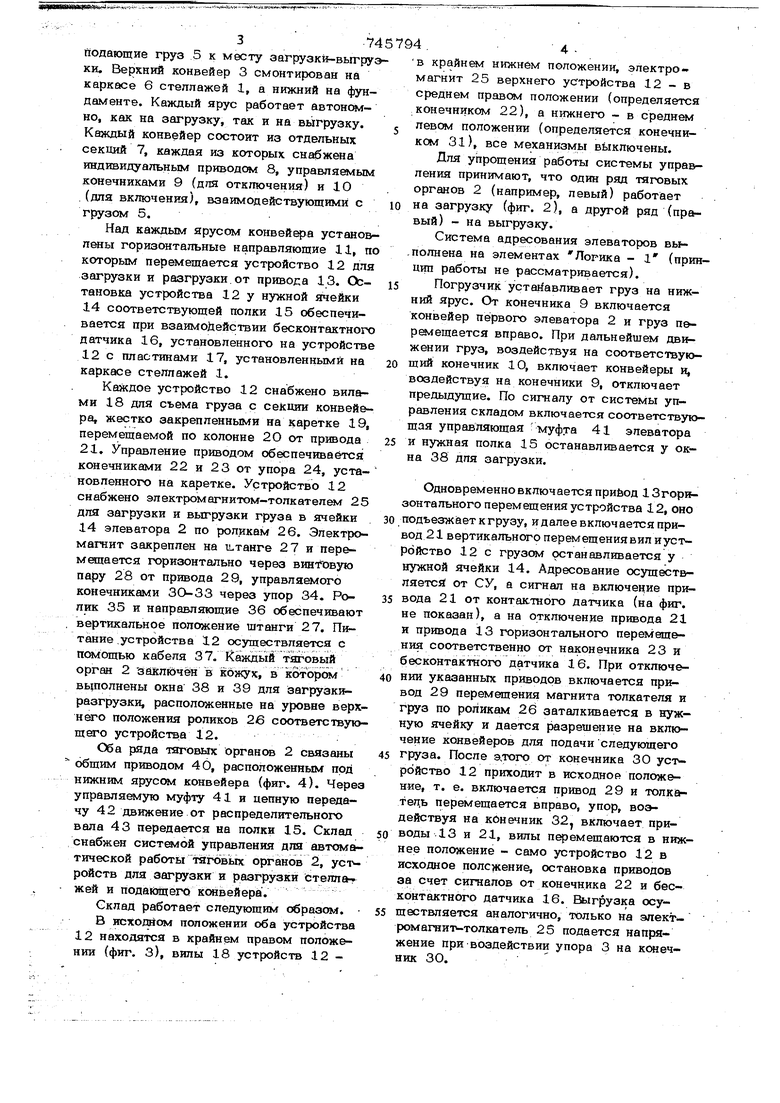
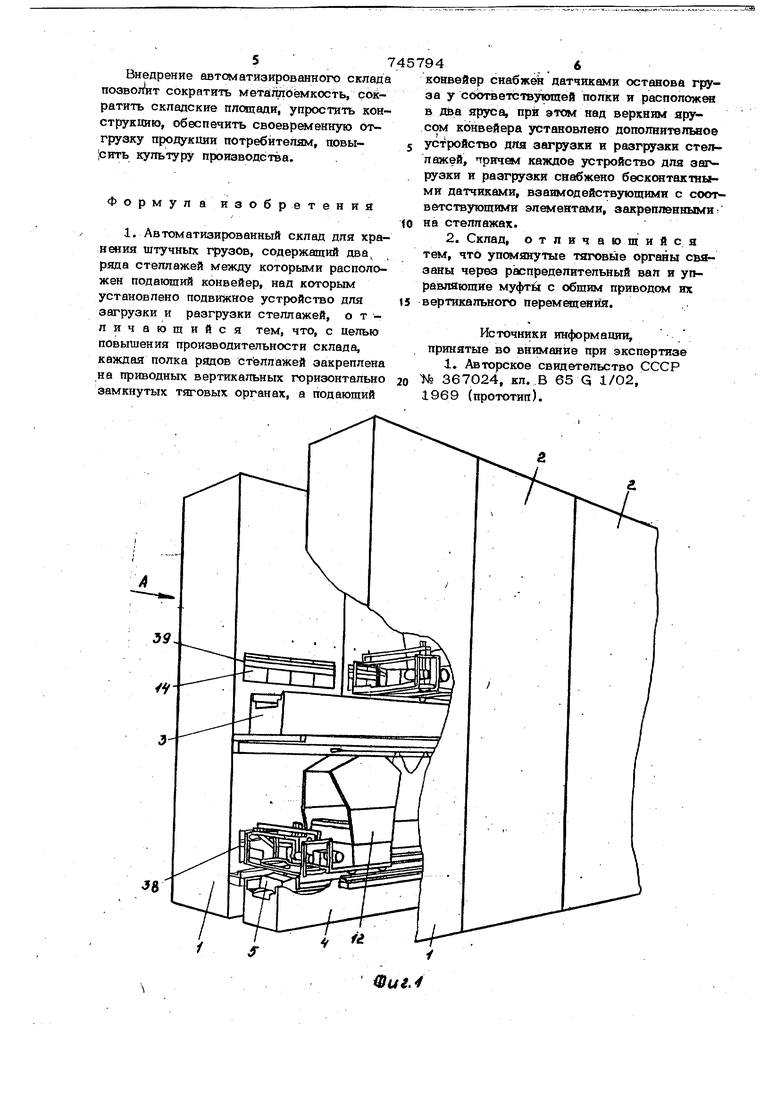
Изобретение относится к складскому хозяйству, в частности к автоматизированным складам для хранения штучных грузов. Известен автоматизированный склад для хранения штучных грузов, содержащий два ряда стеллажей между которыми расположен подающий конвейер, над которым установлено пгодвижное устройство для загрузки и разгрузки стеллажей i. Однако склад обладает низкой производительностью за счет того, что одно устройство для загрузки и разгрузки стел лажей используется как для загрузки так и для разгрузки грузов. Цель изобретения - повышение произво дительнЬсти склада. Это достигается тем, что каждая полка рядов стеллажей закреплена на приводных вертикальных горизонтально замкнутых тяговых органах, а подающий конвейер снабжен датчиками, останова груза у соот ветствующей полки и расположен в два яруса, при этом над верхним ярусом ко Гвейера установлено дополнительное устройство для загрузки и разгрузки стеллажей, причем каждое устройство для загрузки и разгрузки снабжено -.бесконтакт ными датчиками взаимодействующими с соответствующими элементами, закрепленными на стелпажах. Тяговые органы могут быть связаны через распределительный вал и управляющие муфты с общим привоаам их вертикального перемещения. На фиг. 1 представлен прёдлага0 4ый склад, общий вид: на фиг. 2 - вид А на фиг. 1: на фиг. 3 - сечение Б-Б на фиг. 2j на фиг. 4 -- изображен привод элевато(Hbix стеллажей; на фиг. 5 - вид В на фиг. 3; на фиг. 6 - вид Г на фиг. 3; на фиг. 7 - разрез Д-Д на фиг. 6; на фиг. 8разрез Б-Е на фиг. 3} на фиг. 9 - разрез Ж-Ж на фиг. 2; на фиг. 10 - ввд И на фиг. 4. Между Тишумя рядами полочных стеллажей1, снабженных, тяговыми органами 2, смонтированы два яруса подающего конвейера верхний 3 и нижний 4,
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм ориентации устройства для загрузки и разгрузки стеллажа | 1985 |
|
SU1324959A1 |
| Склад для хранения штучных грузов | 1981 |
|
SU1030264A1 |
| Устройство для хранения штучных грузов | 1990 |
|
SU1779654A1 |
| Устройство для поштучной выдачи грузов с гравитационного стеллажа | 1987 |
|
SU1472375A1 |
| Грузоподъемная площадка крана-штабелера | 1980 |
|
SU981126A1 |
| Устройство для поштучной выдачи грузов с гравитационного стеллажа | 1986 |
|
SU1404420A1 |
| Механизированный склад-накопитель штучных грузов | 1988 |
|
SU1648852A1 |
| МЕХАНИЗИРОВАННЫЙ СКЛАД | 1989 |
|
RU2033377C1 |
| Склад для штучных грузов | 1986 |
|
SU1549857A1 |
| Устройство для загрузки и разгрузки стеллажей | 1986 |
|
SU1399226A1 |
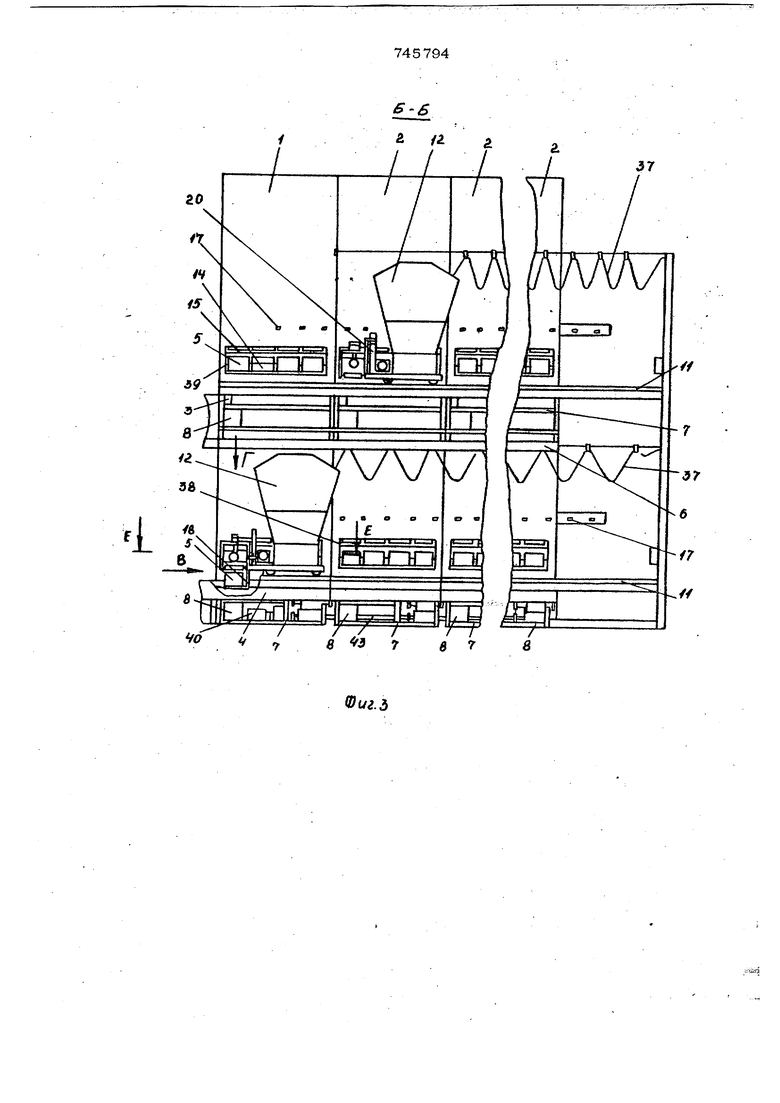
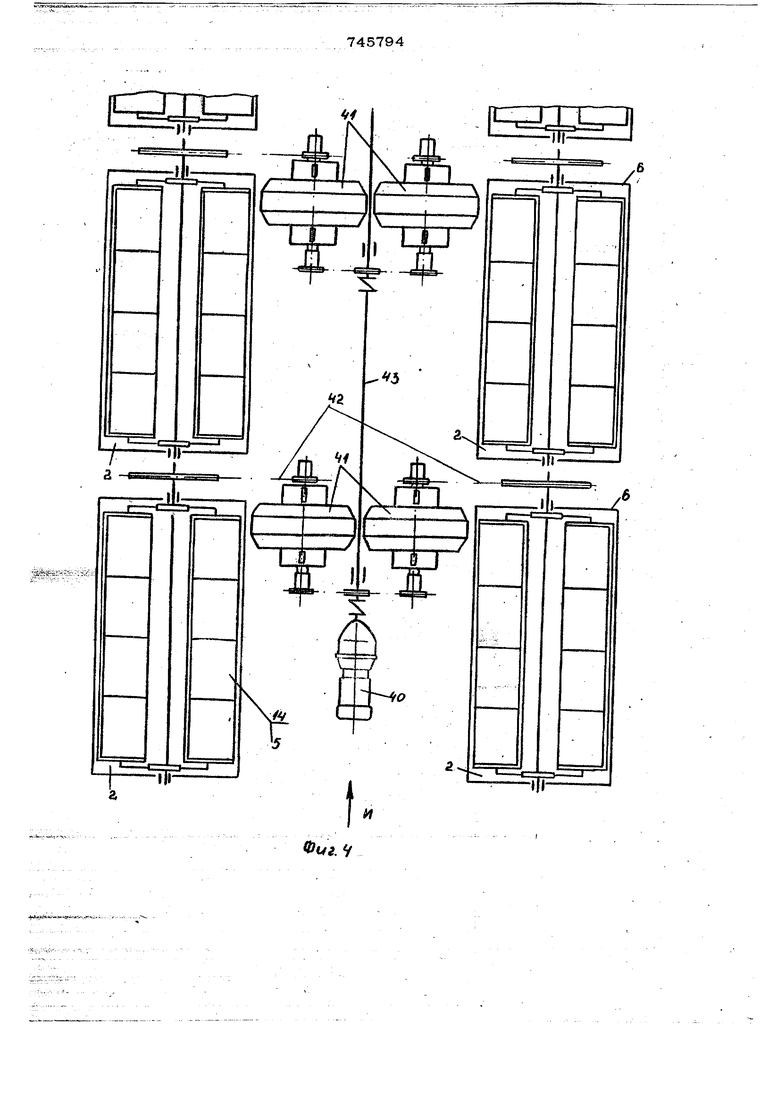
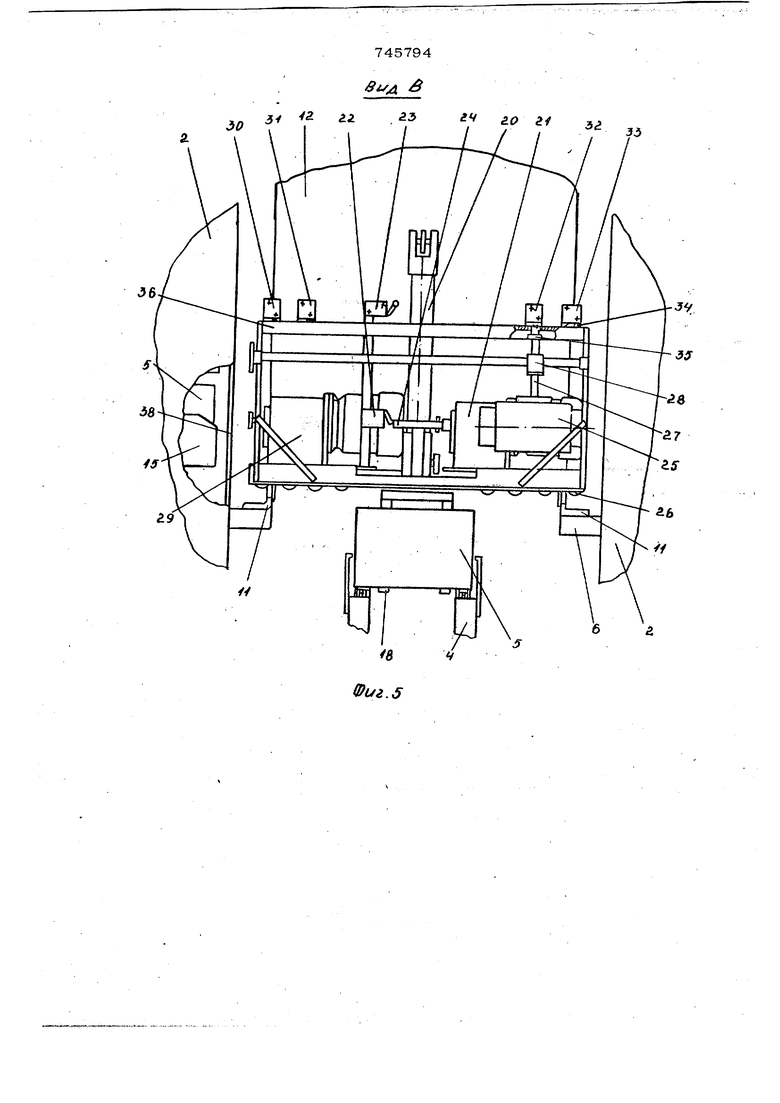
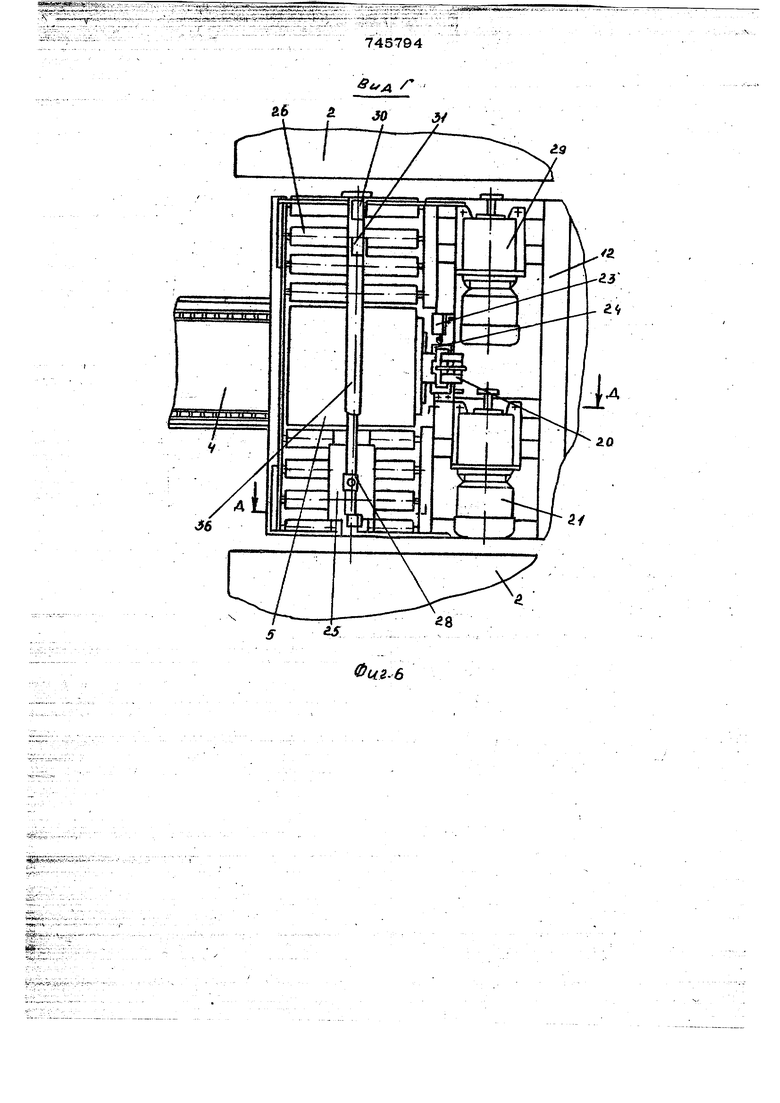
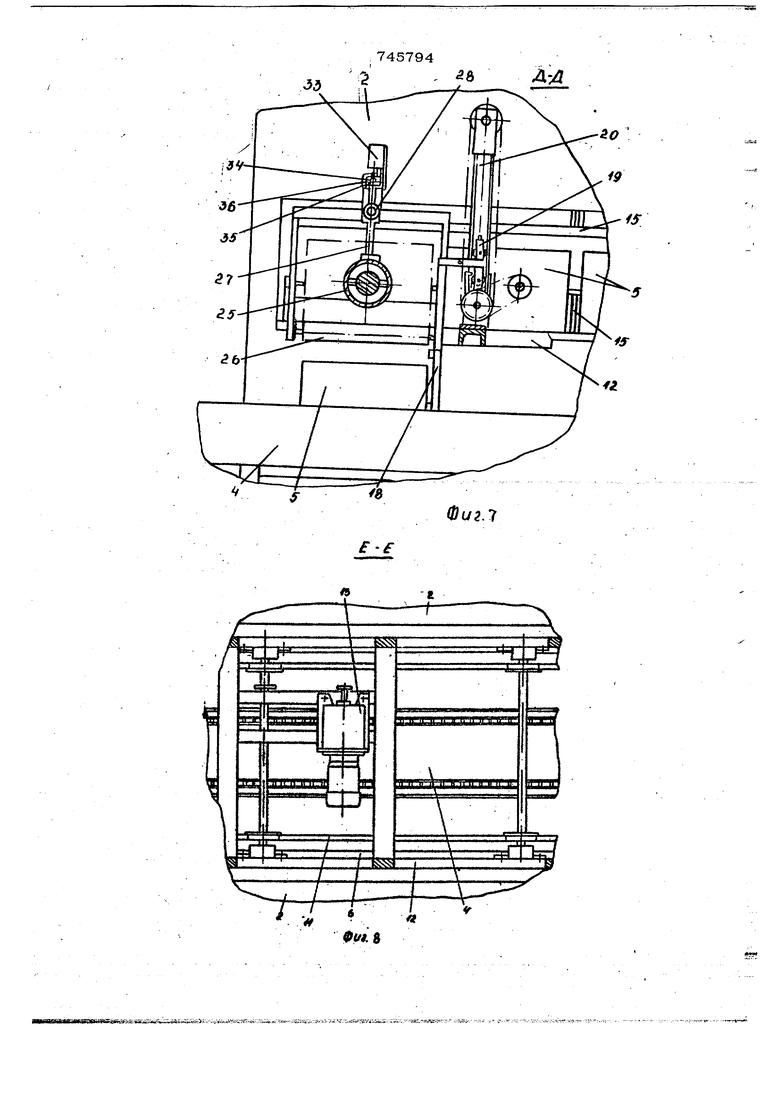
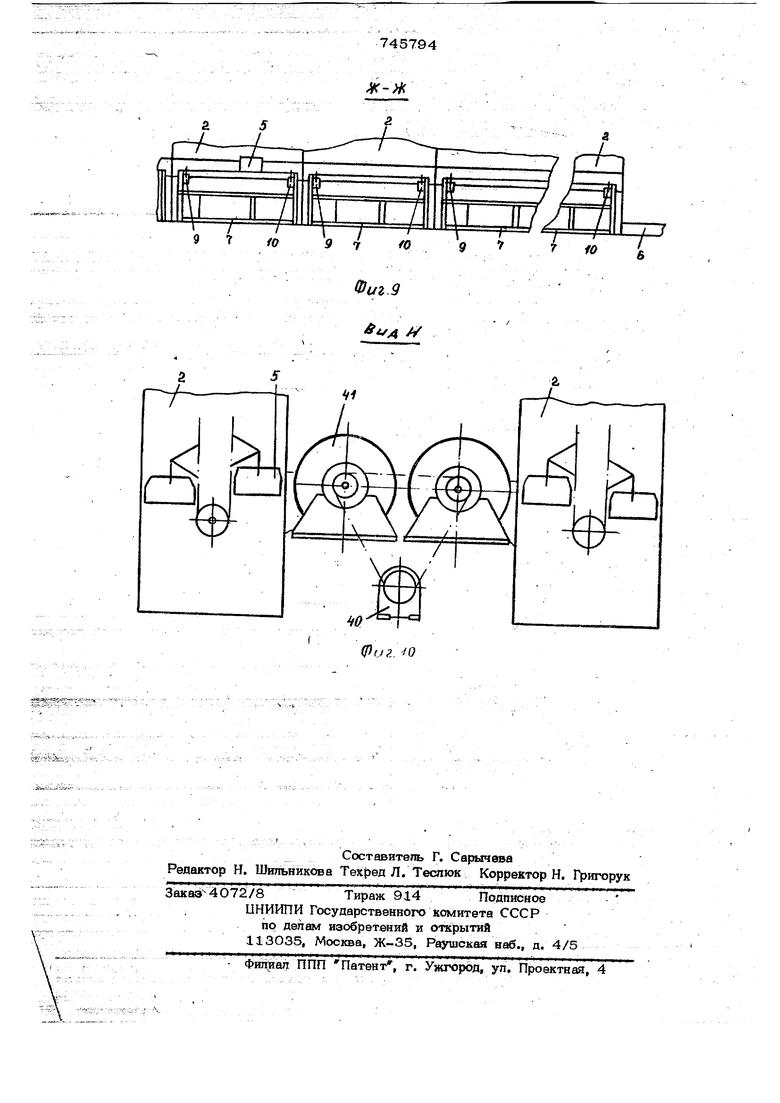
. йодающие груз 5 к месту загрузк -выгруэ ки. Верхний конвейер 3 смонтирован на каркасе 6 стеллажей 1, а нижний на фундаменте. Каждый ярус работает автонсчл- но, как на загрузку, так и на выгрузку. Каждый конвейер состоит из отдельных секций 7, каждая из которых снабжена индивидуальным приводом 8, управляи ым конечниками 9 (для отключения) и 10 . (для включения), взаимодействующими с грузом 5. Над каждым ярусом конвейера установ лены горизонтальные направляющие 11, п KOTOpbnvf перемещается устройство 12 для загрузки и разгрузки от привода 13. Остановка устройства 12 у нужной ячейки 14 соответствующей полки 15 обеспечивается при взаимодействии бесконтактного датчика 16, установленного на устройстве 12 с пластинами 17, установленными на каркозе стеллажей 1. Каждое устройство 12 снабжено вилами 18 для съема груза с секции конвейера, жестко закрепленными на каретке 19, перемещаемой по колонне 2О от привода 21. Управление приводом обеспечивается конечниками 22 и 23 от упора 24, установленного на каретке. Устройство 12 снабжено элeктpoмaгнитoм-тoлкaтeлетvf 25 для загрузки и выгрузки груза в ячейки 14 элеватора 2 по роликал 26. Электромагнит закреплен на тьтанге 27 и перемещается горизонтально через винттэвую пару 28 от привода 29, управляемого конечниками ЗО-ЗЗ через упор 34. Ролик 35 и направляющие 36 обеспечивают вертикальное положение штанги 27. Питание устройства 12 осуществляется с помощью кабеля 37. Каждый тяговый орган 2 ;3йклк чён в Мжух, в котором выполнены окна 38 и 39 для загрузки разгрузки, расположенные на уровне верх него положения роликов 26 соответствую щего устройства 12. Оба ряда тяговых органов 2 связаны общим приводом 40, расположенным под нижним яруссм конвейера (фиг. 4). Через управляемую муфту 41 и цепную передачу 42 движение от распределительного вала 43 передается на полки 15. Склад снабжен системой управления дпя автоматической работы тягч:)в1ых органов 2, уст ройств для загрузки и разгрузки Стелла-жей и подайщего конвейера. Склад работает следующим образом. В исходном положении оба устройства 12 находятся в крайнем правом положении (фиг. З), вилы 18 устройств 12 в крайнем нижнбм положении, электромагнит 25 верхнего устройства 12 - в среднем правом положении (определяется конечником 22), а нижнего - в среднем левсм положении (определяется конечником 31), все механизмы выключены. Для упрощения работы системы управления принимают, что один ряд тяговых органов 2 (например, левый) работает на загрузку (фиг. 2), а другой ряд (правый) - на выгрузку. Система адресования элеваторов выполнена на элементах Логика - 1 (принцип работы не рассматривается). Погрузчик устаиЕавливает груз на нижний Ярус. От конечника 9 включается конвейер первого элеватора 2 и груз перэлещается вправо. При дальнейшем движении груз, воздействуя на соответствующий конечник 10, включает конвейеры и, воздействуя на конечники 9, отключает предыдущие. По сигналу от системы управления складом включается соответствующая управтмющая -муфта 41 элеватора и нужная полка 15 останавливается у окна 38 для загрузки. Одновременно включается прибод 13гор онтального перемещения устройства 12, оно подъезжает к грузу, и далее включается приод 21 вертикального перемещениявил иустбйство 12 с грузом останавливается у нужной ячейки 14. Адресование осуществляется от СУ, а сигнал на включение привода 21 от контактного датчика (на фиг. не показан), а на отключение привода 21 и привода 13 горизонтального перел ещения соответственно от наконечника 23 я бесконтактного датчика 16. При отключении указанных приводов включается привод 29 перемещения магнита толкателя и груз по роликам 26 заталкивается в нужную ячей10 и дается разрешение на включение конвейеров для подачи следующего груза. После атого от конечника 30 ус-пройство 12 приходит в исходное положение, т. е. включается привод 29 и толкател.ь перемещается вправо, упор, воздействуя на конечник 32, включает приводы 13 и 21, вилы перемещаются в нижнее положение - само устройство 12 в исходное положение, остановка приводов за счет сигналов от конечника 22 и бесконтактного датчика 16. Выгрузка осуществляется аналогично, только на электромагнит-толкатель 25 подается напряжение при воздействии упора 3 на конечник ЗО.
Внедрение автоматизированного склада поаволит сократить металлбёмкость, сократить складские площади, упростить конструкцию, обеспечить своеврк енкую отгрузку продукции потребителям, цовы;сить культуру производства.
Формула изобретения
конвейер снабжен датчиками останова груза у сббтветствукяцей полки и расположен в два яруса, при этом над верхним ярусом конвейера установлено дополнительное
уст ройство дпя загрузки и разгрузки степлажей, тричем каждое устройство для загрузки и разгрузки снабжено бесконтактными датчиками, взаимодействующими с соответствующими элементами, закрепленными г
на стеллажах.
вертикального перемещения.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 367024, кл. В 65 Q 1/02, 1969 (прототип).
.г
BuA/l
13L
Фиг.д
. ви/(
-r- K f - - - лг-745794
га
5/
л55
Фиг.
//
