(54) ШАГОВЫЙ КОНВЕЙЕР
| название | год | авторы | номер документа |
|---|---|---|---|
| Кантователь деталей в автоматических линиях с шаговым конвейером | 1980 |
|
SU918210A1 |
| ШАГОВЫЙ КОНВЕЙЕР | 1994 |
|
RU2078727C1 |
| Шаговый конвейер | 1976 |
|
SU610748A1 |
| Устройство для шагового перемещения конвейера | 1989 |
|
SU1682266A1 |
| Промышленный робот | 1977 |
|
SU738864A1 |
| Устройство для шаговых перемещений груза | 1989 |
|
SU1698155A1 |
| АГРЕГАТ ДЛЯ УКЛАДКИ ОПТОВОЛОКОННОГО КАБЕЛЯ НА ПРОВОД ВОЗДУШНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧ | 1996 |
|
RU2124256C1 |
| Шаговый конвейер | 1982 |
|
SU1062142A1 |
| Подвесная роликоопора ленточного конвейера | 1986 |
|
SU1404421A1 |
| Автоматическая линия для упаковывания ампул | 1987 |
|
SU1521663A1 |
1
Изобретение относится к конвейерам и может быть использовано во всех отраслях народного хозяйства для шаговой подачи носителя : точной его остановкой.
Известно устройство для точной остановки и перемещения носителя относительно рабочих органов, содержащее носитель, привод прерывистого перемещения конвейера, выполненного в виде шагового перемещающегося пальца, входящего в гнезда носителя. В этом устройстве носитель жестко прикреплен к конвейеру 1.
Недостатком этого устройства является отсутствие возможности надежно останавливать в заданном месте носители, не закрепленные на конвейере. Это обусловлено тем, что в известном устройстве надежность работы установки зависит от точностей хода механизма щагового перемещения конвейера и расстояния между гнездами в носителе, а также от надежности работы механизма перемещения пальца в двух взаимно перпендикулярных направлениях.
Наиболее близки.м к предлагаемому по технической сущности и достигаемому результату является шаговый конвейер, содержащий установленные на тяговом элементе конвейера между направ.1яю1цими носители, механизм фиксации носителей и механизм шагового перемешения конвейеР 2.
Недостаток указанного конвейера заключается в том, что наличие в нем тормозных колодок, прикрепленного к ним рычага со стопором, устройства для подвижного .монтажа носителя на направляющей значительно усложняет его конструкцию. Кроме того, данная конструкция не обеспечивает бес10препятственного снятия носителя при передаче его с изделиями на другие устройства для выполнения последующих автоматических операций, а также останов носителя с помощью стопора, расположенного на двуплечем рычаге тормозной колодки носителя,
15 снижает надежность работы конвейера.
Целью изобретения является упрощение конструкции и повыщение надежности конвейера.
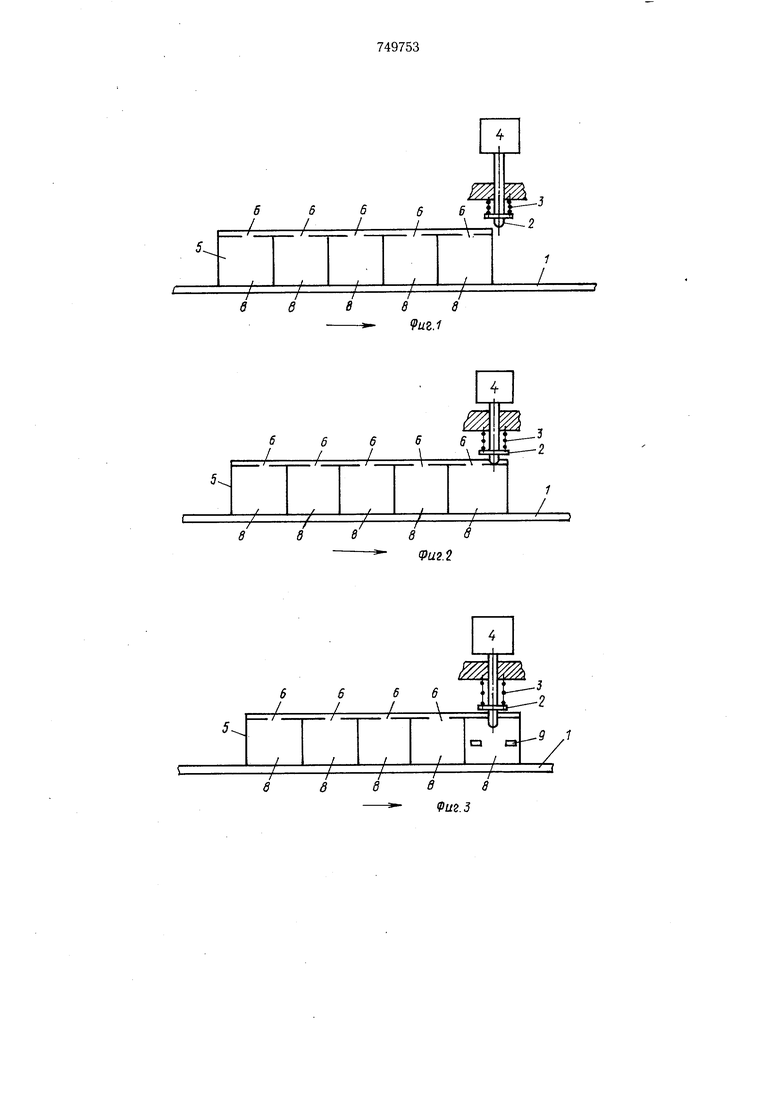
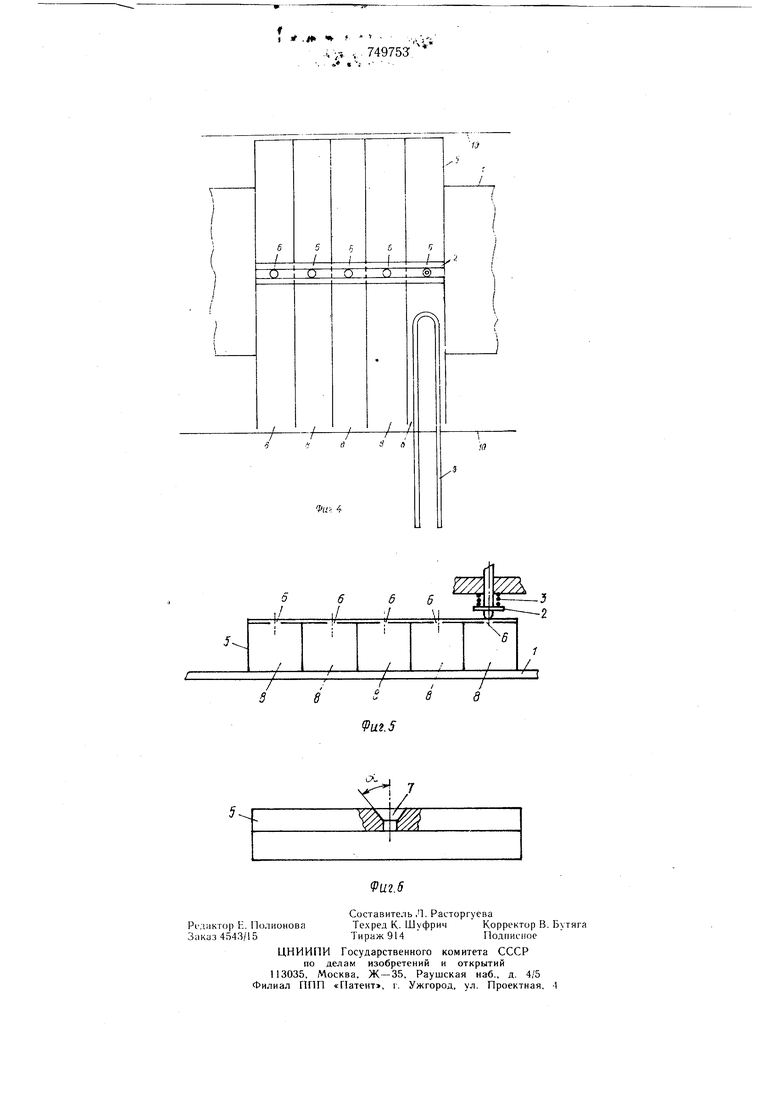
Это достигается тем, что носитель имеет продольную с наклонными стенками канав20ку с расположенными в ней на расстоянии щага перемещения гнездами, а механизм фиксации носителя выполнен в виде пальца, установленного с возможностью взаимодействия с отверстиями и канавкой в носителе . На фиг. 1, 2, 3 изображено устройство в различные моменты времени; на фиг. 4 - то же, в момент остановки носителя и его загрузки; на фиг. 5 - то же, вид сбоку; на фиг. 6 показано выполнение канавки в носителе. Конвейер содержит тяговый элемент 1 например ленту, палец 2 с механизмами 3 его прижатия и механизмом 4 его подъема, носитель 5 с гнездами 6, расположенными в канавке 7, пазами 8 для загрузки их грузами 9, например шинками тяговых двигателей, и ограничители носителя 10. Работает устройство следующим обраВ начале хода тягового элемента 1 (например, ленты конвейера) палец 2 поднимается так, что носитель 5 перемещается вместе с тяговым элементом 1. Носитель 5 подходит под палец 2, самоустанавливаясь относительно его, для чего палец 2 опускается в канавку 7 и прижимается к носителю 5 механизмом 3 прижатия. Благодаря движению носителя 5 происходит автоматический поиск гнезда 6 и заход пальца 2 в . Таким образом, носитель 5 останавливается пальцем 2. Затем груз 9, в данном случае щинка тягового двигателя, входит в соответствующий паз 8 носителя 5. Аналогично продолжается перемещение носителя 5 на щаг и заполнение паза 8. Процесс заполнения данного носителя 5 заканчивается йосле заполнения всех его пазов 8 грузами 9. После чего начинается заполнение очередного носителя 5. Для обеспечения больщей надежности работы в начале и в конце хода тягового элемента 1 при заторможенном носителе 5 происходит проскальзывание их относительно один другого. Поэтому шаговый ход тягового элемента 1 больше расстояния между гнездами 6 носителя 5 на абсолютную величину допуска упомянутого расстояния. Поперечное перемещение носителя 5 лимитируется ограничителями носителя 10, установленными так, что палец 2 не выходит за пределы канавки 7. При поступательном движении на носитель 5 действуют силы PKi и QK, гдеРК1-сила трения пальца о носитель; QKa-сила трения носителя о тяговый элемент; к 1 - коэффициент трения пальца о носитель; Кг-коэффициент трения носителя о тяговый элемент, например ленту конвейера. Поэтому передвижение носителя 5 относительно пальца 2, когда он прижат к последнему, возможно только, если выполняется соотношение: РК, QKz Кроме того, для поперечного смещения носителя 5 с целью совмещения оси канавки 7 с осью пальца 2 палец 2 нажимает на боковую стенку канавки 7. При этом на носитель 5 действуют силы трения носителя о тяговый элемент 1, горизонтальная составляющая силы трения пальца 2 о носитель 5 и активная сила - горизонтальная составляющая давления пальца 2 на наклонную стенку канавки 7. Следовательно, для осуществления поперечного смещения носителя 5 под действием пальца 2 угол наклона а стенок канавки 7 к вертикали должен быть таким, чтобы сохранилось соотнощение: р ..SOC-JCi ML O.v. , а Конструкция предлагаемого конвейера повышает точность остановки незакрепленных (свободно уложенных) на конвейере грузов, устраняя зависимость точности остановки от точностей шагового перемещения конвейера и расстояния между гнездами в носителе, при этом она проста и надежна в работе. Формула изобретения Шаговый конвейер, содержащий установленные на тяговом элементе конвейера между направляющими носители, механизм фиксации носителей и механизм шагового перемещения конвейера, отличающийся тем, что, с целью упрощения конструкции и повышения надежности конвейера, носитель имеет продольную с наклонными стенками канавку с расположенными в ней на расстоянии щага перемещения гнездами, а механизм фиксации носителя выполнен в виде пальца, установленного с возможностью взаимодействия с отверстиями и канавкой в носителе. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 179662, кл. В 65 В 35/24, 1963. 2.Авторское свидетельство СССР № 135815, кл. В 65 G 47/46, 1961 (прототип) .
вв
88
PuZ.1
