1
Изобретение относится к области автоматического регулирования, а именно, к двухканальным следящим системам, в которых одно из управляющих воздействий вырабатывается программным устройством и является приближенным.
Известны следящие системы, содержащие два канала с целью уменьщения вероятности срыва слежения при увеличении ошибки сопровождения 1.
Из известных систем наиболее близкой по технической сущности является двухканальная слепящая система 2, содержащая основной следящий привод, состоящий из последовательно соединенных элемента сравнения и сумматора, а также из последовательно соединенных блока управления исполнительным двигателем, исполнительного Двигателя и редуктора, выход которого подключен к объекту регулирования, и дополнительный привод, состоящий из эле-. мента сравнения, последовательно соединенных блока управления двигателем, двигате. ля и редуктора, выход которого соединен с вторым входом сумматора основного привода, а также тахогенератора, установленного
на валу двигателя дополнительного привода, причем первый вход элемента сравнения основного привода подключен к источнику программных значений измеряемого параметра, первый вход элемента сравнения дополнитель5 ного привода подключен к источнику истинных значений измеряемого параметра, а вторые входы элементов сравнения подключены к выходу редуктора основного привода.
В известной системе основной канал используется для отработки воздействий В i,
10 выр-абатываемых программным устройством и являющихся приближенным значением воздействия В г. При этом воспроизведение уп- равляющих воздействий производится «грубо. Дополнительный канал отрабатывает лищь разность управляющих воздействий,
задаваемых программно В( и измеряемых точной системой В г, что позволяет сделать его узкополосным и улучщить фильтрацию сигнала Вг. Тем самым дополнительный канал обеспечивает «точное воспроизведение
20 объектом регулирования задающего воздействия В г, измеряемого точной системой.
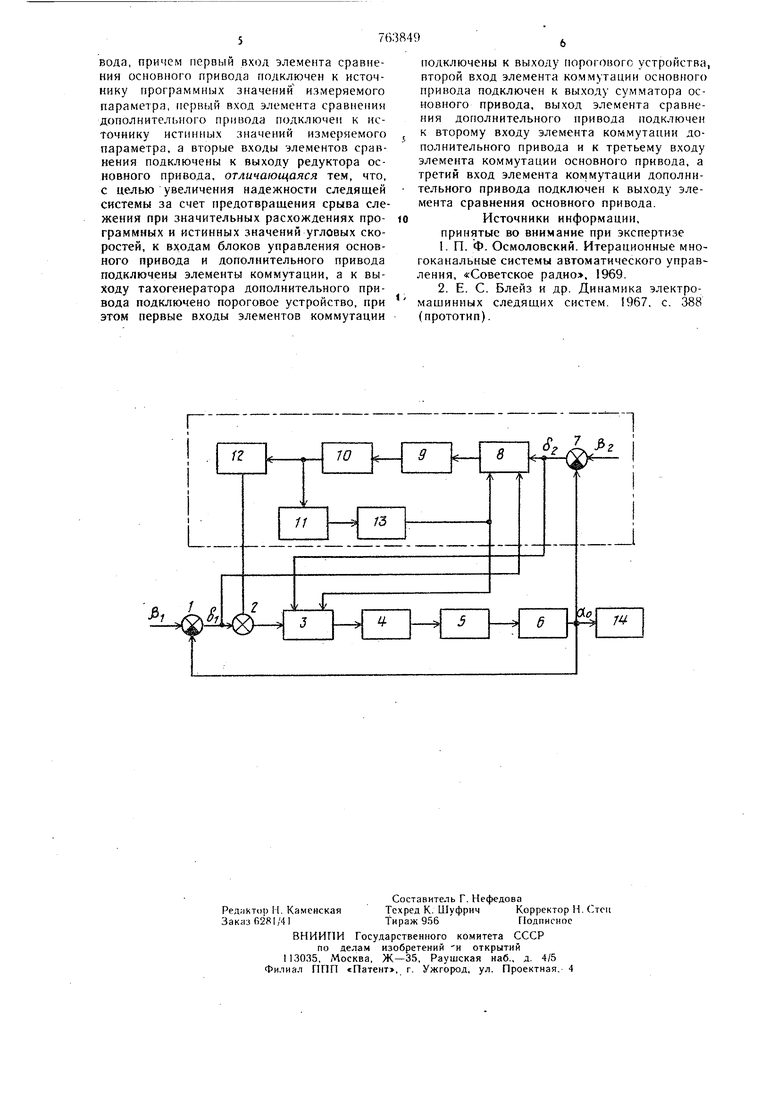
Однако использование известной системы с узкополо( дополнительным приводом возможно только при определенной велнчиlie расхождения программных и истинных значений. Это ограничивает область применения известной двухканальной системы. Целью изобретения является увеличение надежности системы за счет предотвращения срывов слежения при значительных расхожде ниях программных и истинных значений угловых скоростей. Поставленная цель достигается тем, что в предлагаемой системе к входам блоков управления основного привода и дополнительного привода подключаются элементы коммутации, а к выходу тахогенератора дополнительного привода подключается пороговое устройство, при этом первые входы элементов коммутации подключены к выходу порогового устройства, второй вход элемента коммутации основного привода подключен к выходу сумматора.основного привода, выход элемента сравнения дополнительного привода подключен к второму входу элемента коммутации дополнительного привода и к третьему входу элемента коммутации основного привода, а третий вход элемента коммутации дополнительного привода подключен к выходу элемента сравнения основного привода. На чертеже представлена структурная схема двухканальной следящей системы, где обозначено: do - выходная координата двухкакальной следящей системы, 1 - управляющее воздействие- задаваемое программно, г-управляющее воздействие (истинное значение), 5, и §j- сигналы рассогласования основного и дополнительного каналов. Двухка 1альная следящая система содержит основной следящий привод, состоящий из элемента сравнения 1, сумматора 2, элемен та коммутации 3, блока управления 4 исполнительным двигателем, исполнительного двигателя 5, редуктора 6, дополнительный привод, состоящий из элемента сравнения 7, элемента коммутации 8, блока управления 9 двигателем, двигателя 10, редуктора 12, тахогенератора 1, порогового устройства 13 и объект управления 14. Двухканальная следящая система работает следующим образом. Сигнал рассогласования i с выхода элемента сравнения 7, пропорциональный величине .г- , поступает через элемент коммутации 8, блок управления 9 на двигатель 10, который через механический редуктор 2 воздействует на второй вход сумматора 2. Сигнал рассогласования Si , с выхода элемента сравнения 1, пропорциональный величине fit - do, поступает на первый вход сумматора 2. Суммарный сигнал с выхода сумматора 2 передается через элемент коммутации 3, блок управления 4 на исполнительный двигатель 5, который через механический редуктор 6 устанавливает выходную ось на угол do. При этом рассогласование 5 j9i- oto сводится к минимальной величине, в. чем и состоит задача двухканальмой системы. Напряжение с выхода тахогенератора 11, пропорциональное скорости двигателя дополнительного привода 10, а значит разница программных и истинных значений угловых скоростей, поступает на вход порогового устройства 13. С увеличением расхождения между программными и истинными значениями напряжение на выходе тахогенератора растет и при достижении определенного значения происходит срабатывание порогового устройства - вырабатывается команда на переключение элементов коммутации. Элемент коммутации3 отключает от-входа блока управления 4 сигнал с выхода сумматора 2 и подключает сигнал рассогласования 5. Элемент коммутации 8 отключает от входа блока управления 9 сигнала рассогласования г. и подключает сигнал рассогласования 5,. Истинное значение измеряемого параметра 1 отраба-тывается основным следящим приводом. Дополнительный привод работает от сигнала 5, , который после коммутации отражает разницу между программным значением параметра j8i, и истинным значением /г, отработанным основным приводо.м. Поэтому сигнал тахогенератора после коммутации пропорционален разнице программных и истинных значений угловых скоростей, что обеспечивает функционирование порогового устройства и возможность возврата к исходной схеме работы при уменьшении указанной разницы. , Использование в двухканальной системе порогового устройства, срабатывающего по сигналу тахогенератора дополнительного привода и вырабатывающ.его команду на переключение элементов коммутации, которые подключены к входам блоков управления, предотвращает срыв слежения при расхождениях программных и истинных значений угловых скоростей, приводящих к увеличению ошибки слежения. Это повышает надежность системы и снижает требования к точности выработки программных значений. Формула изобретения Двухканальная следящая система, содержащая основной следящий привод, состоящий из последовательно соединенных элемента сравнения и сумматора, а также из последовательно соединенных блока управления исполнительным двигателем, исполнительного двигателя и редуктора, выход которого подключен к объекту регулирования, и дополнительный привод, состоящий из Элемента сравнения, последовательно, соединенных блока управления двигателем, двТ гателя и редуктора, выход которого соединен с вторым входом сумматора основного привода, а также тахогенератора, установленного на валу двигателя дополнительного при
вода, причем первый вход элемента сравнения основного привода подключен к источнику программных значении измеряемого параметра, нервый вход элемента сравнении дополнительного привода подключен к источнику истинных значений измеряемого параметра, а вторые входы элементов сравнения подключены к выходу редуктора основного привода, отличающаяся тем, что, с целью увеличения надежности следящей системы за счет предотвращения срыва слежения при значительных расхождениях программных и истинных значений угловых скоростей, к входам блоков управления основного привода и дополнительного привода подключены элементы коммутации, а к выходу тахогенератора дополнительного привода подключено пороговое устройство, при этом первые входы элементов коммутации
подключены к выходу порогового устройства, второй вход элемента коммутации основного привода подключен к выходу сумматора основного привода, выход элемента сравнения дополнительного привода подключен к второму входу элемента коммутации дополнительного привода и к третьему входу элемента коммутации основного привода, а третий вход элемента коммутации дополнительного привода подключен к выходу элемента сравнения основного привода.
Источники информации, принятые во внимание при экспертизе . П. Ф. Осмоловский. Итерационные многоканальные системы автоматического управления, «Советское радно, 1969.
2. Е. С. Блейз и др. Динамика электромашинных следящих систем. 1967, с. 388 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1980 |
|
SU885970A1 |
| Следящая система | 1978 |
|
SU746406A1 |
| Следящая система | 1986 |
|
SU1401436A2 |
| Следящий привод для компенсации ки-НЕМАТичЕСКиХ пОгРЕшНОСТЕй МЕХАНизМОВ | 1979 |
|
SU817959A1 |
| Следящая система | 1988 |
|
SU1524021A1 |
| Следящая система | 1978 |
|
SU746408A1 |
| Двухканальная следящая система с разделенной нагрузкой | 1975 |
|
SU553590A1 |
| Двухканальная следящая система | 1973 |
|
SU446027A1 |
| Следящий электропривод | 1980 |
|
SU903804A1 |
| Устройство для отработки заданногоположения регулирующего органа | 1973 |
|
SU508779A1 |
г
1
