(54) ЭМАЛЙРОВОЧНИЙ АВТОМАТ 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для нанесения эмалевого шликера на внутренние и наружные поверхности полых изделий | 1981 |
|
SU985146A1 |
| Эмалировочный автомат | 1976 |
|
SU615151A1 |
| Эмалировочный полуавтомат | 1991 |
|
SU1799400A3 |
| Головка механического эмалировщика | 1982 |
|
SU1041602A1 |
| Эмалировочный автомат | 1961 |
|
SU148319A1 |
| Головка механического эмалировщика | 1985 |
|
SU1348383A1 |
| Рабочий орган эмалировочной машины | 1977 |
|
SU643550A1 |
| СПОСОБ КОНТРОЛЯ И РЕМОНТА ИЗОЛЯЦИИ ПРОВОДОВ | 2016 |
|
RU2642499C1 |
| Устройство для эмалирования посуды и т.п. | 1937 |
|
SU57580A1 |
| Устройство для эмалирования изделий | 1986 |
|
SU1353838A1 |
1
- , Г
Изобретение относится к койструкциям машин, применяемых при эмалиро.вании изделий. / --:.--.: ,.
Известны различные эмалировочные 5 устройства непрерывного и прерывистого (с остановками в позициях сбро- , са излишков эмали, установки и снятия изделия, а также нанесения эмали) действия. --:.-. л-:-:4 ;-,;-r ;:v«-- 10
Эмалировочные устройства непрерыв- ного действия снабжены непрерывными цепйыйи конвейерами с закреплен - ными на них захватами для из.целий LlJ Главное достоинство машин непрерывного действия - высокая производительность. .
к недостаткам таких устройств относятся металлоёмкость-, сложность и 20 большие габариты. Технологические. - недостатки этих устройств определяются сложностью в перенастррЯкё. режимов эмалирования. - - :.
Указанные недостатки частичноуст-25 раняются в Конструкцияхмногопозицнонных эмалировщиков роторного типа 2J . Однако уменыиениё габаритов и металлоемкоститаких маший приводит к усложнению -ИХ конструкции . . jQ
Кроме того, роторные эмалировщики в силу конструктивных особенностей работают в прерывистом (с остановками) режиме, что, снижая производительность,приводит к усложнению конструкции и лишает их гибкости в подборе необходимых технологических режимов покрытия изделий эмалями.
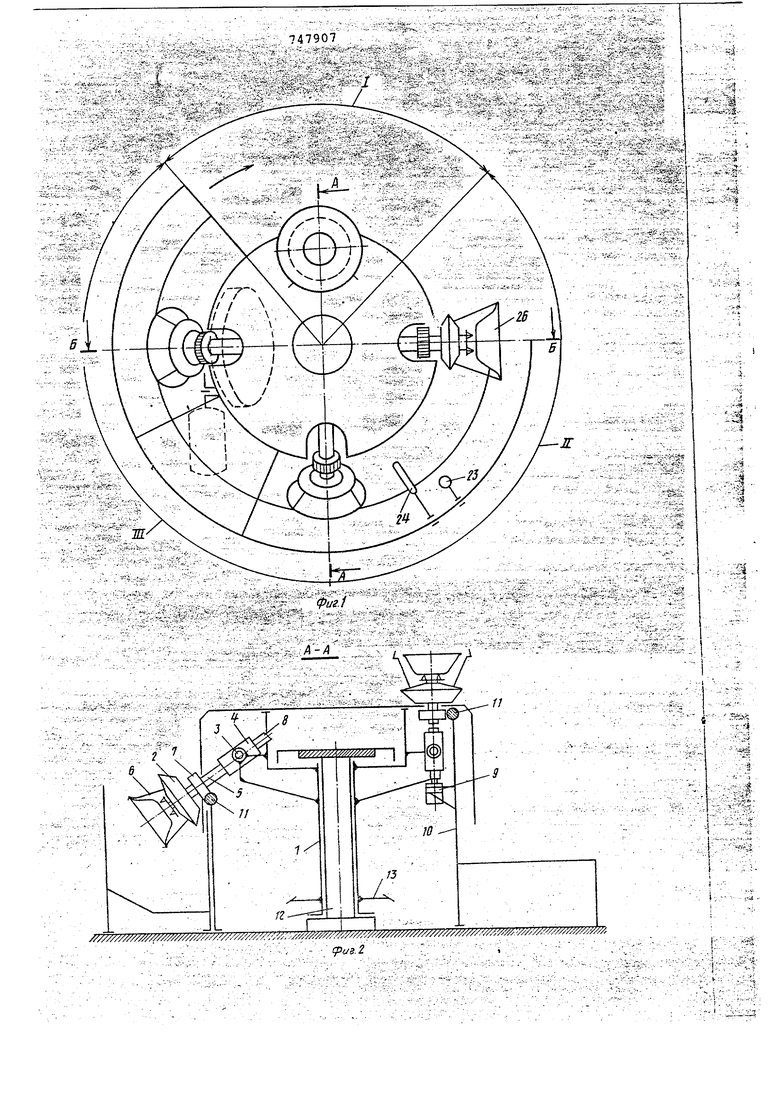
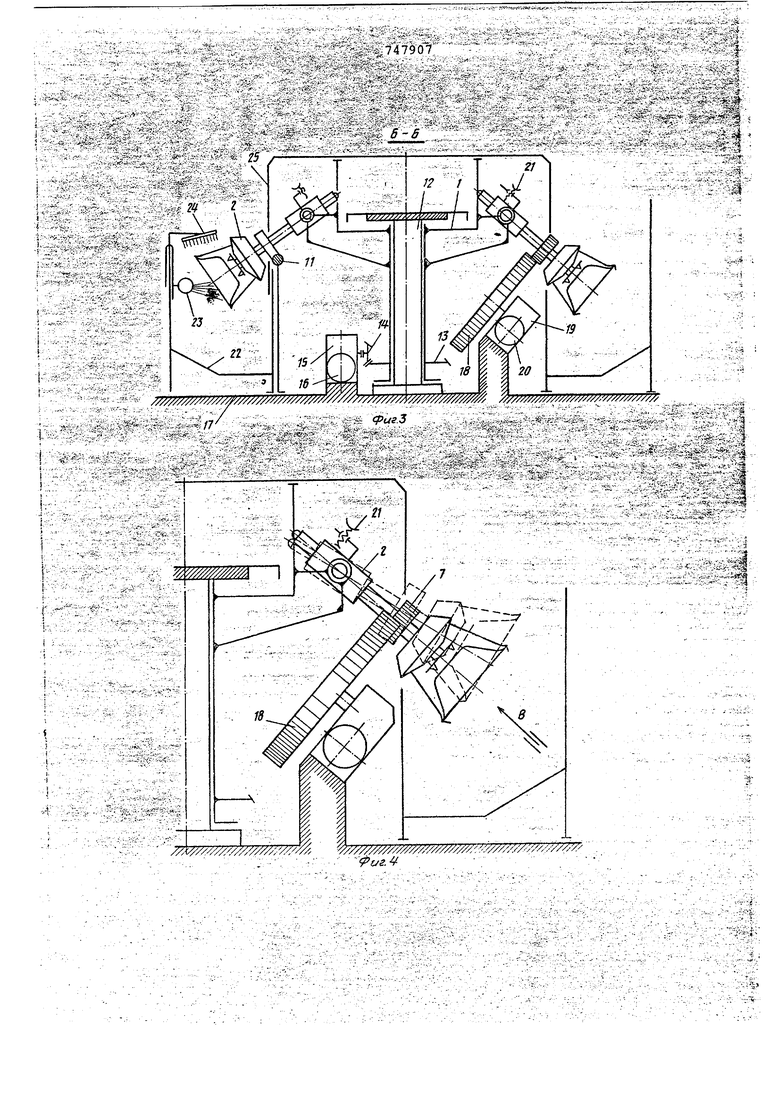
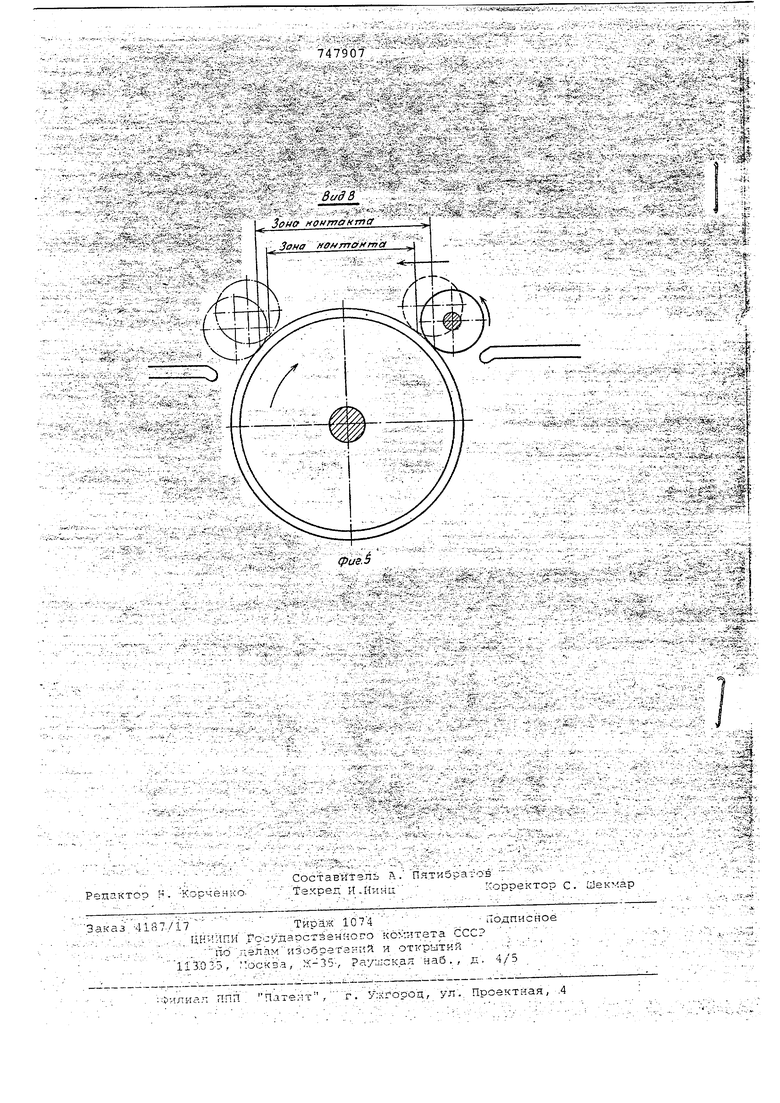
Недостатки этих эмсшировщиков в значительной степени устраняются VB эмалировгшке з .Эмалировщик с целью упрощения переналадки снабжен стационарно установленными приводами прерывистого вращения ротора (карусели) и захвата и средствами передачи вращения захватам в виде шестерен на захватах и приводе вращения.Однако укаЗаСйный эмалировушк не ре--: йает задачу увеличения производительности,, так как использовакное в качестве средства передачи Ера1 ;ения захватам зубчатое зацепление предопределяет останоакУ рОтора (карусели) в Момент зацепления шестерен при сбросе излишков эмали. Это объясняется Тем; что сброс излишков эмали растянут во времени, следовательно передача ври дения захвату отшестерни, устаноБланноЙ нанеподвижном приводе -, f, - С - ,. , , ч. .вращения захвата; требует остановки карусели и закрепленногс) на ней захвата. Наряду с этим при входе и вы,ходе из зацепления шестерен захвата и привода его вращения возникают удары, что снижает стойкость шестерен и ухудшает качество выравнивания эмали на изделии. , С целью устранения указанных не- достатков предлагается-конструкция эмалировочногЬ автоматароторного типа, непрерывного действия, которая - на требуе г остановок ротора в позиции сброса и выравнйва;ния слоя эмали на изделии. Одновременно исключаются остановки при перестройке и выборе, режимов выравнивания слоя эмали. Это достигается Тем, что в качестве привода вращени.я захвата при сбросе и выравнивании слоя эмали используется специальная армированная планшайба с приводом постоянного врагчения, контактирующая на участке сброса излйшко1В эмали с опорным - . роликом здхвата. Максимальная длина участка вращения захвата при сбро се и выравниваний слоя эмали опре--деляется сортношенйем диаметра планшайбы и опорного ролика захвата. - Оптимальное .соотношение диаметров 5:1. Длина участка и время сброса эмали р1ёгулйругатсй специальнйМ упором, ограничивающим найлон захвата и зону контакта опорного ролика с рабочей поверхнортью планшайбы. --, Направление вращенияПЛанша.йбы выбрано taik,что скорость вращения захвата при контакте с рабочей по- . верхностью планшайбй складывается со скоростью его ёращения за счет кару сёли. При изменении скорости вращения ротора (карусели) скорость враще ния захвата может оставаться неизмен ной за счет регулирования числа оборотов планшайбы. Введение; в качестве средства пере дачи вращения специальной планшайбы, фрикционно связанной с опорным роликом захват, обеспёчивает контакт рабочей поверхности, планшайбы- опорного захватана значительной длине при перемещении, что исключает необходимость в остановке ротора (карусели) в момент сброса излишков эмали Все это.. п6зй.сЗ)1Яёт увеличить производительность автомата. Постоянное вра щение каруселиипривода сброса эмал упрощаетсхему управтения машиной, , конструкцию привода и переналадку . режимов сброса и выранизания нанесен : ного на изделие слоя эмали. Наряду с этим улучшаются.услдвия сброса излишков эмали за с.чет качания захва .та с изделием при огибании рабочей поверхности планшайбы. На фиг.1 изображенэмалировочный автомат, вид в плане, ча фиг.2 - то же, разрез Л-А йа фиг.1; на фи-г. 3 ; 7 ч J r.-i -riS J - - . азреЪ Б-Б нафиг.; на фиг. 4 - схема аботы упора при регулировании зоны онтакта; на фиг.5 же, вид по трелке В на фиг. 4. , .v В процессе эмалирования из делие роходит три участка (фиг.1): , „ . участок Т снятия изделия, покрыого эмалью, й установки нового зделия в захват; участок Т Г установки изделия для блива эмалью; - участок III сброса излишков эмали выравнивания слоя эмали на поверхости изделия. - , ., , tf ,- 7i -«;-. Эмалировочный автомат состоит из карусели 1, в четырёх крестовинах кото- рой установленОчетыре зах-вата 2 для изделий Захваты установлены с возможностью качания вокруг оси 3 карусели. Захват 2 выполнен в виде корпуса 4, в которОм установлена полая ось 5 с шарнирно закрепленными рычагагли б для захвата изделий. Ось 5 вместе с pH4araNta 6 может свободно вращаться на; подшипниках в корпусе 4. На оси 5 Неподвижно установлен опорный ролик 7. Внутри полой оси 5 смонтирован подпружйнечный подвижный шток; с; шаровой опорой 8 на конце. При его перемещении внутри полой оси 5,.рычаги б захвата сводятся или раскрываются, э соо.тветственно Зс1жимая или освобождая изделие.Перемещение рьтагов б осудест.вляется при взаимодействии шари;ковОй опоры 8 с неподвижным кОпи- ром9 , смонтированйым на стойке 10 эмалировочного автомата ( участок 1). На аналогйчных стойках закреплен кру- говой копир 11 установки захватов 2. Установка за хватов 2 из наклонного до вертикального положения- (фиг. 2) осуществляется при качении опорного ролика 7, перемещающегося по копиру 11. Одновременно с установкой захва а 2 из наклонного в ;вертикальноё положение полая .ось 5 вместёГс йзде- ;. лием вращается в корпусе 4. ОпороЙ iv карусели 1 служит неподвижная стойка 12. В нижней части карусели закреплено кЬническоё кЪлесо 13 ,вращение которому передается Через ще.стерню14, установленную на выходном валу редуктора 15. Редуктор соединен с электрОдвигатёлем 16. . . . ;; На общей раме 17 эмалировочного . автоматаустановлен привод вращения захватов, выполненный в армированной планшай 5ы 18, закрепленной на в.ыходном валу редуктора 19, связанного с ЭЛёктродвигателем 20 вращения ;; планшайбы. Привод монтируетсл на наклонной опоре, закрепленной на раме 17. В ка-ждой из четырех крестовин карусели 1 против захвата 2 установлено четыре--йпециальных упора 21, которые регулйрУЮ зону контакта опорного ролика 7 захзатас -рабочей поверхностыр планшайбы 18. На участках ГГ и 111 изделие находитсянадванной 22 сбора эмали. На этой же ванне крепятся устройства 23 и 24 для внутрен..него и наружного полива иэделия -эмгСлью. Из ванны 22 насосом эмашь подается вустройства 23 и 24 полива изделия. ; Все детали эмалировочнЬг д автомата закрыты кожухом25, . ленным на карусели 1. Автомат работает следующим образом.- ;-.. в начале участка 1 (по ходу вращения карусели) захват с изделием 26, /покрытым эмалью,уста11авливается в вертикальное положение (фиг.2, правый захват) . опора 8 подвижного штока при вращении карусели ;с захва:/том наезжает на неподвижный копир 9 .и рычаги6 захвата 2 раскрываются, освобождая изделие.. После снятия изделия в освободившийся эахв т устанав ливается новое изделие, которое при .подходе.захвата к конйу участка 1 за жимаётЬя рйчагамй б . При дальнёйшем перемещений изделия. оно опускается и . на участке 11 над ванной 22 попадает в зону облива эмалью (фиг.З). На участке 111 изделие (в начале участка) вращается с минимальной скоростью f- за счет перекатыванйя опбрнбго ролика 7 захвата по круговому копиру 11 (фиг.2,левое изделие).При дальнейшем вращении карусели опорный ролик 7 . захвата попадает на рабочую поверхность армированной планшайбы 18, кото рая вращается навстречу вращению карусели. На всем участке контакта рЬлика 7 с планщайбой 18 изделие вращается со скоростью, определяемой .скоростью вращення карусели и .планшайбы. Длина участка контакта ролика 7 и планшайбы 18 регулируется упором 21. Придальнейшем вращении кару; сели ролик 7 захвата попадает на . круговой копир 11; снижается скооость вращения изделия, при этом захват устанавливается вертикаль.но и при 7 fSft tf JSSis-sJtvS-sSSSs- 7 подходе его к kofrtipy 9 в начале участка 1 все операции повторяются в. указанной поеяедовательности. ; Предложеннай конструкция эмалировочного a TOMata позврлйт ;при упрощении схе1 -управления, умёйъшё-- :- НИИ габарйтбв машины к металлоем- ;. кости увеличить производительность. Непрерывная работа дает возможность при выборе скорости вращения ка- русели ориентироваться только на, время, необходимее на установку « - иля снятие из дели я и тем самым до- вести производительность до производительности эйалировщиков непрерывного действ.ия. Опытная проверка показывает, что производительность автомата может быть доведенаДО 6,5-7,2 тыс. крупногабаритных .изделий в смену. - . .. Формула изобретения v , -, - -f- . Эмалировочнкй автомат, содержащий карусельС захватами . Механизм . загрузки и вйгрузки изделий, привод вращения карусели, привод вращения захватов в виде опорного ролика ; и копиры для управления захватами , О я щ и и с я тем, что, ; с целью улучшения качества покрытия и упрощения конструкции, привод вращения захватов выполнен в виде армированной планшайбы, а автомат снабжён упором для регулирования аоны контакта опорного ролика с рабочей поверхностью планшайбы :- Источники информации, принятые во внимание прИ экспертгйзе 1. Авторское свидетельство СССР 120724, кл. С 23 D 5/02, 1958. - .2. Механизация и автоматизация малирования, Труды НИИ, Новочер- асск, 1Э67, т. 174; с.;40-47. 3. Авторское сзидетельстзо СССР о заявке К 2350613 ,кл.с 23 D 5/02, 976., - . - ; ;; { -, J--, 4 , ,- ,. - .; //////////////////////////////////////////л ///////,// ;,.-- --- - . .i „ -- -.-ад.. С л -/:: - -; , у////////////////л /////////: у/////::/ Фиг. ЙШгЙЩ Х:У5$л-К - -:-;;«5;л4 V л-;,,-- ЩШЩ:: i 4 fte ;i, 4 ; ;Шй 5;ШШЩ :V:. .vi5 ;f ;-fpa-iir J;iS3,
747907
