Изобретение относится к электротехнике и может быть использовано для создания асинхронного электропривода производственныхмеханизмов например механизмов грузоподъемных машин. Известен двухдвигательный электро привод, содержащий два асинхронных двигателя, причем статор одного из двигателей, подключен к сети переменнрго тока, а статор второго двигателя подключен к сети постоянного тока, что реализуется с помощью соединенного с сетью переменного- тока выпрямителя и подключенного к его выходу резистора, величина которого подбирается исходя из обеспечения требуемой величины постоянного тока в цепи статора второго двигателя. Такая схема обеспечивает жесткую ме ханическую характеристику электропривода в области малых скоростей, что позволяет получить стабильного работу двигателя при малых скоростях в случае изменения нагрузки на вешу Недостаток этого электропривода заключается в повышенных потерях в обмотках двигателей при работе на ма Лых скоростях. Действительно, по обмоткам статора второго двигателя протекает постоянный ток, величину которого приходится выбирать достаточно большой для получения требуекых тормозных моментов, причем величина этого тока при изменениях нагрузки на валу (в том числе и в случае, когда нагрузка равна, нулю), поддерживается неизменной. Цель изобретения - уменьшение потерь энергии в электродвигателях. Поставленная цель достигается тем, что в двухдвигательный электропривод, содержащий два асинхронных электродвигателя с фазным ротором, статорная обАютка-первого из которых подключена к сети переменного тока, а два вывода статорной обмотки второго порознь подключены к одному из выводов резистора и выпрямителя,входом пр;;1слюченного к сети, переменного тока, дополнительно введен соединенный входом с роторной обмоткой первого электродвигателя выпрямитель, выход которого зашунтирован дополнительно введенным резистбром и соединен одним {ВЫВОДОМ с одноименным выводом первоГо выпрямителя, а другим - со вторым выводом основного резистора.
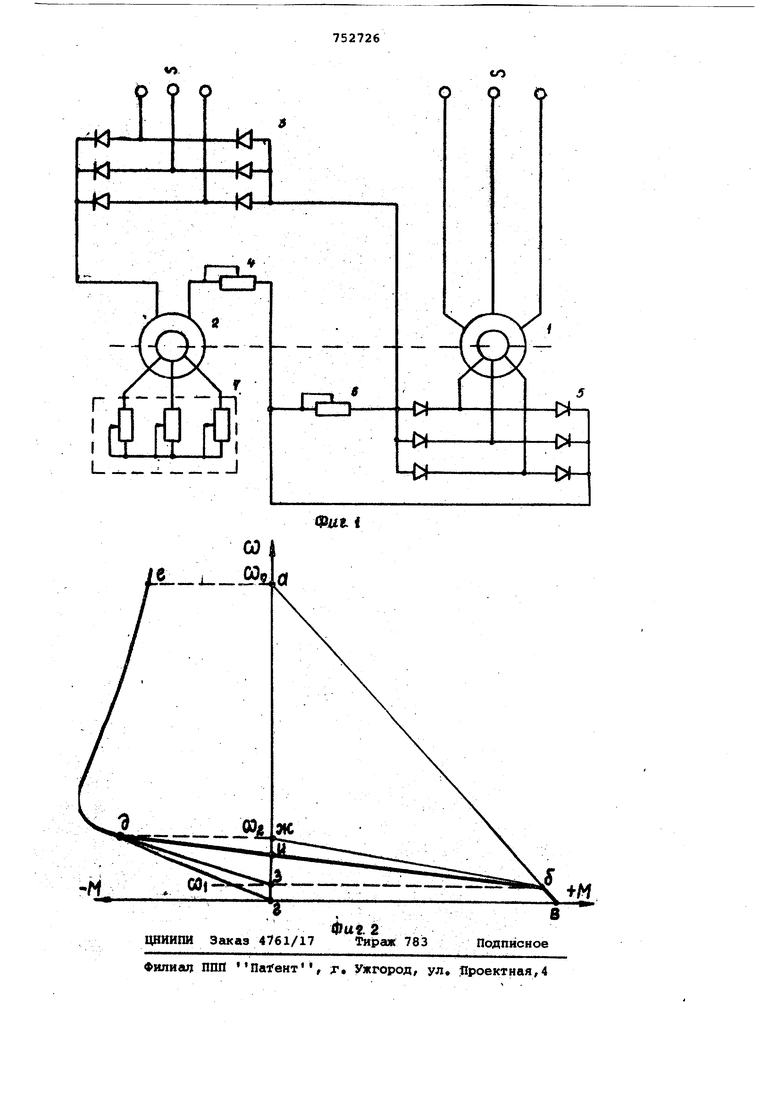
На фиг. 1 приведена схема устройства; нафиг. 2 - механические характеристики электропривода.
В устройстве, статор асинхронного двигателя 1 подключен к сети переменного тока,-а статор асинхронного двигателя 2 - к выходу выпрямителя 3 через последовательно соединенные резистор 4 и выход выпрямителя 5, параллельно которому включен резистор 6 Выходы выпрямителей 3 и 5 включены навстречу друг другу. Вход выпрямителя 3 соединен с сетью переменного тока, а вход выпрямителя 5 - с ротором двигателя 1. К ротору двигателя 2 присоединены резисторы 7.
На фиг. 2 приведены следующие механические характеристики: реостатная характеристика cxrfb для двигателя 1,соответствующая открытому выпрямителю 5 и закрытому выпрямителю 3, когда токи в статоре двигателя 2 равны нулю; характеристика динамического торможения для двигателя 2,. соответствующая открытому выпрямителю 3 и закрытому выпрямителю 5, когда токи в роторе двигателя равны нулю; характеристикаootccfe двигателя 1, получающаяся при работе его в схеме, приведенной на фиг. 1; характеристика гзсе двигателя 2, получающаяся при работе его в схеме, представленной на фиг. 1; результирующая характеристика eclucfS двухдвигательного электропривода для схемы, показанной на фиг. 1.
Устройство работает следующим . образом.
Уст эойство может работать в одном из трех режимов.
В первом режиме выпрямитель 3 закрыт, а выпрямитель 5 открыт. При этом момент двигателя 2 равен нулю, а двигатель 1 работает на реостатной характеристике oiff& .
Во втором режиме выпрямители 3 и 5 открыты, в третьем режиме выпрямитель 3 открыт, а выпрямитель 5 закрыт. В этом случае момент двигателя 1 равен нулю, а двигатель 2 работает на характеристике динамического торможения 1.9 в ,
Работа схемы в одном из трех указанных режимов определяется величинами напряжений и Dots на выходе выпрямителей 3 и 5 соответственно. При этом постоянно, aUplB Двигателя 1 возрастает с увеличением скольжения двигателя, поскольку,вход выпрямителя 3 подключен к сети с постоянным напряжением, а вход выпрямителя 5 --к ротору двигателя 1, напряжение которого возрастает с увеличением скольжения. Следовательно, режим работы схемы,показанной на фиг. 1 определяется величиной сколь
женин двигателя 1, т.е. скоростью вгипа электропривода.
Если скольжение двигателя 1 достаточно велико, то схема работает в первом режиме и ток в резисторе 6 протекает только от выпрямителя 5. Действительно, а таком случае выполняется неравенство
Ud Ud3 (1)
При этом выпрямитель 3 закрыт. Допустим,, что при скорости вала электропривода, равной нулю, схема, представленная на фиг. 1, работает в первом режиме. Тогда состояние двигателя 1 характеризуется точкой в на реостатной характеристике affft . При ув.еличении скорости вала электропривода скольжение двигателя 1 уменьшается, что определяет уменьшение напряжения, и при некоторой угловой скорости J вала величинаи з достигает величины UdljrT.e. имеет место равенство
Ud5-Udl3-(2)
Отсюда следует, что при изменении угловой скорости вала от нуля до си состояние двигателя 1 определяется участком &б характеристики об 6 , где точка cf соответствуетскоростиш а состояние двигателя 2, момент которого равен нулю, может быть определено отрезкомгэ на оси ординат, где г и 3 соответствуют нулевой скорости и скорости uj4 . При увеличении угловой скорости вала выше uj схема работает во втором из указанных режимов. В самом деле, поскольку при увеличении угловой скорости вала выше и ,1 скольжение двигателя 1 уменьшается, то при этом между напряженкяMHVJois и Uoi3 меет место неравенство Uds- UdIli , (3) противоположное по отношению к неравенству (1). При этом открывается выпрямитель 3, и так как выпрямители 5 и 3 оказываются открытыми, то по резистору 6 протекают токи Oois от выпрямителя 5 иОсз1зот выпрямителя 3, соответственно равные
..
(4)
dl5
(«,R,6
(5)
G13-R TW7
гдеЙ ,3 HRg - сопротивления обмоток статора двигателя 2 по которым протекает токЗбСхг сопротивления резисторов 4 и 6 соответственно.
Из выражений (4) и (5) следует, что при увеличении угловой скорости вала выше 1х(| (т.е.. .при уменьшении скольжения ДQ}iгaтeля 1) ток Doig уменьшается, а ток3(313 зрастает, .к как при уменьшении скольжения уменьшается напряжениеи; ;.ПРИ некоторой скорости Ша токТ)Л5Становится равным нулю, выпрямитель 5 закрывается,и момент двигателя 1 также становится равным нулю, В диапазоне скоростей отсоддосо механическая характеристика двигателя 1 изображается линией сГэс, где точ ка ж-точка на оси ординат, соответствующая скорости о) /1 , а механическая характеристика двигателя 2 изображается линией ЭС5 f где точка д-точка на характеристике i.qe динамического торможения двигателя 2, соответствующая скорости uJ . При угловой скорости вала, больше чеми; схема работает в третьем из указанных режимов. Действительно, при угловой скорости ш,, вала значение Dd(5 равно нулю. При этом числител в выражении (4) таюхе равен нулю. Так как при возрастании угловой скорости вала въаае UJ1 напряжение Uols падает, то ток согласно формуле (4) должен стать отрицательным, что невозможно из-за односторонней проводимости выпрямителя 5, следовательно при этом выпрямитель 5 закрыт. В этих условиях момент двигателя 1. вплоть до синхронной скорости (точка а на фиг. 2) равен нулю, и механическая характеристика этого двигателя может быть изображена отрезком жа на оси ординат. Двигатель 2 при этом работает в режиме динамического торможения (характеристика де на фиг. 2, где точка е соответствует большей чем tдJ, угловой скорости двигателя 2). Результирующий момент на валу эле тропривода определяется алгебраической суммой моментов двигателей 1 и 2 Участок cTug результирующей механической характеристики электропривода (где точка и соответствует моменту нагрузки, равному нулю) имеет высоку жесткость, что определяет стабильную работу эд1ектропривода в области малых его скоростей при изменении момента нагрузки в широких пределах. Устройство позволяет регулировать скорость вала электропривода, что осуществляется изменением величин сопротивлений 6,4 и 7, а также с помощью дополнительного трансформатора, включенного между сетью переменного тока и входом выпрямителя 3. Выпрямитель 3 может быть выполнен не только в виде трехфазного, но и в виде однофазного выпрямителя, а также с управляеквлми вентилями. Использование изобретения позволяет существенно уменьшить потери энергии в элект одвигателях, что дает возможность уменьшить габариты электродвигателей и соответственно маховой массы всего электропривода, что также приводит к уменьшению потерь энергии, или при тех же потерях получить больший двигательный и тормозной моменты электродвигателей по сравнению с изьестным устройством. Формула изобретения Двухдвигательный электропривод переменного тока, содержащий два асинхронных электродвигателя с фазным ротором, статорная обмотка первого из которых подключена к сети переменного тока, а два вывода статорной обмотки второго порознь подключены к одному из выводов резистора и выпрямителя, входом подключенного к сети переменного тока , отличающийся тем, что, с целью уменьшения потерь энергии в электродвигателях, в него введен соединенный входом с роторной обмоткой первого электродвигателя .выпрямитель, выход которого зашунтирован дополнительно введенным резистором и соединен одним выводом с одноименным выводом первого выпрямителя, а другим со вторым выводом основного резистора. Источники информации, принятые во внимание при экспертизе 1. Чиликин М.Г., Соколова М.М., Терехов В.М. и Шинямский А.В. Основы автоматизированного электропривода. Энергия , 1974, с.132.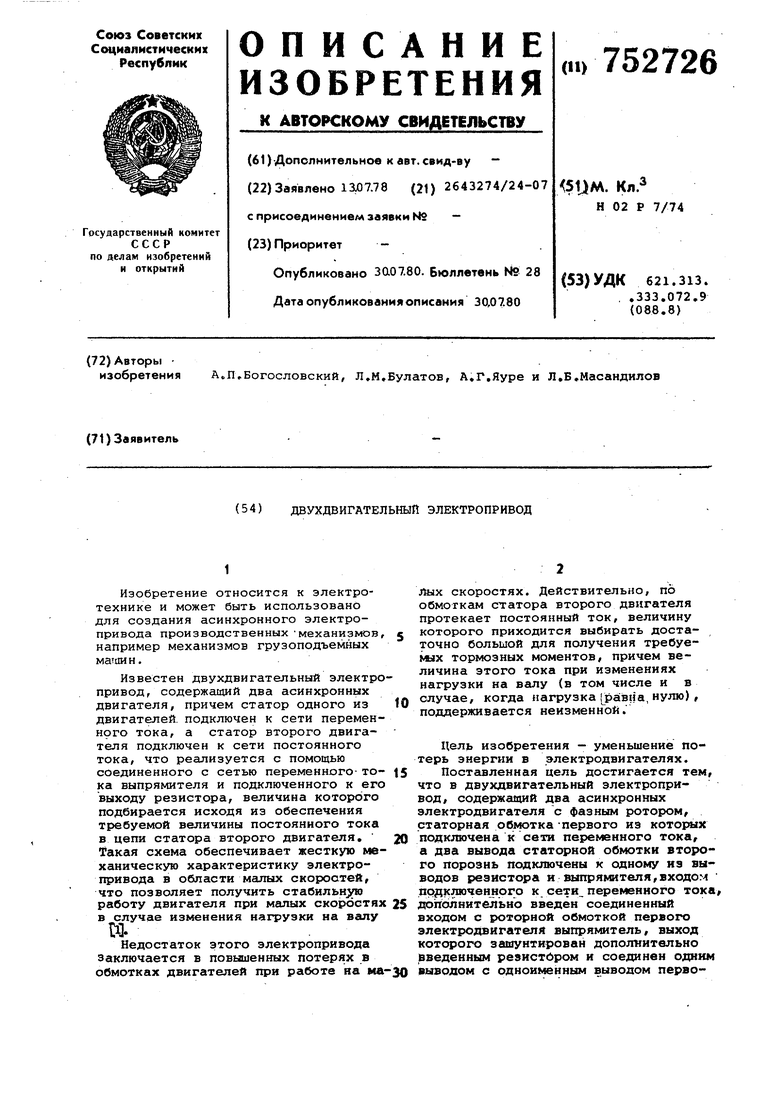
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухдвигательный электропривод | 1981 |
|
SU1012414A1 |
| КРАНОВЫЙ ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА ГРУЗА | 2007 |
|
RU2345945C1 |
| Двухдвигательный электропривод переменного тока | 1989 |
|
SU1690166A1 |
| Двухдвигательный регулируемый электропривод | 1979 |
|
SU879725A1 |
| ДВУХДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД | 2002 |
|
RU2237345C2 |
| Электропривод переменного тока | 1985 |
|
SU1272463A1 |
| Двухдвигательный электропривод | 1983 |
|
SU1270863A1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА И ОПУСКАНИЯ ГРУЗА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298520C2 |
| ДВУХДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД | 1999 |
|
RU2176848C2 |
| Тяговый электропривод | 2020 |
|
RU2751372C1 |