Изобретение относится к промышленному складированию, а именно к механизированным складам.
Цель изобретения повышение удобства эксплуатации и упрощение конструкции.
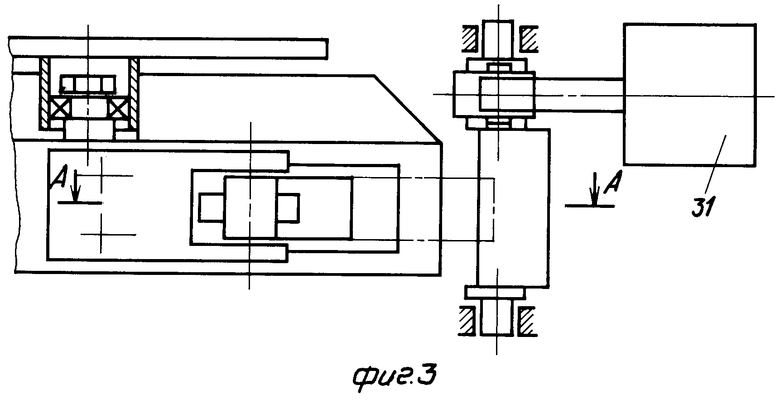
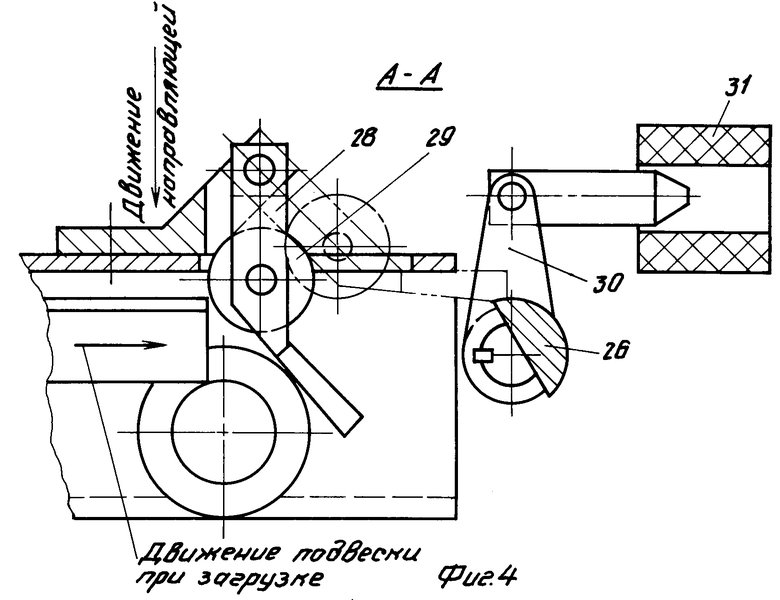
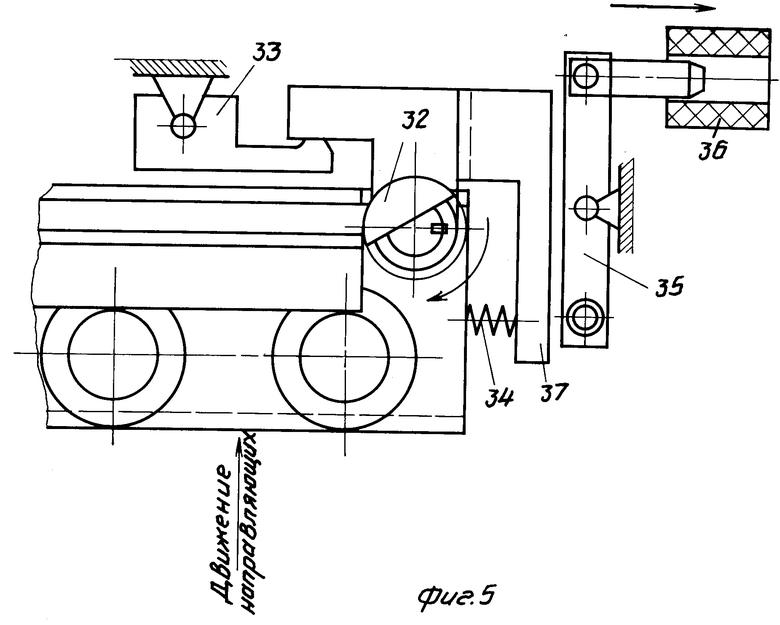
На фиг. 1 механизированный склад, общий вид; на фиг. 2 то же, план; на фиг. 3 приспособление наличия грузоносителя на грузонесущей площадке; на фиг. 4 разрез А-А на фиг. 3, на фиг. 5 устройство для остановки грузонесущих площадок механизма подъема на заданном уровне.
Склад содержит прикрепленные к потолку 1 склада направляющие 2 и 3, на которые опираются катки 4 и 5 манипулятора 6, содержащего механизм 7 подъема и механизм 8 опускания, соединенные между собой рамой 9 перегрузочного конвейера, выполненного в виде роликовой дорожки, на которую полозами 10 опираются грузоносители 11. Механизмы 7 и 8 манипулятора выполнены в виде элеваторов, к тяговым органам которых, выполненных в виде цепей 12 и 13, прикреплены грузонесущие площадки 14, 15, 16, 17. К одному из механизмов прикреплен пульт 18 управления. На уровне каждого яруса установлены управляемые упоры 19 приспособления для освобождения грузоносителей 11. Между механизмами манипулятора размещен стеллаж 20 с наклонными касательными направляющими на каждом ярусе в каждом вертикальном ряду. Каждый вертикальный ряд снабжен фиксирующими планками 21, установленными на одном уровне. На раме механизма подъема укреплен фиксатор 22. Перед стеллажом оборудовано рабочее место 23 для съема и установки штучных грузов, которое является постом комплектации. В конце каждой наклонной направляющей стеллажа размещен фиксатор 24, выполненный в виде срезанного валика, контактирующего с электромагнитом 25 этой направляющей. В нижней части рамы механизма опускания размещен упор 26, выполненный также в виде срезанного валика. На раме 9 установлен привод 27, выполненный в виде двух роликов, расположенных друг над другом. Каждая грузонесущая площадка элеваторов в механизмах подъема и опускания манипулятора снабжена приспособлением наличия грузоносителей, выполненным в виде рычага 28 с подшипником 29, контактирующего с упором 26, выполненным в виде срезанного валика и связанного с рычажным механизмом 30 электромагнита 31. Устройство для остановки грузонесущих площадок механизма подъема на заданном уровне содержит срезанный валик 32, укрепленный на площадках 14 и 17, упор 33, смонтированный на цепи 12 элеватора, пружин 34. Рычажные механизмы 35 с электромагнитами 36, являющиеся управляемыми упорами 19, укреплены на манипуляторе. Упор 26 и рычажный механизм 30 образуют приспособление для изменения угла наклона грузонесущих площадок 14, 15, 16, 17.
Работает склад следующим образом.
На пульте 18 управления задается программа смены грузоносителей (подвесок), например, на седьмом ряду. Манипулятор 6 подводится, например, к четвертому стеллажу и стыкуется с ним при помощи планки 21 и фиксатора 22. Затем включается соответствующий электромагнит 25, который воздействует на фиксатор 24 седьмого ряда, грузоноситель (подвеска) под собственным весом за счет наклонной направляющей скатывается на площадку 15 до упора и, нажимая на конечный выключатель, включает привод цепи 13 на опускание. Грузоноситель опускается вниз до упора 26. При заходе на площадку 15 подвеска, нажимая на подшипник 29, поворачивает рычаг 28 до соприкосновения с рамой этой площадки. За конец последней выходит конец рычага 28 (показано пунктиром). Площадка 15, опускаясь при помощи вышедшего конца рычага 28, цепляется за упор 26 и за счет движения цепи вниз поворачивается влево, при этом происходит расфиксация грузоносителя и она скатывается на направляющую 9 и, подхватываемая приводом 27, перемещает ряд грузоносителей в гору, сталкивая первую подвеску на площадку 17 механизма 7, включается привод цепи 12 и площадка 17 вместе с грузоносителем поднимается вверх до соответствующего управляемого упора 19. При нажатии на упор 19 площадка 17 поворачивается, при этом происходит расфиксация грузоносителя, цепь останавливается, а грузоноситель скатывается на направляющую стеллажа 20. Затем цикл повторяется автоматически. Счетчик числа грузоносителей выдает команду на прекращение перегрузки. Затем фиксатор 22 вытаскивается из гнезда планки 21, и манипулятор с изъятыми грузоносителями перемещается на рабочее место. На перегрузочном конвейере может быть накоплен ряд нужных грузоносителей, которые манипулятором подаются к посту комплектации.
Для того, чтобы срезанный валик 26 освободил конец рычага 28 служит магнит 31, который перемещает шток и поворачивает рычаг 30, разворачивая валик упора 26 по часовой стрелке.
Управляемые упоры 19 работают следующим образом. Грузоносители 11 упираются полозами 10 в срезанный валик 32, который через рычаг 37, связанный с ним, взаимодействует с пружиной 34. Для освобождения грузоносителя электромагнит 36 поворачивает рычаг механизма 35, который нижним плечом воздействует на нижнее плечо рычага 37. Рычаг 37 поворачивает валик по часовой стрелке и освобождает грузоноситель 11, который скатывается на соответствующую накопительную направляющую стеллажа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для загрузки гравитационного многоярусного стеллажа цилиндрическими изделиями | 1989 |
|
SU1654153A1 |
| Устройство для загрузки и разгрузки многоярусных полочных стеллажей | 1980 |
|
SU908669A1 |
| МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 1997 |
|
RU2120012C1 |
| Склад для хранения штучных грузов | 1986 |
|
SU1368232A1 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
| Склад для хранения цилиндрических изделий | 1982 |
|
SU1036628A1 |
| Устройство для загрузки штучных грузов в этажерки подвесного конвейера | 1987 |
|
SU1502444A1 |
| Склад для хранения изделий | 1979 |
|
SU804545A1 |
| МНОГОЯРУСНАЯ АВТОМАТИЗИРОВАННАЯ АВТОСТОЯНКА МОДУЛЬНОГО ТИПА | 2008 |
|
RU2376430C1 |
| СПОСОБ ЗАГРУЗКИ И ВЫГРУЗКИ АВТОМОБИЛЯ В МНОГОЯРУСНОЙ МЕХАНИЗИРОВАННОЙ АВТОСТОЯНКЕ С ОППОЗИТНЫМ РАСПОЛОЖЕНИЕМ ЯЧЕЕК ХРАНЕНИЯ ОТНОСИТЕЛЬНО ШАХТЫ ПОДЪЕМНИКА И АВТОСТОЯНКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2120528C1 |
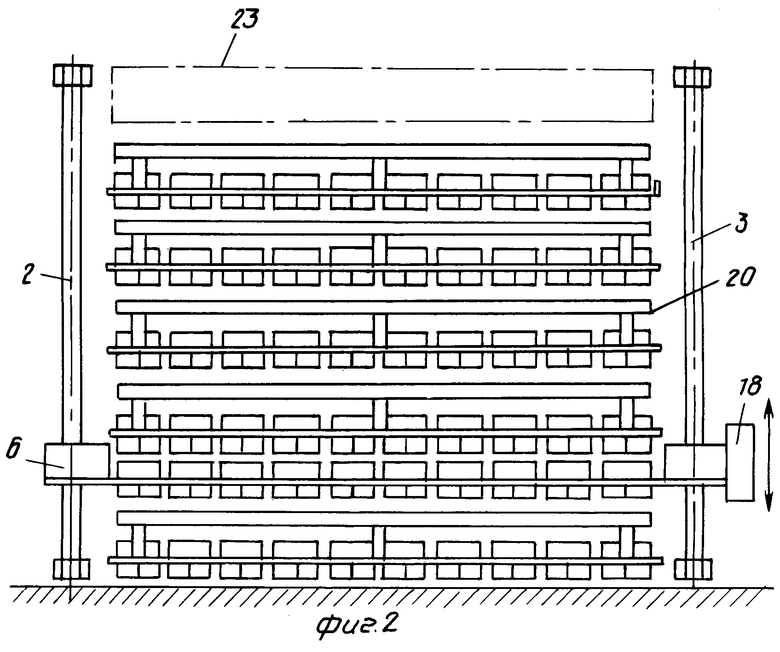
Изобретение относится к складскому оборудованию. Цель изобретения - повышение удобства эксплуатации и упрощение конструкции. Склад содержит прикрепленные к потолку 1 склада направляющие 2 и 3, на которые опираются катки 4 и 5 манипулятора 6, содержащего механизм 7 подъема и механизм 8 опускания, соединенные между собой рамой 9 перегрузочного конвейера, на ролики которого полозами 10 опираются грузоносители 11. Механизмы 7 и 8 манипулятора выполнены в виде элеваторов, к тяговым органам которых прикреплены грузонесущие площадки 14, 15, 16, 17. На уровне каждого яруса установлены управляемые упоры 19. Между механизмами 7 и 8 размещен стеллаж 20 с накопительными направляющими. Стеллаж снабжен на каждом вертикальном ряду фиксирующими планками 21. На раме механизма 7 закреплен фиксатор 22. В конце каждой накопительной направляющей стеллажа размещен фиксатор 24, выполненный в виде срезанного валика, связанного с электромагнитом 25. 1 з.п. ф-лы, 5 ил.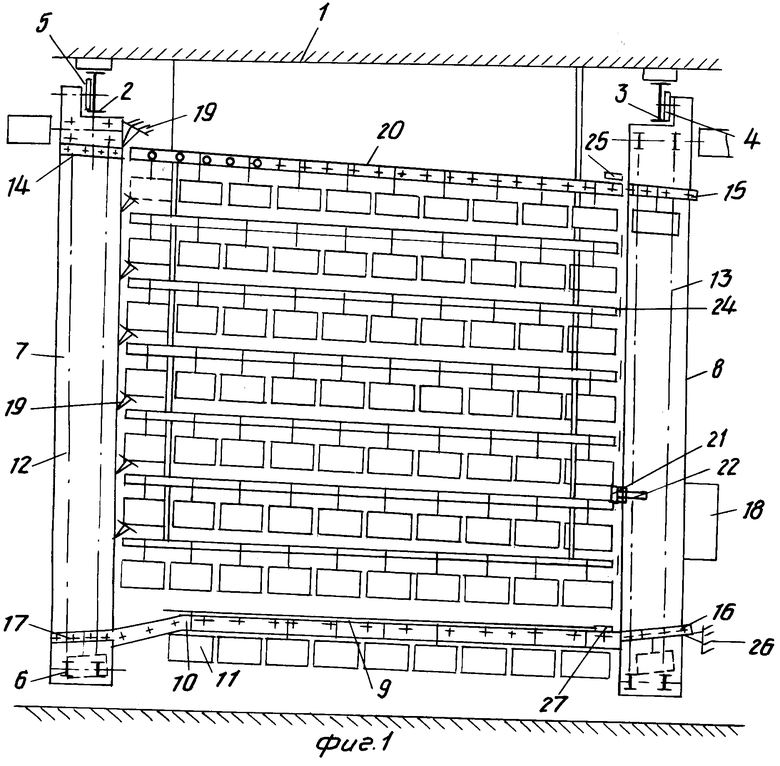
| Система складирования продуктов с использованием несущих элементов | 1981 |
|
SU1271369A3 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
