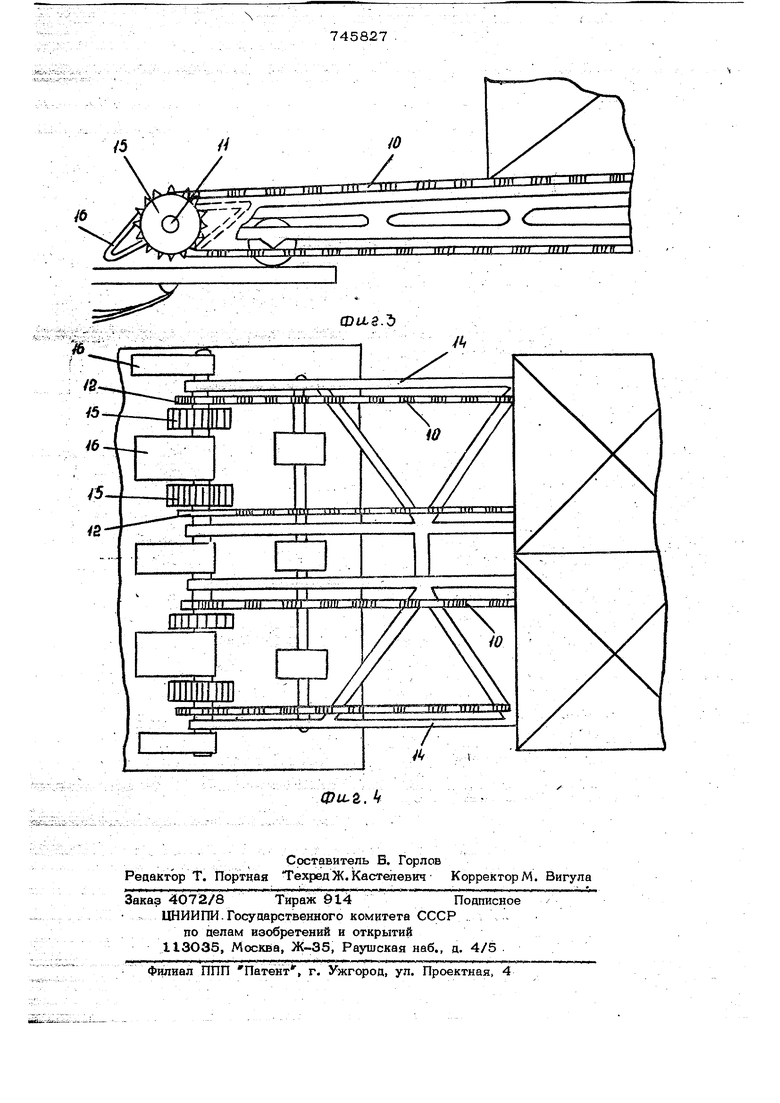
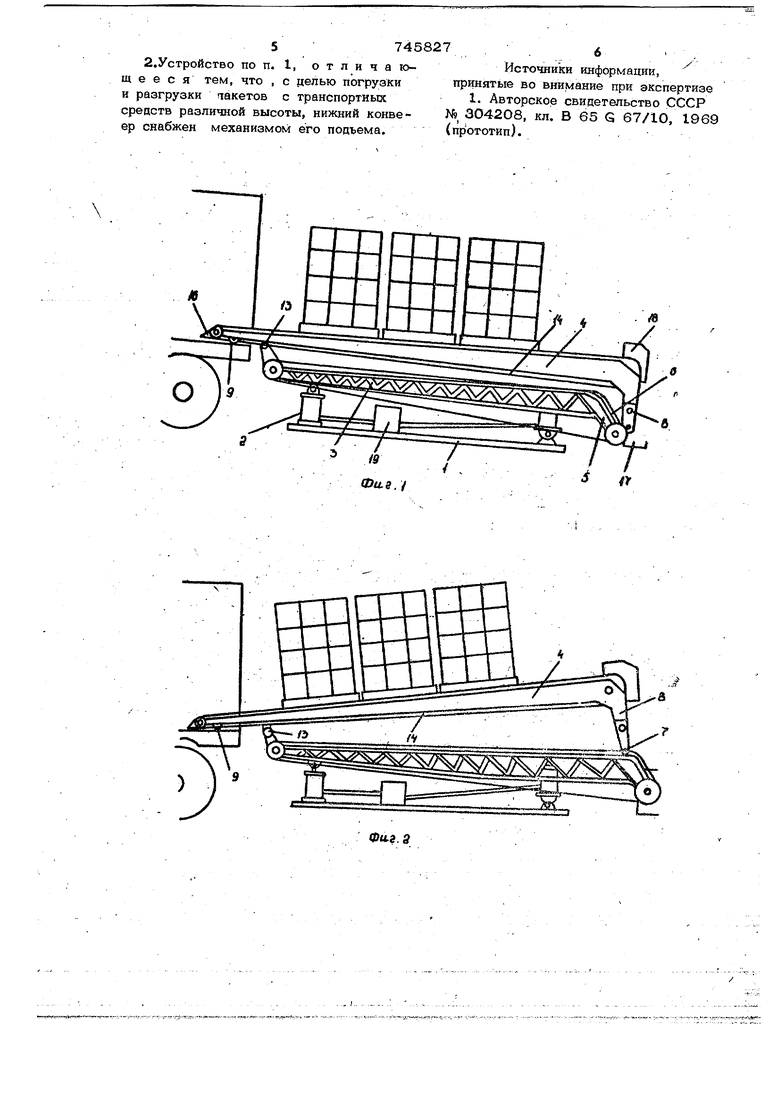
(54) УСТРОЙСТВО ДЛЯ ПЕРЕГРУЗКИ ПАКЕТОВ ГРУЗА , -,:t. . -Изобретение огносигся к перегрузоч ным устройствам, и может использоваться для перегрузки пакетных грузов.. Известно устройство для перегрузки па пакетов груза, содержащее установленные один над другим два ц епных конвейера l. Известное устройство не обеспечивает полного цикла перегрузочных работ, тре - буя дополнительных операций по установке пакетов в нужное положение. Цель изобретения - повышение производительности. Цель достигается тем, что верхний конвейер .смонтирован с возможностью eTO поворота в наклонное Положение и снабжен на одном конце опорными стойками, а на другом конце зубчатыми барабанами и поворотными клиньями, при ЭТОМнижний конвейер снабжен криволинейными направляюшими для перемещения по ним стоек верхнего конвейера. Кроме того, для погрузки и разгру;зкй пакетов с транспортных средств различной высоты нижний конвейер может быть снабжен механизмом его подъема. .На фиг. 1 изображено устройство, . .общий вид на фиг. 2 - то же, при верхнем наклб нй6м положении конвейера; на фиг. 3 изображена передняя часть наклонного конвейера, вид сбоку; на фиг. 4 то же, вид в плане. Устройство состоит из рамы I, смонтированного на ней механизма 2 подъема, нижнего цепного Конвейера 3 и верхнего наклонного цепного конвейера 4. Нижний конвейер 3 выполнен с участ ком вертикального перемещения 5, направ ляйййё 6 которого взаимодействуют с опорами 7 верхнего конвейера, который через стойки 8 опираетсяна цепные звенья нижнего конвейера 3 и в передней части снабжен опорными роликами 9, цепной передачей 10, предназначенной для транспортировки груза и собдийенной с валом 11 через звёздочки 12. Верх V НИИ конвейер 4 опирается на опоры 13. своими направляющими 14. На валу 11 закреплены зубчатые ба- рабаны 15 srntfBbpbTHO установлены клинья 16, имеющие два фйКЬирбвашых положения. Для привода нижнего горизонtanbHoro конвейера 3 предусмотрена привооная станция 17, а для привода верхнего наклонного конвейера - привйдная сташшя 18. Привод подъемного механизма 2 осуществляется от гидропривода 19. Устройство работает следующим об разом. , - . / . В, исходном положении верхний наклонный конвейер 4 загружают пакетами с Т1Ш1Ш ю аяёктропоГ|рузчиков й п6дъемно«транспортнь1х устройств, соединенных со штабелем. Затем подъемным механизмом 2 конвейер поднимают таким образом, чтобы опорные ролики 9 оказались на уровне пола кузова автофургона. Псюле подачи автофургона задним пои опорные ролики 9 оператор §клк чает приводную станцию 17, при этом цепи нижнего конвейера 3 перемещают опоры 7 по участку вертикального переме щения 5 и верхний конвейер 4 п риНиМГет йакпонноё поййЖёйие, при опор ные ролики 9 сопрйкйсатбтся с полом кузеяба и нагрузка переднего конца наклонного верхнего конвейера 4 передается через опорные ролики 9 на дно icy зов а, а опоры 13 освобождаются от йаРрузки. ДалШп|)йвойят Горизонтальное перемещение верхнего наклонного конвейера 4 внутрь автофургона. Достигнув крайнего положения, наклонный конвейер 4 останав ливается . В этот момент включается прйвосдаая станция 18, привбйяШй в овнжение цепи 1О на которых находятся пакеты. Пакет, перемещаясь, благодаря . углу, создаваемому накло шым ксжвейером 4, плавно касается передним пола кузова. При этом передний край пикета Касается попа раньше, чем центр тяжести всего пакета перейдёт ось звездочек 12. После касаний пакетом пола кузова вклк чается станция 17, спомощьк) котфой перемещают наклонный конвейер 4 в стоpOHyi протйвойоложнук ; даяжению :пакетов движения конвейеров 3 и 4 син.хронны и таким образом пакетх.г стаются ОТ-ЯОСИТеЛЬНО аВТОфурГОНП ПС-Г--,:.Д|-,:;- HbJtvJH, накл нный. конвейер 4 Kiisof,;: . из-под пакетов. П ;ХОТЫ : - рВСНа-ЧИГ.ПЬгЙ МОМС л раются fiejpo-vio r кромкой о пол вгуоово jagj№(urtbhfr{ f gfeia W; is - i:----W -/,-.--:. „--A.;r----i«;v - r,J:-T.:,-;L.v,.iwi: :Sif: - :V- Л %t4uit«;«X Li.; v ;:i:r -,.;-,, --,.,..- ..,....,.,....,-.--,--:. .:-,,,-;. . . ,. а затем плавно опускаются по клиньЭм 16 на пол кузова. Таким образом, в один прием осущесо вляетЬя полная загрузка автофургона по г всей длине и ширине кузова. Для осуществления работы устройства в режиме разгрузки устанавливают зубчатые барабаны 15 и складьтают клинья 16. Наклонный конвейер 4 из исходного положения поднимают с таким расчетом, чтобы опорные ролики 9 оказались на yjpoBHe пола кузова автофургона. Затем включается приводная станция 17 и цепи нижнего конвейера 3 перемещают стойки по участку вертикального подъема 5 и конвейер 4 принимает наклонное положение, при этом опорные ролики 9 соприкасаются с попом кузова, а опоры 13 от Нагрузки освобождаются. Далее производится горизонтальное перемещение наклонного конвейера внутрь автофургона и включается приводнаястанция 17 на обратный ход. Достигнув крайних пакетов, зубчатые барабаны 15 подхватывают первый ряд пакетов, приподнимают их , а наклоннЫй конвейер 4, двигаясь вперед, ёходит пой пакеты, которые, перейдя зу&чатые барабаны 15 попадают задним краем на цепь 1О, а передним опираются : 6 пол кузова. Таким образом, наклонный конвейер 4, пёремещаяЬь вглубь кузова, нагружает на себя все пакеты. После этого остана&ливаётся приводная станция 18, а приводная станция 17 включается на обратный ход. Наклонный конвейер 4 при этом вьюодится из автофургона вместе с пакетами. Дальнейшая разгрузка с конвейера 4 может осуществлятьзся электропогрузчиками. Ф 6 р м у л а 3 о б ре тения I. Устройство для перегрузки пакетов груза, содержащее установленные один над другим два цепных конвейера, о т л. и чающееся тем, что, с целью првьшения его производительности, верхний конвейер смонтирован с возможностью его поворота в наклонное положение и снабжен на одном конце опорными трйкамй, а на другом конце - зубчатыми барабпаип и ловоротнь ми клиньями, при 3vo:.j 1.(,й ; чвейер снабжен криволи;;;- п;л;.г)1 копр :/;::;-; -JTIMH ПЛя перемещения по ним стоек bjjixnet-o конвейера. 5745 2.УстройсгБО по п. 1, отличающееся тем, что , с целью погрузки и разгрузки ггакетов с транспортных средств различной высоты, нижний конвеер снабжен механизмом его подъема. 7 Источники информации, принятые во внимание при экспертизе 1. Авторское свидегельство СССР № 304208, кл. В 65 G 67/10, 1969 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для пакетирования тарно-штучных грузов | 1977 |
|
SU686960A1 |
| Устройство автоматизированной погрузки-выгрузки поддонов | 2022 |
|
RU2796435C1 |
| ПЕРЕГРУЖАТЕЛЬ ТАРНО-ШТУЧНЫХ ГРУЗОВ | 2000 |
|
RU2203213C2 |
| Машина для разборки пакетовшТучНыХ гРузОВ | 1979 |
|
SU816916A1 |
| Шагающий конвейер для перемещения компонентов моторных транспортных средств вдоль сборочной линии | 1982 |
|
SU1170964A3 |
| Устройство для транспортирования строительного материала в вертикальном направлении к рабочему месту | 1982 |
|
SU1165229A3 |
| Устройство для разгрузки вагонов | 1985 |
|
SU1346548A1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ГОРОДСКОЙ КОМПЛЕКС И АВТОМАТИЗИРОВАННАЯ ПОДЗЕМНАЯ СИСТЕМА АДРЕСНОЙ ДОСТАВКИ ГРУЗОВ | 2013 |
|
RU2526202C1 |
| Передвижная самоходная машина для перегрузки сыпучих материалов, предназначенная преимущественно для разгрузки крытых железнодорожных вагонов | 1957 |
|
SU111080A1 |
| Устройство для формирования пакетов лесоматериалов | 1981 |
|
SU1008119A1 |