(54) ШАГОВЫЙ КОНВЕЙЕР
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перегрузки грузов на приемные конвейеры | 1988 |
|
SU1655874A1 |
| Шаговый конвейер | 1979 |
|
SU846438A1 |
| Опора тягового органа элкоп | 1978 |
|
SU775009A1 |
| Установка для контроля герметичности полых изделий | 1986 |
|
SU1401308A1 |
| Грузоподъемная площадка крана-штабелера для поддонов с пазами под грузозахватные элементы | 1982 |
|
SU1058835A1 |
| Устройство для перегрузки изделий | 1983 |
|
SU1181968A1 |
| Поточная линия для обработки изделий | 1982 |
|
SU1081101A1 |
| НАКОПИТЕЛЬНЫЙ КОНВЕЙЕР ШТУЧНЫХ ГРУЗОВ | 1991 |
|
RU2018472C1 |
| Автооператор | 1975 |
|
SU549314A1 |
| Вертикально-замкнутый тележечный конвейер | 1982 |
|
SU1077828A1 |

1
Иаобрегение огносигся к транспортирующим усгройсгвам, которые преимущественно используются как технологический внутрицеховой транспорт.
Известно транспортное устройство, выпол ненное в виде ряда горизонтальных несущих штанг, опирающихся на качающиеся эксцентриковые ролики и получающих возвратно-поступательное движение от коромыспо-шатунн ных механ-измов: несущие горизонтальные щтанги опираются на стационарные и качающиеся эксцентриковые ролики, коленчатые валы которых, связанные между собой тягами, приводятся в движение ог коромысло-щагунныхМеханизмов, на коромысле которых смонтированы ролики, взаимодействующие с поворотными профильными кулачками .l,
Наиболее близким техническим рещением к описанному изобретению явпяется шаговый конвейер, включающий корпус, две грузонесущие подвижные рамы, установленные на подвижных катках и связанные соответствен с противоположными ветвями бесконечного тягового органа механизма возвратно-поступательного движения тяговыми кронщтейнами 2..
Недостаток указанных устройств состоит в том, что перемещение грузов за цикл равно лишь ходу привода возвратно-поступательного движенияj что не позволяет ращирить технологические возможности конвейера.
Цепью изобретения является расширение технопогических возможностей конвейера.
Цель достигается тем, что оси катков одной из; рам расположены. на корпусе, при этом, по крайней мере, один тяговый кронштейн снабжен съемным Пальцем и звездочкой с копьцёвым пазом и упором, которая установлена с возможностью взаимодействия со съемным паиьцем через упор,
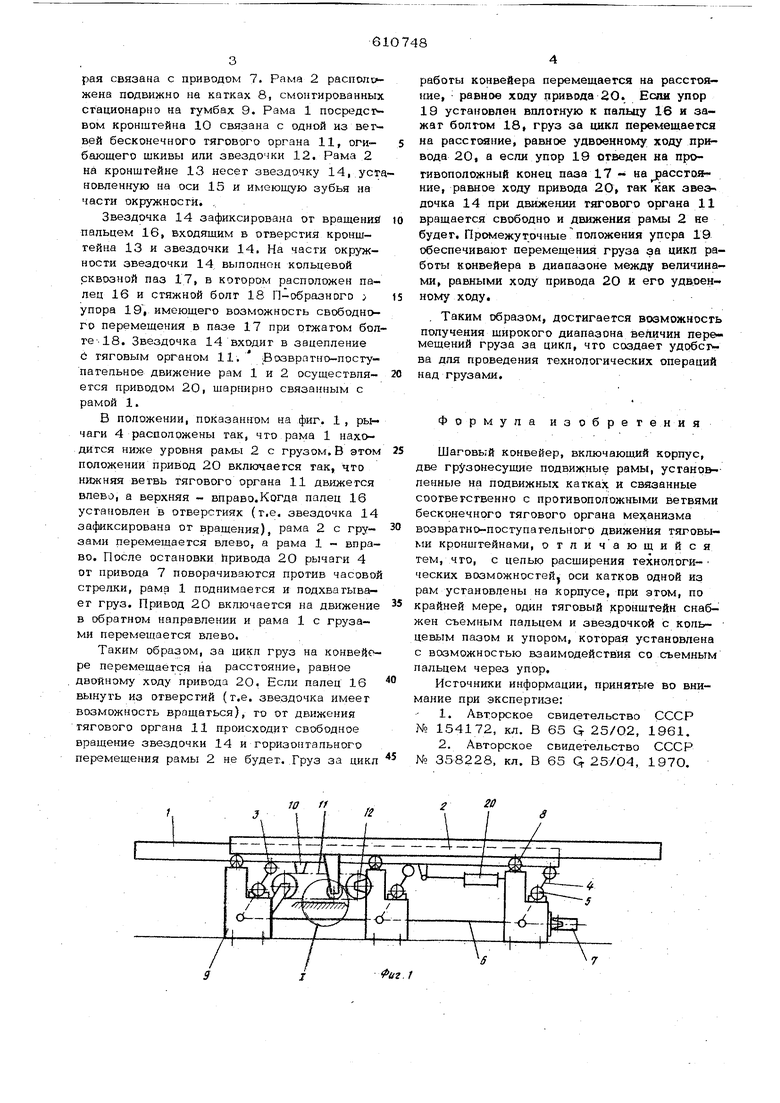
На фиг, 1 изображен описываемый конвейер; на фиг. 2 - то же, узел Т на фиг, 1: на фиг, 3 - разрез по А-А на фиг 2; на фиг 4 - разрез по Б-Б на фиг, 2,
Конвейер содержит двегрузонесущие рамьг 1 и 2, из которых рама 1 подвижно установлена на кагках 3 поворотных рычаго 4, жестко размещенных на-осях 5 и соединенных между собой жесткой тягой 6, которая связана с приводом 7. Рама 2 располс жена подвижно на кагках 8, смонгированных стационарно на гумбах 9. Рама 1 посредством кронштейна 10 связана с одной из ветвей бесконечного тягового органа 11, огибающего шкивы или звездочки 12. Рама 2 на кронштейне 13 несет звездочку 14,.уста новленную на оси 15 и имеющую зубья на части окружности. , Звездочка 14 зафиксирована от вращений пальцем 16, входящим в отверстия кронштейна 13 и звездочки 14. На части окружности звездочки 14 выполнен кольцевой сквозной паз 17, в котором расположен палец 16 и стяжной болт 18 П-образного ;. упора 19, имеющего возможность свободн1 го перемещения в пазе 17 при отжатом бол ге--18. Звездочка 14 входит в зацепление с тяговым органом 11. Возвратно-поступательное движение рам 1 и 2 осуществляется приводом 20, шарнирно связанным с рамой 1. В положении, показанном на фиг. 1 , рычаги 4 расположены так, что рама 1 находится ниже уровня рамы 2 с грузом. В этом положении 2О включается гак, что нижняя ветвь тягового органа 11 движется влево, а верхняя - вправо.Когда палец 16 установлен в отверстиях (т.е. звездочка 14 зафиксирована от вращения), рама 2 с грузами перемещается влево, а рама 1 - вправо. После остановки йривода 20 рычаги 4 от привода 7 поворачиваются против часово стрелки, рама 1 поднимается и подхватывает груз. Привод 20 включается на движение в обратном направлении и рама 1 с грузами перемещается влево. Таким образом, за цикл груз на конвейе ре перемещается на расстояние, равное двойному ходу привода 2О. Если палец 16 вынуть из отверстий (т.е. звездочка имеет возможность вращаться), то от движения тягового органа 11 происходит свободное вращение звездочки 14 и горизонтального перемещения рамы 2 не будет. .Груз за цикл работы конвейера перемешается на расстояние, равное ходу привода 20. Есди упор 19 установлен вплогную к пальцу 16 и зажат болгом 18, груз за цикл перемешаегся на рассгсяние, равное удвоенному ходу привода 20, а если упор 19 отведен на противоположный конец паза 17 - Ha accTDJbние, равное ходу привода 20, гак как звездочка 14 при движении тягового органа 11 вращается свободно и движения рамы 2 не будет. Промежуточные положения упора 19 обеспечивают перемещения груза за цикя работы конвейера в диапазоне между величинами, равными ходу привода 20 и его удв.оенному ходу. Таким образом, достигается возможность получения широкого диапазона величин перемещений груза за цикл, что создает удобсгва для проведения технологических операций над грузами. Формула изобрет е н и я Шаговый конвейер, включающий корпус, две грузонесущие подвижные рамы, устанр&-ленные на подвижных катках и связанные соответственно с противоположными ветвями бесконечного тягового органа механизма возвратно-поступательного движения тяговыми кронштейнами, отличающийся тем, что, с целью расширения технологических возможностей, оси катков одной из рам установлены на корпусе, при этом, по крайней мере, один тяговый кронштейн снабжен съемным пальцем и звездочкой с кольцевым пазом и упором, которая установлена с возможностью взаимодействия со съемным пальцем через упор. Источники информации, принятые во внимание при экспертизе: 1.Авторское свидетельство СССР № 154172, кл. В 65 О- 25/02, 1961. 2.Авторское свидетельство СССР № 358228, кл. В 65 Q 25/04, 197О.
/j
n
иг.г
JS
A-A
ГШП
Г6
--&
Фиг.З
s-e
