Изобретение относится к элементам подъемно-транспортных и роботизированных систем и к захватным устройствам.
Целью изобретения является упрощение конструкции захватного устройства и повышение надежности захвата и удерживания переносимой детали.
На фиг. 1 представлен момент приближения устройства к захватываемой детали; на фиг,2 - момент касания устройством за- хватываемой детали; на фйг.З - момент захвата устройством захватываемой детали; на фиг.4 - момент переноса устройством захваченной детали.
Устройство (фиг.1), закрепленное про- мышленного манипулятора 1, содержит привод вращательного движения 2, на оси которого свободно установлен упор 3 и закреплен эксцентрик 4, со свободно на внешней его цилиндрической поверхности установленным несущим элементом 5, соединенным посредством пружин 6 с кольцом 7, закрепленным на корпусе привода вращательного движения, причем несущий элемент выполнен с отверстиями, в которых расположены с возможностью осевого перемещения упругие зажимные пальцы 8, верхняя часть которых имеет буртики, а нижняя выполнена в виде наконечников.
Для работы устройство фиксируется з вертикальном положении в схвате промышленного манипулятора 1.
В исходном положении зажимные пальцы 8 находятся в .нижнем положении по отношению к несущему элементу 5 и опира- ются в него буртиками (фиг.1).
Захватное устройство работает следующим образом.
Устройство опускается на захватываемую деталь 9, уложенную на основании 10, до взаимодействия с упором 3, свободно установленном на оси вращения эксцентрика 4, При опускании захватного устройства на захватываемую деталь 9, пальцы 8, попавшие на деталь 9 (в площадь детали) оста- наливаются, а остальные опускаются так, что их наконечники располагаются по ее периметру, опираясь буртиками на несущий элемент 5 (фиг.2). При включении привода 2 эксцентрик 4 начинает вращаться, а верхние концы пальцев 8 начинают двигаться по замкнутым траекториям, приближаясь и удаляясь от оси вращения эксцентрика 4. При этом часть зажимных пальцев 8, попавших на деталь 9, соскальзывают с нее, скаются вниз и после одного оборота эксцентрика 4 захватываемая деталь 9 зажимается выгнутыми зажимными пальцами 8 по периметру со всех сторон (фиг.З). При дальнейших оборотах эксцентрика 4 расположение зажимных пальцев 8 на захватываемой детали 9 не меняется. Захват детали 9 осуществляется во время первого оборота эксцентрика 4. После этого манипулятор поднимает и перемещает захватное устройство с захваченной деталью 9 в заданное место (фиг.4).
Для освобождения перенесенной детали 9, над местом ее сбрасывания включается привод вращательного движения 2. Под действием сил инерции упругие захватные пальцы 8 деформируются и освобождают перенесенную деталь 9, которая под действием сил тяжести падает в заданное место. После сброса перенесенной детали 9, устройство возвращается в исходное положение и цикл повторяется снова.
Эффект от использования предлагаемого изобретения заключается в упрощении конструкции захватного устройства и в повышении надежности захвата и удерживания переносимой детали.
Упрощение конструкции устройства достигается за счет применения более простого привода, жесткого несущего элемента и тонких длинных упругих зажимных пальцев, установка которых не требует втулок или пружин.
Повышение надежности захвата и удерживания переносимой детали достигается устранением взаимодействия зажимных пальцев между собой через гибкий несущий элемент, то есть каждый деформированный палец удерживает деталь независимо от деформации соседнего пальца, а также увеличением их плотности в несущем элементе, так как не нужны втулки и пружины для их установки. Использование упругих зажимных пальцев позволяет избежать повреждения захватываемых деталей вследствие усилия зажима. Такая конструкция обеспечивает высокое быстродействие захватного устройства при манипулировании объектами с большим разнообразием размеров, форм и их положения. Адаптация схвата к этим параметрам исключает необходимость его переналадки при изменении ассортимента мэнипулируемых объектов.
Фор мула изобретения
Захватное устройство, содержащее корпус с подвижным от привода несущим элементом, в котором с возможностью осевого перемещения установлены зажимные пальцы с буртиками на верхних концах, отличающееся тем, что, с целью упрощения конструкции и повышения надежности, оно снабжено последовательно смонтированными на оси приводом, выполненным вращательным, упором и эксцентриком, причем эксцентрик свободно
установлен а несущем элементе, а упор установлен на конце оси привода в рабочей зоне захвата, при этом зажимные пальцы
выполнены из упругого материала, а несущий элемент подпружинен относительно корпуса привода.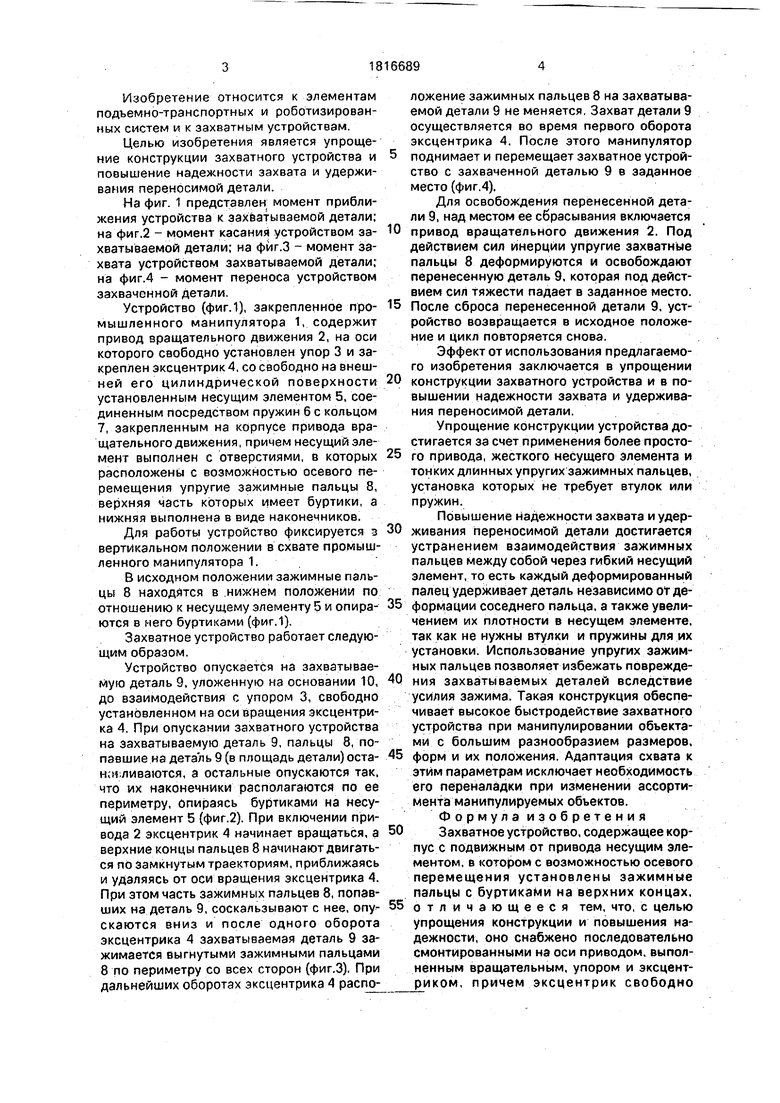
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1984 |
|
SU1220793A1 |
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |
| Групповой схват | 1986 |
|
SU1333576A1 |
| Схват промышленного робота | 1985 |
|
SU1324846A1 |
| Схват манипулятора | 1985 |
|
SU1268409A2 |
| Схват робота | 1983 |
|
SU1117205A1 |
| Схват | 1987 |
|
SU1407796A1 |
| Схват | 1990 |
|
SU1811477A3 |
| Схват | 1979 |
|
SU837922A1 |
| Захватное устройство для отделения текстильных изделий от стопы | 1989 |
|
SU1719291A1 |

Использование: подъемно-транспортные и роботизированные системы и захватные устройства. Сущность изобретения: захватное устройство содержит подвижный от привода 2 несущий элемент 5, в котором с возможностью осевого перемещения установлены зажимные пальцы 8. выполненные из упругого материала, с буртиками на верхних концах. На оси привода вращательного движения последовательно смонтированы упор 3 и эксцентрик 4, свободно установленный в несущем элементе 5. Несущий элемент 5 подпружинен пружиной 6 относительно корпуса привода вращательного движения. Нижняя часть пальцев выполнена в виде наконечников. При опускании захватного устройства на деталь 9 пальцы 8, попавшие на деталь, утапливаются, а остальные располагаются по ее периметру. При включении привода 2 эксцентрик 4 начинает вращаться, при этом часть пальцев 8 соскальзывает с детали, деталь 9 зажимается выгнутыми пальцами 8. 4 ил.
sv-.з:
| Захватное устройство | 1978 |
|
SU712364A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
