Изобретение относится к робототехнике, в частности, к центрирую- щим захватным устройствам манипуляторов. :
Целью изобретения является расши- рение функциональных возможностей центрирующего захватного устройства путем повышения точности базирования изделия при его захвате.
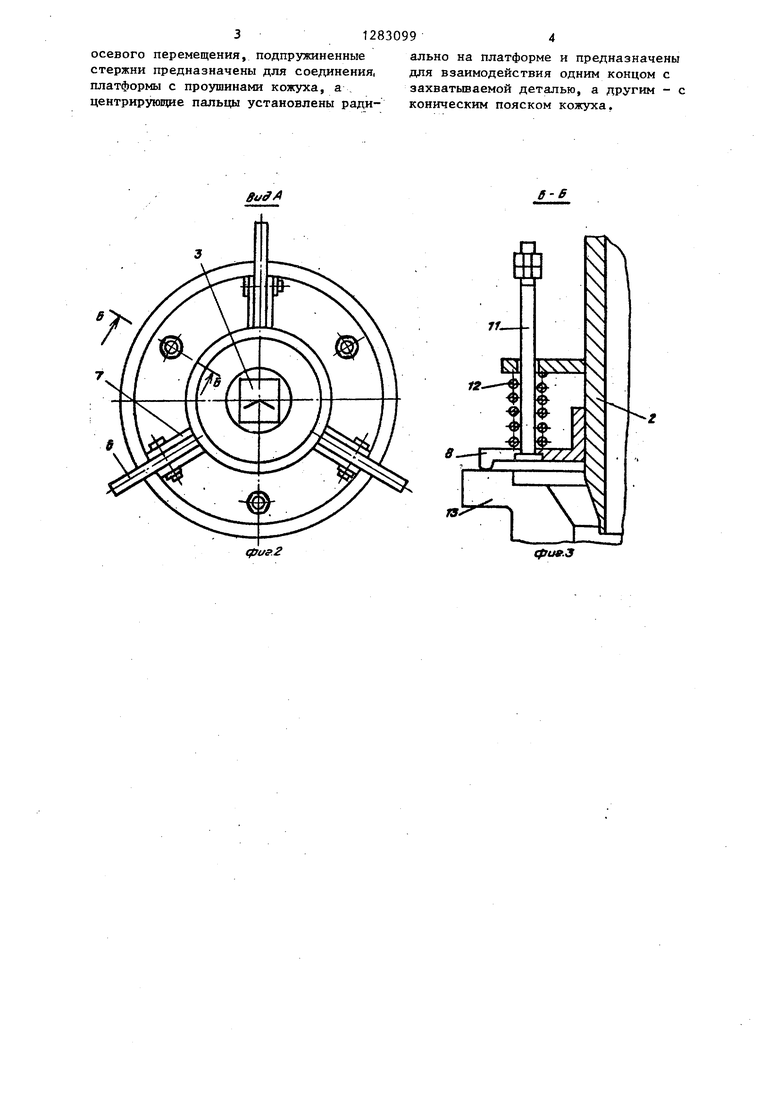
На фиг. 1-изображено предлагае- мое центрирующее захватное устройство; на фиг, 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - узел 1 на фиг. 1.
Центрирующее захватное устройство крепится -к корпусу 1 и состоит из ци цилиндрического кожуха 2 с укрепленным на нем- гидро- или пневмоцилинд- ром 3. Цилиндрический кожух в нижней части заканчивается центрирующим ко- :нусом. К штоку гидроцилиндра присоединена серьга 4, соединенная с рыча- гами 5, Рычаги шарнирно связаны с захватами б, установленными в кронштейнах 7 кожуха 2. На кожухе 2 с возможностью перемещения вдоль его оси расположена подпружиненная платформа. 8, в пазах которой по окружности установлены центрирующие пальцы 9 со сферическими концами, пахо- дящимися в контакте с конусом кожуха 2 и пружины 10, Подпружиненная плат- ;Щорма подвижно соединена стержнями 11 с проуишнами кожуха 2, а стержни пор 1ружинены пружинами 12. .
Захватное устройство работает следующим образом. ..- -.
Б исходном положении центрирующее захватное устройство расположено над захватьшаемым изделием 13, шток гид- роцилиндра выдвинут, захваты повернуты так, что изделие 13 свободно проходит между ними. Подпружиненная платформа под действием пружин 12 на находится в крайнем нижнем положении центрирующие пальцы пружинами 10 прижаты к конусу по его меньшему диаметру, что позволяет им свободно ВХОДИТЬ в отверстие захватываемого изделия. .
При опускании рукой манипулятора центрирующего захватного устройства подпружиненная платформа 8 опускаетс до соприкосновения с верхним торцом захватьшаемого изделия и останавливается. При дальнейшем опускании устройства, конус кожуха 2 скользит по сферическому концу пальца 9, пальць раздвигаются до соприкосновения хотя бы одного из них с внутренней поверхностью захватываемого изделия и при дальнейшем движении сдвигают изделие по опорной гладкой поверхности до тех пор,, пока центрирующие пальцы 9 не раздвинутся до наибольшего максимального размера, соответствующего внутреннему диаметру изделия 13. При этом захватьшаемое изделие 13 устанавливается соосно центрирующему захватному устройству.
После центрирования захватываемого изделия опускание захватного устройства прекращается и гидроцилиндр зажима переключается на стягивание штока. При втягивании штока рычаги поворачивают захваты, опорные поверхности которых подходят снизу к поверхности изделия 13, обеспечивая на дежное его крепление.
При подъеме захвата с изделием 13 пружины 12 платформы 8 постоянно прижимают ее к поверхности изделия и положение изделия относительно подпружиненной платформы 8 и центрирующих пальцев 9 не изменяется.
При выдвижении штока гидроцилиндра 3 рычаги 5 опускаются, поворачивают захваты 6 в исходное положение и высвобождают изделие 13. .
При подъеме захватного устройства кожух 2 захвата, поднимаясь, увлекае за собой подпружиненную платформу 8, конус кожуха 2 скользит по центрирующим пальцам 9; пружины 10 прижимают центрирующие пальцы 9 к нижне части конуса и все элементы захватного устройства свободно выходят из захватываемого изделия 13. Затем ;цикл работ повторяется.
:Формула изобретения
t
Центрирующее захватное устройство ;содержащее корпус, захватывающие деталь органы, посредством рычагов свя свйзанные с приводом, о т л и ч а ю- щ е е с я . тем, что, с целью расширения функциональных возможностей путем повьш1ения точности базирования захватьшаемой детали, устройство снабжено Цилиндрическим с проушинами, на конце которого вьтол- нен конический поясок, и платформой .с подпружиненными стержнями и центрирующими пальцами, при этом платформа расположена на кожухе с возможностью
осевого перемещения, подпружиненные стержни предназначены для соединения, платформы с проушинами кожуха, а центрирующие пальцы установлены радиВи А
ально на платформе и предназначены для взаимодействия одним концом с захватьшаемой деталью, а другим - с коническим пояском кожуха.
б-В
(риг2
фи.3
CpUff.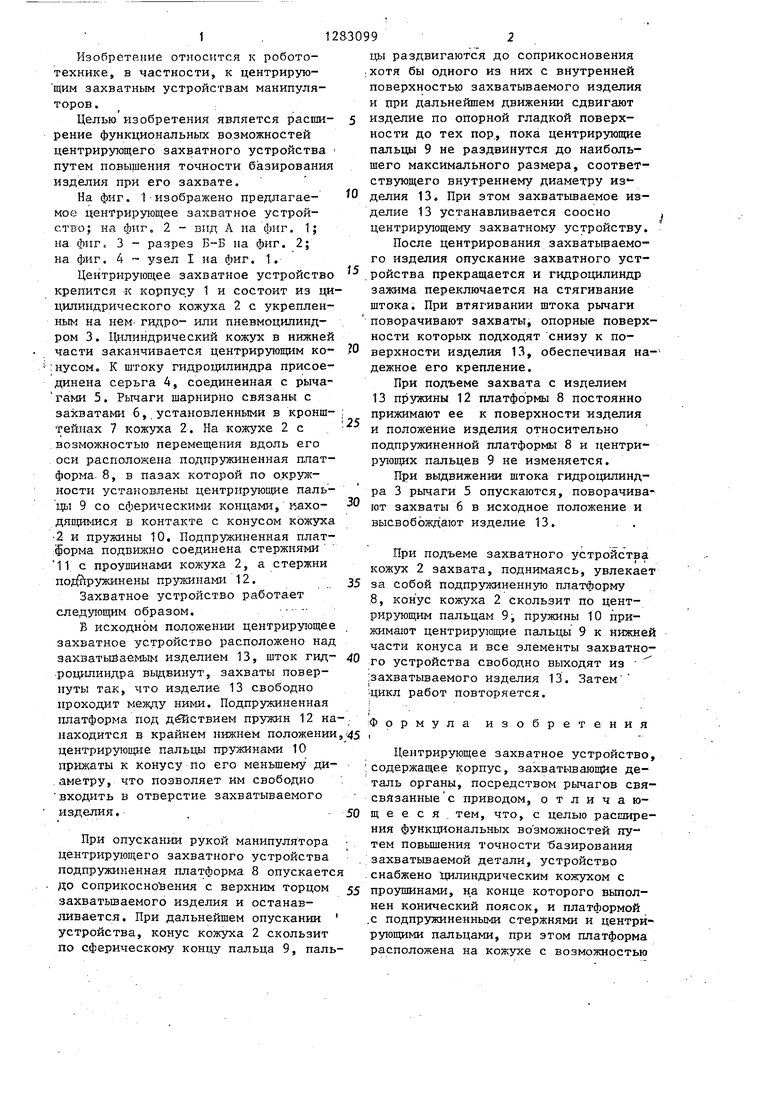
| название | год | авторы | номер документа |
|---|---|---|---|
| Центрирующее захватное устройство | 1985 |
|
SU1284757A1 |
| Схват робота | 1990 |
|
SU1761463A1 |
| Захват манипулятора | 1987 |
|
SU1451001A1 |
| Магнитно-вакуумный захват | 1985 |
|
SU1366396A1 |
| Устройство для автоматической смены инструмента | 1983 |
|
SU1135593A1 |
| Устройство для транспортировки и установки раструбного стержня в центробежную форму | 1976 |
|
SU598548A3 |
| Групповой схват | 1986 |
|
SU1333576A1 |
| Мобильный монтажный комплекс для сборно-разборных трубопроводов с раструбными соединениями труб | 2024 |
|
RU2841447C1 |
| Поворотно-делительный стол многопозиционного станка | 1986 |
|
SU1342673A1 |
| Устройство для автоматической смены инструмента и инструментальных головок на металлорежущем станке | 1987 |
|
SU1481026A1 |
Изобретение относится к робототехнике, в частности к центрирзтащим захватным устройствам манипуляторов, и позволяет расширить функциональные , возможности центрирующего захватного устройства. Устройство содержит корпус 1 и цилиндрический кожух 2 с коническим пояском в нижнем конце. Подпружиненная платформа подвижно соединена стержнями с кожухом 2, при, при ЭТОМ- на стержнях установлены пружины. Центрирование захватываемой , детали происходит пальцами 9, установленными в платформе с возможностью взаимодействия с коническим пояском {сожуха 2, 4 ил. (Л ND СХ
Редактор К, Волощук
Составитель К. Лопацинский
Техред Л.Сердюкова Корректор М. Максимишинец
Заказ 7344/14 . Тираж 949 Подписное ВНИИГШ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Захват манипулятора | 1979 |
|
SU812567A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
