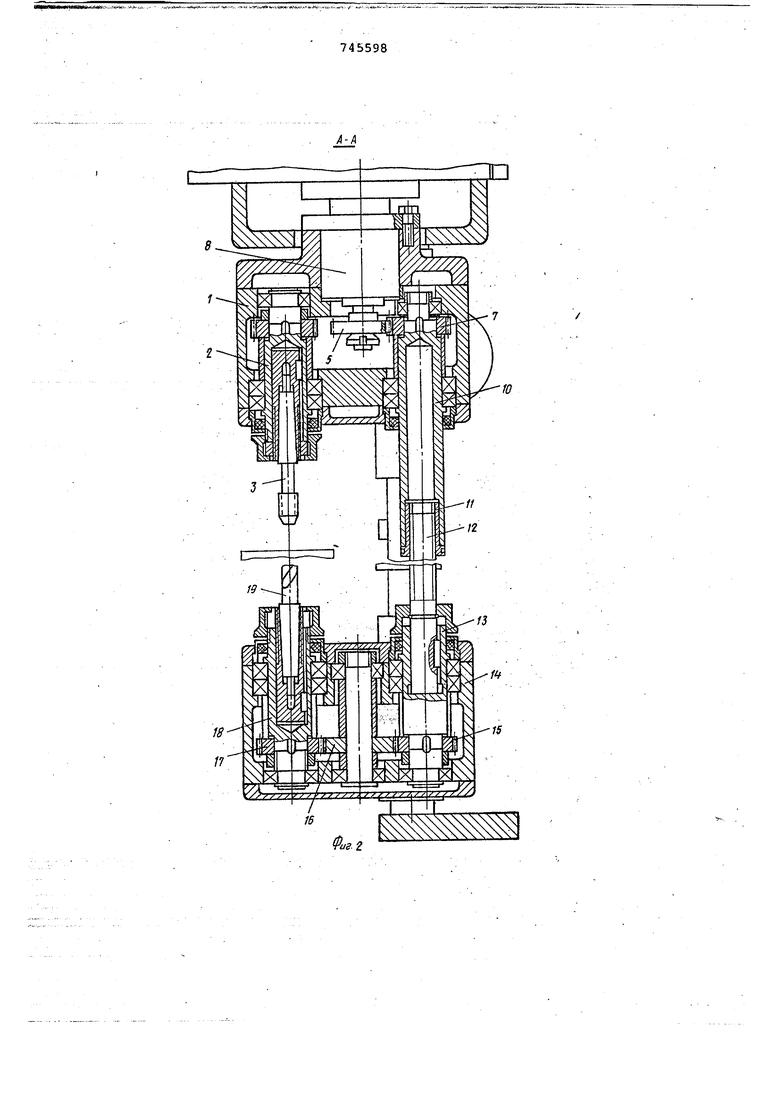
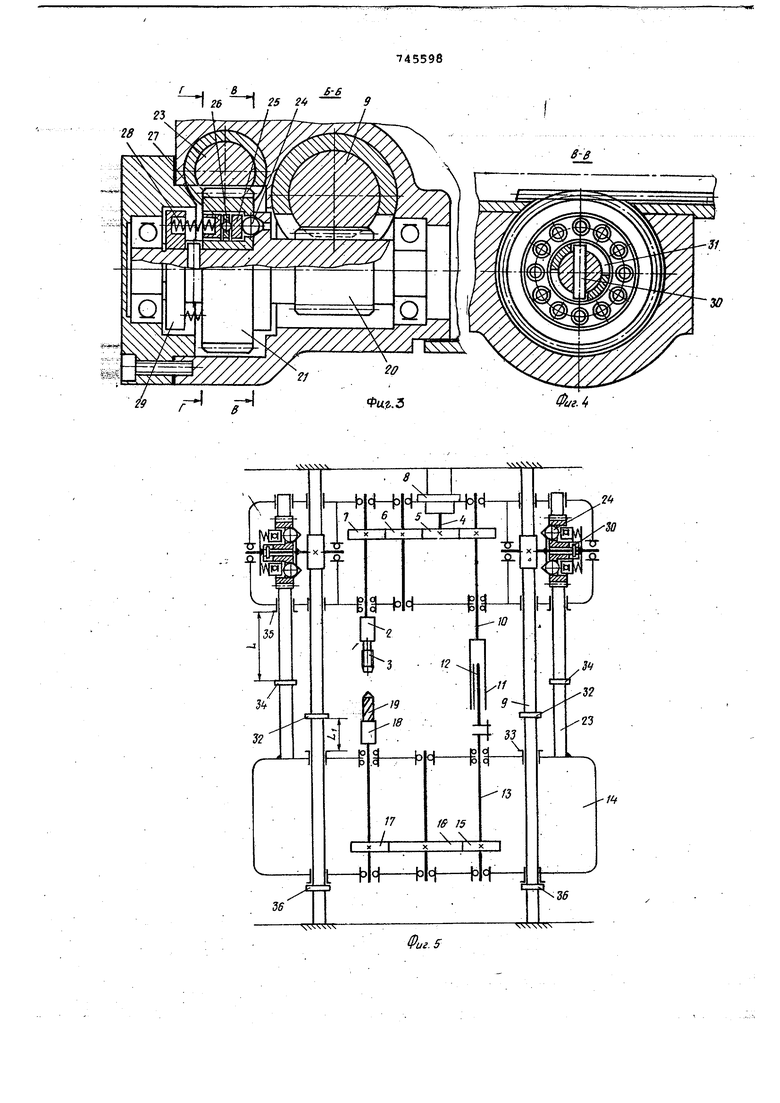
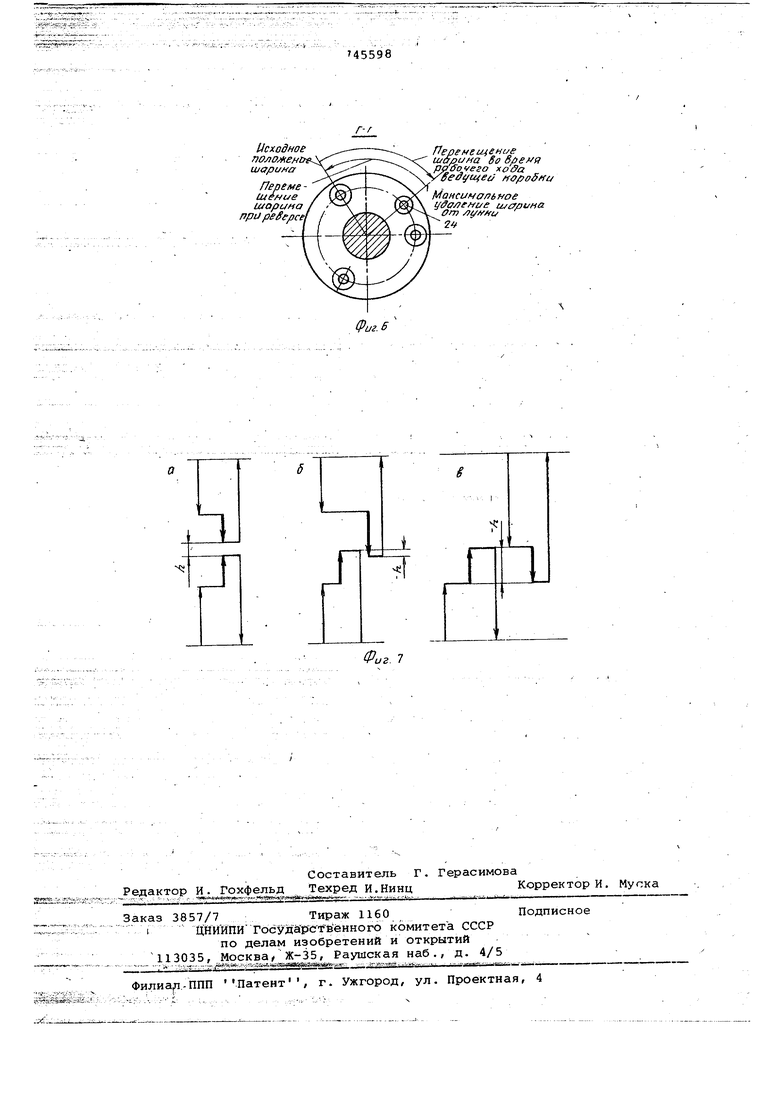
На фиг. 1 дан вид предлагаемого устройства спереди; на фиг. 2 - сечение А-А,по кинематической цепи главного движения; на.фиг. 3 - сечение по механизму изменения направления подачи ведомой шпиндельной коробки; на фиг. 4 - сечение В-В по ограничений углового смещения шестерен блока; на фиг. 5 кинематическая схема устройства; на фиг. 6 - сечение Г-Г по шарикам; на фиг. 7 - циклограммы работы устройства (на циклограммах тонкими линиями обозначены холостые перемещения, толстыми - рабочие перемещения) .
Устройство для одновременной обработки с двух сторон содержит ведущую шпиндельную коробку 1, в которой установлены шпиндели 2 с ежущим инструментом 3, ведущим обработку с одной стороны детали и получающим движение от шпинделя 4 силовой евetiJiiSiiEitidiO стОка через шестерни .5, 6, 7. Ведьлшая шпинельная коробка Г за фёплёна на пиноли 8 силовой головки или сверлильного станка с возможностью перемещёнйя при ее движении по неподвижным направляющим 9.
Один из шпинделей ведущей шпиндельной коробки 1, например шпиндель 10, снабжен шлицевой втулкой 11, сопряжейной со шлицевым валом 12, остановленным в шпинделе 13 ведойой шпиндельной коробки 14. Ведомая шпиндельная коробка 14 перемещается по тем же направляющим 9, что и ведущая шпиндельная коробка 1, но в Противоположную сторону. На шпинделе 13 установлена шестерня 15 для передачи главного движения через шестерни 16 и 17 шпинделям 18 с ре- жущим инструментом 19, ведущим обработку летали с противоположной стороны. . .
В корпусе ведущей шпиндельной коробки 1 расположен механизм измене ния направления подачи режущего инструмента 19 ведомой шпиндельной коробки 14, содержащий блок шестерен 20, 21. Шестерня 20 зацепляется с рейкой 22, выполненной на неподвижных направляющих 9 шпиндельных коробрк 1 и 14, а шестерня 21 - с рейкойтягой 23, соединённой с корпусом ведомой шпиндельной коробки 14. При этом обе рейки. 22 и 23 расположены по одну сторону блока шестерен 20, 21. Шестерни 20 и 21 соединены в блок шариками 24, ра.сположенными в лунках контактирующих тб5)цов упомя-. нутых шестерен. Шарики 24 нагружены через шайбу 25, подшипник качения 26 общий, как и шайба 26, для всех шариков 24, шайбу 27 группой пружин 28, замыкаемых на вспрмогательный фланец 29. На шестерне 20, точнее на ее удлиненной цапфе, выполнен выступ образованный ш.тифтом 30, который в паз 31 на торце шестерни 21. На неподвижных направляющих 9 установлены упоры 32, расположенные межд шпиндельными коробками И и 14. Упоры 32 служат для ограничения встречного перемещения ведомой шпиндельнойкоробки 14. С НИМИ контактируют втулки 33, являющиеся направляющими шпиндельной коробки 14 при ее перемещений по неподвижным направляющим 9. Расстояние между рабочими торцами упомянутых упоров и втулок 33 равно ходу L ведомой шпиндельной коробки 14.
На 1ёйках-тягах установлены упоры 34, контактирующие с торцами втулок 35 для отвода ведомой ЩпИндельной коробки 14 вместе с инструментами 19 от места обработки. Для отвода ведомой шпиндельной коробки 14 с максимальным усилием шарики 24 должны образовать подшипник качения, т. е. контакт упоров 34 с втулками 35должен произойти, когда ведущая шпиндельная коробка 1 пройдет IlyTb
.;
после взаимодействия втулки 33 с упорами 32. Затем ведомая шпиндельная коробка 14 без излишних усилий буде перемещаться ведущей шпиндельной ко робкой 1 в том же направлении;. Кроме того, на неподвижных напра ляющих 9 за ведомой шпиндельной коробкой 14 выполнены упоры 36, ограничивающие перемещение вниз, т.е. определяющие ее исходное положение Работает устройство следующим образом. Главное движение от шпинделя 4 через шестерни 5-7 передается на шпиндель 2 с режущим инструментом и.шпиндель 10 в ведущей шпиндельной коробке 1. Производится обработка детали с одной стороны. От шпинделя 10 через шлицевую втулку 11 и шлицевой вал 12 главное движение передается на шпиндель 13 в ведомой шпиндельной коробке 14, От шпинделя 13 через шестерни 17 главное движение передается на шпиндели 18 с режущими инструментами 19, производящими обработку с противоположной стороны. Количество и взаимное расположение шпинделей 2 и.18 определяется требованиями обработки. При необ ходимости использования устройства только для обработки деталей с противоположной стороны по отношению к источнику движения (силовому узлу) ведущая шпиндельная коробка инстру ментом не оснащается. Подача ведущей шпиндельной коробки осуществляется от пиноли 8. Ведомая шпинд ельная коробка получает движение подачи следуквдим Образом. При движении пиноли 8 по неподвидным направляющим 9 перемещается ведущая шпиндельная коробка 1 с уст новленными в ее корпусе блоками шес терен 20, 21. Шестерня 20 перекатывается по рейке 22 и вращается в том же направлении. Шестерня 21 блс ка соединена шариками 24 с шестерне 20 и вращается в ту же сторону, находясь в зацеплении с рейкой-тягой 23. Последняя, перемещаясь от шестерни 21, перемещает ведомую коробку 14 навстречу ведущей. Производится рабочая подача режущих инструментов 19 -. обработка детали с противоположной стороны. Величина подачи S ведущей шпиндельной коробки 1 определяется вели чиной подачи пиноли 8,. а величина подачи ведомой шпиндельной коробки 14 зависит от соотношения диаметров шестерен 20, 21 и подачи ведущей шп дельной коробки 1. Таким образом, диаметр шестерни 21 равен (-:-)- где d - диаметр шестерни, взаимодей ствующей с рейкой на направляющих; . 8д- подача ведомой шпиндельной коробки; подача ведущей;шпиндельной коробки. В том случае, если рабочие хода режущих инструментов ведущей и ведомой гопиндельных коробок не соприкасаются или не перекрываются (см. фиг. 7, а) при соосной обработке отверстий, по окончании рабочего хода происходит возврат обеих коробок в исходное положение. При обратном ходе пиноли 8 ведущая шпиндельная коробка 1 отводится в исходное положение. Расположенные в .ее корпусе блоки;шестерен вращаются в противоположном направлении и осуществляетсявозврат ведомойшпиндельной;коробки 14 через рейку-тягу 23 в исходное положение. Если рабочие хода инструментов коробок соприкасаются или перекрываются (фиг. 7 б, в) при обработке соосных отверстий, работа устройства по окончании рабочего хода ведомой пшиндельной коробки 14 несколько мен яетс я. Перемещающаяся навстречу ведущей шпиндельной коробке 1 шпиндельная коробка 14 торцом втулки 33 взаимодействует с упором 32 на неподвижных направляющих 9. Система, замыкается..Возрастающее усилие на шестернях 20/ 21 блока механизма изменения направления подачи ведомой шпиндельной коробки 14 выдавливает шарики 24 из лунок одной из шестерен. Шарики 24, шайба 25.в сочетаний с торцом шестерни образуют подшипник качения. После этого торец втулки 35 в ведущей шпиндельной коробке 1 вступает в контакт с; упором 34 на рейках-тягах. 23 и без . сопротивления отводит ведомую шпиндельную коробку 14 от места обработки/ .освобождая его для работы шпинделей 2 с режущими инсгтрументами 3 ведущей,шпиндельнЪй коробки 1. Шестерни 20 и 21 вращаются в это время в противопол.ожные стороны. Штифт 30 перемещается в пазу 32 к его противоположной стороне. При этом расстряние между соседними лунками по дуге ойружности на радиусе расположения шариков более величины максимально допустимого для данного случая .перекрытия рабочих ходов. В том случае, если на ведомую шпиндельную коробку 14 в этот момент воздействуют силы, стремящиеся сдвинуть ее в том же направлении, то противоположная стенка паза 31 вступит в контакт , со штифтом 30 и шарики 24 не попадут в соседнюю лунку. Между порами 34 и буртом втулки 35 обг. разуется зазор. Если в этом положении
продолжается движение .ведущё й шпиндельной коробки 1, то штифт 30, воздействуя на стенку паза 31 до окончания рабочего хода, будет пёре 1мещать ведомую шпиндельную коробку 14 навстречу-ведущей . Передача движе- ,. нйяподачи такая же, как при соединении шестерён 20 и 21 шариками 24.
Йрй : Шёрсе, т. е. при возврате устройства в исходное положение (гПавное движение может не реверсироваться) , шпиндельная коробка, 1.„ , идет назад. Шестерня 20 вращается В противоположном направлении, штифт 30 по пазу 31 возвращается в исходное положение.1.111арики 24, перекатываясь по. гладкому торцу, западают
в пёрвбнаЧальные лунки и далее обе-,:, шпиндельные коробки возвращаются в
исходное положение, как уже описывалось выше.
, вГтом случае, если нашпиндельную коробку 14 продолжают дейстйВваГЬ ПЪСТОронние силы, на1Г1ример мас а, много большая сил сопротйвления ггрй вертикальной или наклонной крмг1о;новке устройства, то шпиндельная короШа 14 буЯёт перемещаться от центра сближения к исходному псэложению. паза 31 будет в контакте со °шт5йфт6м
30 . В тККЬМйблойсении движение продВлжЖётся, пока шпиндельная коробка l4 не дойдёт до упора 36, который определяет ее исходное пЬложение в этом случае. В противйом случае шарики 24 не западут в лунки, и шпиндельная коробка 14 пройдёт- далее
HCJcu дно го положения, что приведет к разладке механизма. После контакта с .упором 36 шпиндельная коробк 1Д
бстанавливается в исходном поло жении.. Шестерня 20 вращается от- носительно неподвижной шестерни 21, ПШа шпиндельная коробка 1 не займет исйедНо№ ;псэл эт время шарики 24 . в свбилункй. Устройство готово к следующему цикЛУ- - . , , : , ...
Штифты 30 и e этом случае предох раняют от возможного попадания, шариков 24 не в свои лунки.
С помощью усовершенствования значительно расширяются технологические возможности предлагаемого устройства и станка в целом. Устройство становится универсальнымJ а пер.естановка упоров 32. и 35 обеспечивает прбстую переналадку при изменении перекрытия рабочих ходов шпиндельных коробок.
. Формула изобретения Устройство для одновременной об1)аботки деталей с двух сторон по авт. св. № 564927, о т л и ч а ющ с тёй7что с целью расширения технологических возможностей устройства, механизм изменения направления подачи ведомой шпиндельной коробки снабжё1з шариками с подшипником качения, соединяющими шестерни блока механизма, и упорами Ограничения перемещения ведомой шпиндельной коробки, установленныйи на нёггйДвйжшах направлйющих и рейках-тягах, причем расстояние между ведомой шпиндельной коробкой и однйй из упбрбв выполнено равным соотношению
.
ъ
D
диаметр шестерни, взаимодейе d-ствующей с рейкой на направляющих;
дааметр расположения шариD - ков;
длина дуги на диаметре расположения шариков, необхо дййая для выкатывания шариков из лунок на гладкий ,15авйая половине диаметра : лунки.
Источники информации, инятые во внимание при экспертизе
1. АвтбрскЬе свидетельство СССР 564927, кл. В. 23 В 35/00, 19.04,74. 26 i 25 2 Ш WM., H H 9 т(//х L V
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для одновременной обработки деталей с двух сторон | 1974 |
|
SU564927A1 |
| Агрегатный многошпиндельный станок для обработки отверстий | 1979 |
|
SU927482A2 |
| Металлорежущий станок с устройством для автоматической смены многошпиндельных инструментальных коробок | 1985 |
|
SU1238937A1 |
| Многошпиндельная головка | 1990 |
|
SU1756028A1 |
| Шпиндельный узел для сверлильного станка | 1975 |
|
SU541587A1 |
| Токарно-центровальный полуавтомат | 1989 |
|
SU1726140A1 |
| УСТРОЙСТВО ШПИНДЕЛЬНОЕ | 2004 |
|
RU2252111C1 |
| Станок для фрезерования односторонних скосов на торцах зубьев шестерен | 1977 |
|
SU738791A1 |
| ПЛЕНГНО-ТЕХКИЧЕСШБИБ^ЧкЮТЕНА | 1972 |
|
SU327006A1 |
| Автомат для сборки резьбовых соединений | 1975 |
|
SU568530A1 |
Ucx.odHoe Г1Оло ен1 шарина
Переме Сияниешорина upegeflct
Переме имение шйгрина So paffoveso хода seayufeej /городми
MoHcunant ffoe yffaj7fH s ufffptjHa
24
-Т
