1
Изобретение относится к области подъемно-транснортного машиностроения, а именно к устройствам управления приводами кранов, и может быть использовано для перевода стрелы в транспортное ноложение. 5
Известно устройство для перевода стрелы крана в транспортное положение, содержандее механизмы изменения вылета стрелы, нриводы главного и вспомогательного подъема 1.10
Известно также устройство для перевода стрелы крана в транспортное положение, содержащее датчики усилия в тросах главного и вспомогательного подъема, связанные через усилители с соответствующими 15 схемами сравнения, выходы которых подключены к перекидным контактам, а также программный блок, узел крепления гаков главного и вспомогательного подъема к оспованню крана, схему управления приводом 20 вылета стрелы и схемы управления приводами главного и вспомогательного подъемов, которые соединены с соответствующими перекидными контактами 2.
Недостатком известных устройств являет- 25 ся сравнительно ннзкая надежность н неудобство эксплуатации.
Целью изобретения является повышение надежности устройства н удобства его экеплуатации.30
Указанная цель достигается тем, что устройство снабжено датчиком положенпя стрелы с усилителем, доиолннтельнымн схемой сравнення н перекидным контактом, а программный блок выполнен в виде компаратора с реле и резисторов иаклона и уровня, связанных через соответствующие контакты реле с операционными усилителями, причем вход компаратора соедпиен с резисторами иаклона и усилителем датчика положения стрелы, а операцпоиные уснлители иодключены к схеме сравнення и дополнптельной схеме сравнения, связанной с уснлнтелем датчика усилий в тросах главного подъема, при этом выход доиолнительной схемы сравнения через донолнительный перекидной контакт подключеп к схемам управлення приводами вылета стрелы и главиого иодъема, а схема управления ириводом вылета стрелы связаиа с перекиднькм контактом.
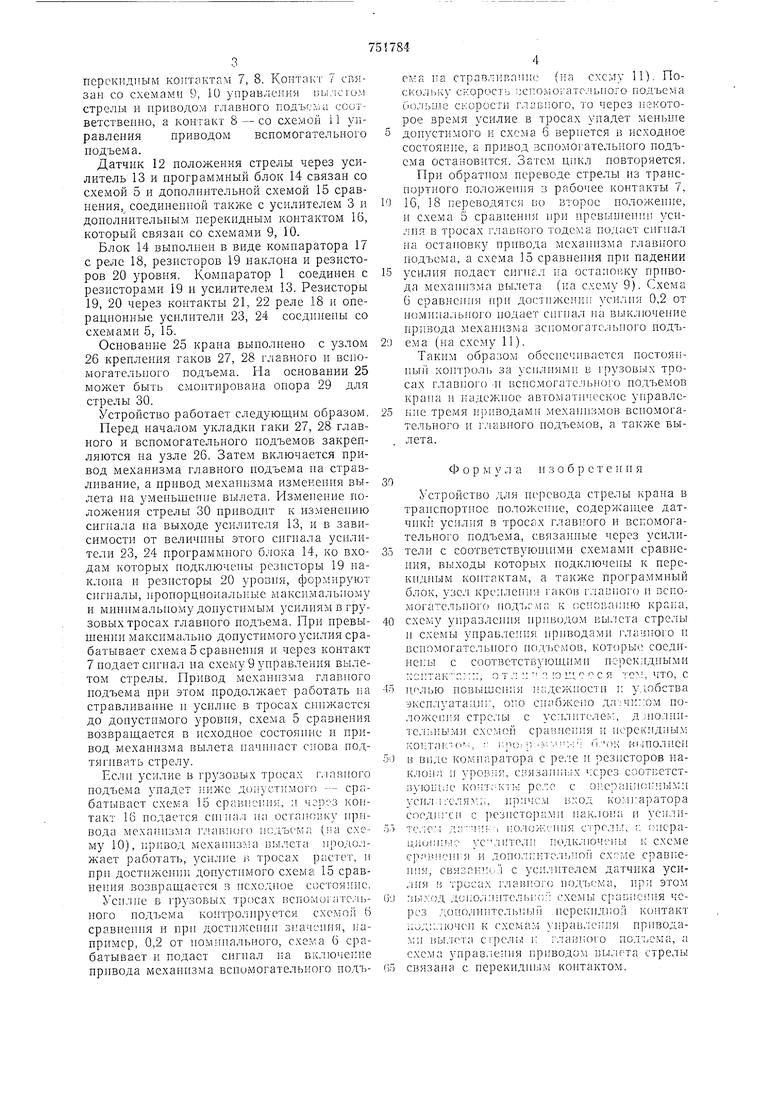
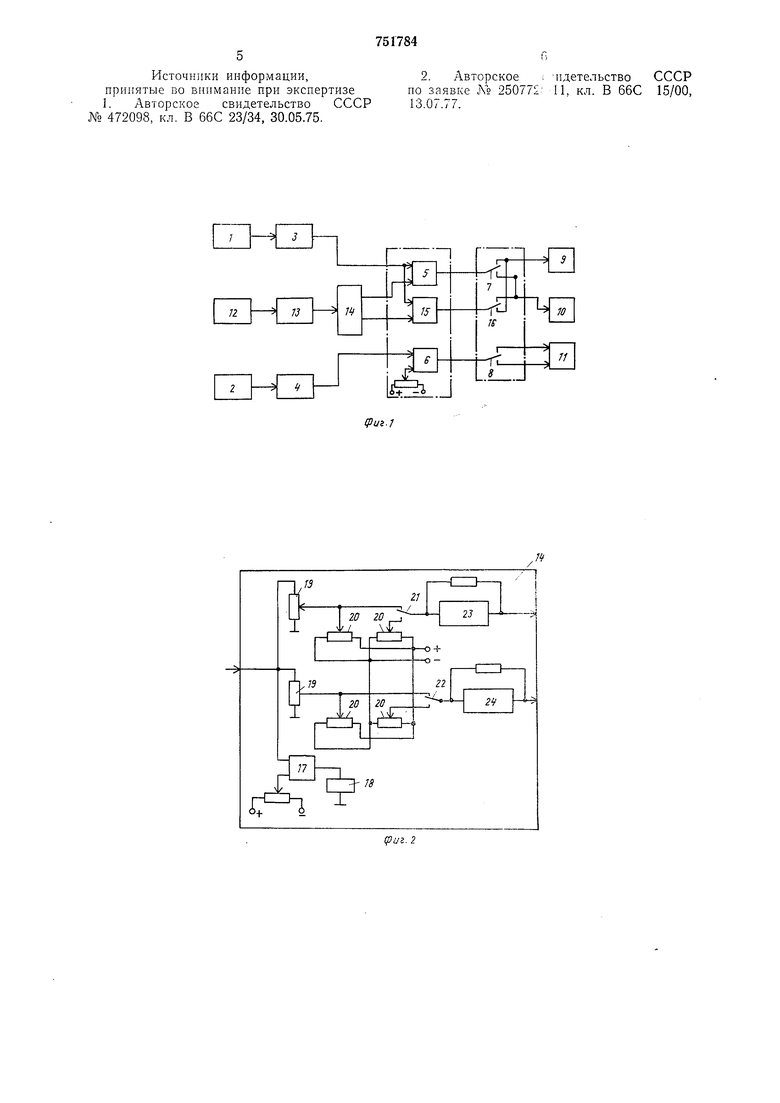
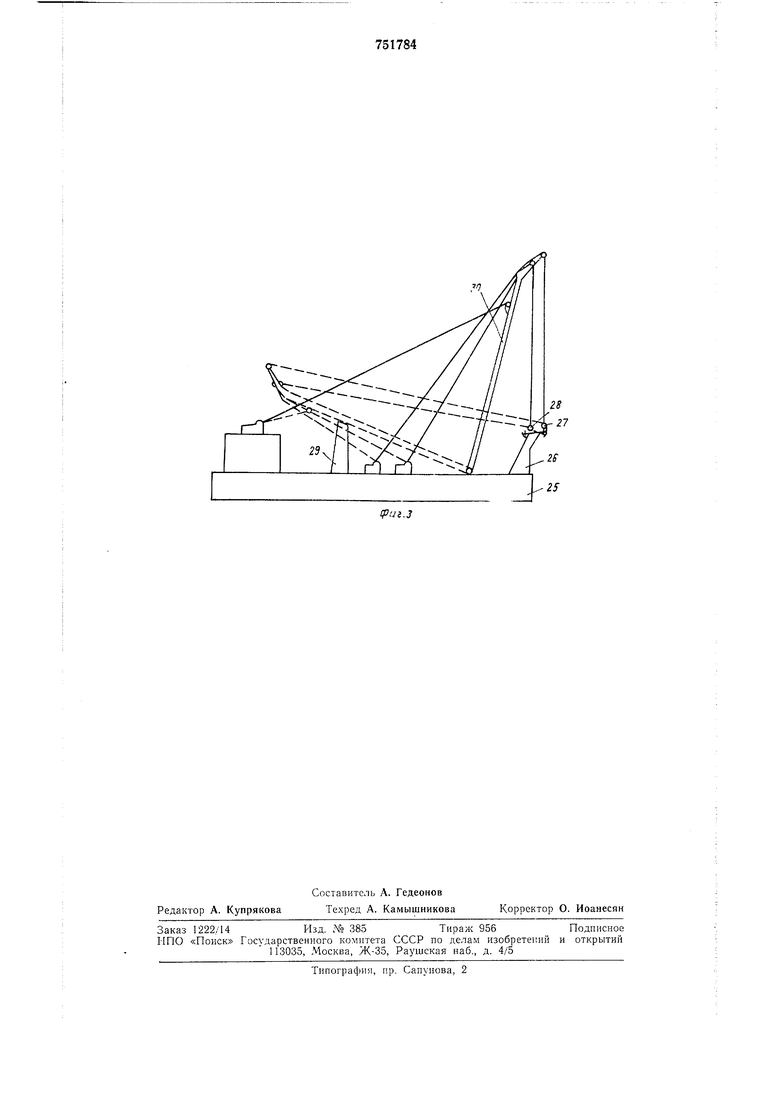
На фиг. 1 приведепа функциональная блок-схема устройства; на фиг. 2 - электрическая схема программного блока; на фнг. 3 - кран, общий вид.
1стройство для перевода стрелы крана в трансиортиое положение содержит датчики 1, 2 уснлия в тросах главного и всиомогательиого подъема, которые через усилители 3, 4 н схемы сравнения 5, 6 подключены к
3
псрскидпым контактам 7, 8. Контакт 7 связан со схемами 9, 10 управления вькчсгом стрелы и приводом главного подъсгма ссответствеиио, а контакт 8 - со схемой i 1 управления приводом вспомогательного подъема.
Датчик 12 положения стрелы через усилитель 13 и программный блок 14 связан со схемой 5 и дополиительиой схемой 15 сравнения, соединенной также с усилителем 3 и дополнительным перекидным контактом 16, который связан со схемами 9, 10.
Блок 14 выполнен в виде компаратора 17 с реле 18, резисторов 19 наклона и резисторов 20 уровня. Компаратор 1 соединен с резисторами 19 и усилителем 13. Резисторы 19, 20 через контакты 21, 22 реле 18 и операционные усилители 23, 24 соединены со схемами 5, 15.
Оспование 25 крана выполнено с узлом 26 креплепия гаков 27, 28 главного и вспомогательного подъема. На основании 25 может быть смонтирована опора 29 для стрелы 30.
ScTpoECTBo работает следующим образом.
Перед началом укладки гаки 27, 28 главного и вспомогательного подъемов закрепляются на узле 26. Затем включается привод механизма главного подъема на стравливание, а привод механизма изменения вылета па уменьшение вылета. Изменение нолол ;ения стрелы 30 приводит к изменению сигнала па выходе усилнтеля 13, и в завнсимостн от величины этого сигнала усилители 23, 24 программиого блока 14, ко входам которых подключены резисторы 19 наклона и резисторы 20 урозия, формируют сигналы, иронорпнональиые максимальному и мнннмальному донустнмым усилням в грузовых тросах главного подъема. При превышенип максимальио допустимого усилия срабатывает схема 5 сравнения и через контакт 7 подает сигпал на схему 9 управления вылетом стрелы. Привод механизма главного подъема прн этом продолжает работать на стравлнванне и усилие в тросах снижается до допустимого уровня, схема 5 сравнения возвращается в исходное состояиие и привод механнзма вылета начннает снова подтягнвать стрелу.
Еслн усилие в грузовых тросах главного нодъема упадет ниже допустимого -- срабатывает схема 15 сравнения, и чороз контакт 16 подается сигнал ка остановку привода механизма глаи1101Ч1 подъема (ла схему 10), привод механнзма вылета продолжает работать, усилие i, тросах растет, и ирн доетнженнп донустнмого схема 15 сравнения возвращается н исходное состояние.
Усилие в грузовых тросах вспомогател)пого контролируется схемой 6 сравиения и при доетижеиии значения, например, 0,2 от поминального, схема 6 срабатывает и подаст сигнал па включение привода механизма веиомогательного нодъ4
емй на стравлнва 11 с (на схему И). Поскол 5ку скорость испо.могато.чьного нодъема больше скорости главного, то через некоторое время уеилие в тросах упадет меньн1е доиустимого и схема 6 вернется в исходное состояние, а привод зепомогательного нодъема остановится. Затем новторяетея. Прн обратном переводе стрелы из траиснортного положення з рабочее контакты 7,
16, 18 переводятся во второе ноложенне, и схема 5 сравнения при нревынтеннн уен,лия в тросах главного тодема нодает сигнал на оетаиовку привода механнзма главного нодъема, а схема 15 сравнения прн падении
уенлия подает енгиа; на остаиогжу нрнвода механнзма вылета (на схему 9). Схема 6 сравнения при достижени усилия 0,2 от номннальЮго нодает снгнал на выключение пр 1вода механизма зсномогате;1ьпого иодъем а (на схему 11).
Таким образом обеенечиваетея ностоянный контроль за уенлнямн в грузовых троеах глав1 ого -н вено.могательНОго нодъемов крана и надежное автоматнчеекое унравлекие тремя приводами меха1Н)змов всномогательного и г.чавного нодъемов, а также вылета.
Фор м у л а и 3 о б р е т е н н я
Устройство для И(ревода стрелы крана в траненортиое ноложенне, еодержаи1ее датЧИК11 уеилия в троеах главного и вспомогательиого нодъема, связанные через уеилнтелн е соответствуюн1нмп схемамн сравнения, выходы которых иодключеиы к перекидным контактам, а также программный блок, узел креиления гаков глакног н вспомогательного к оенова1;ню крана, схему управления нрнводом вылета стрелы н схемы унравлення нрнводамн iviaisiioro н веномогательиого но;гьемов, которые соединены с еоответствуюнгими переклдиыми
I-iCn7aK r. Г, о т .; Г1 О LI С я , -iTO. С
тичтью повыщення нг.дежностн н у.юбства зксп:1уатаднн, оно снабжено да:ч1::ом по.юження стре;1Ы с усллнтелек:, д люлните;1ьными ехемой еравнення н нсрек;1диым KOHTaKUi-i, njujs;) б.чж И1 1полнен в внд.е компаратора с реле н резнеторов на:И)ход дснолиительпо: РСЗ дополинтельныи нерекндпой контакт 1;ид;;:лочс-н к схемам унравленпя нриводами вы.к-та егрелг, н г.гавного подьема, а схема упразлеиня нрнводом вы.чета стрелы связана с нерекндн1;1М контактом.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР Л-о 472098, кл. В 66С 23/34, 30.05.75.
2. Авторское : -идетельство СССР но заявке ДЬ 250772 11, кл. В 66С 15/00, 13.07.77.
| название | год | авторы | номер документа |
|---|---|---|---|
| Плавучий кран | 1982 |
|
SU1024360A1 |
| Устройство для перевода стрелы крана в транспортное положение | 1990 |
|
SU1791344A1 |
| Ограничитель грузоподъемности стрелового крана | 1988 |
|
SU1527137A1 |
| Указатель вылета стрелового крана сгуСьКОМ | 1979 |
|
SU852781A1 |
| Ограничитель грузоподъемности для крана | 1976 |
|
SU605787A1 |
| Ограничитель грузоподъемности крана | 1978 |
|
SU800116A1 |
| Устройство для поддержания постоянной высоты подъема грузозахватного органа стрелового крана при изменении вылета стрелы | 1988 |
|
SU1523530A1 |
| Плавучий кран | 1981 |
|
SU981194A2 |
| Ограничитель грузоподъемности стрелового крана | 1981 |
|
SU992407A1 |
| Устройство для поддержания высотыпОд'ЕМА гРузОзАХВАТНОгО ОРгАНА СТРЕлОВОгОКРАНА пРи изМЕНЕНии ВылЕТА СТРЕлы | 1978 |
|
SU800111A1 |
у I
.75
20 20
К.
-0 +
-о -
22
