1
Изобретение относится к манипуляторам, имеющим средства для уравновешивания руки и может быть использовано, например в манипуляторах, обу- g чаемых посредством ручного перемещения рабочего органа по требуемой траектории.
Известен промышленный робот, содержащий основание и механическую Q руку, состоящую из шарнирно сочлененных звеньев 1 .
Недостатком известного манипулятора является недостаточная точность уравновешивания и, вследствие наличия 15 систем управления давлением, усложнение конструкции.
Цель изобретения - упрощение конструкции и повьашение точности уравновешивания.20
Поставленная цель достигается тем, что направляющие каретки расположены на поворотном столе, силовой цилиндр жестко закреплен на каретке в вертикальном положении, шарнирно соединен 25 с механической рукой и снабжен источником постоянного давления.
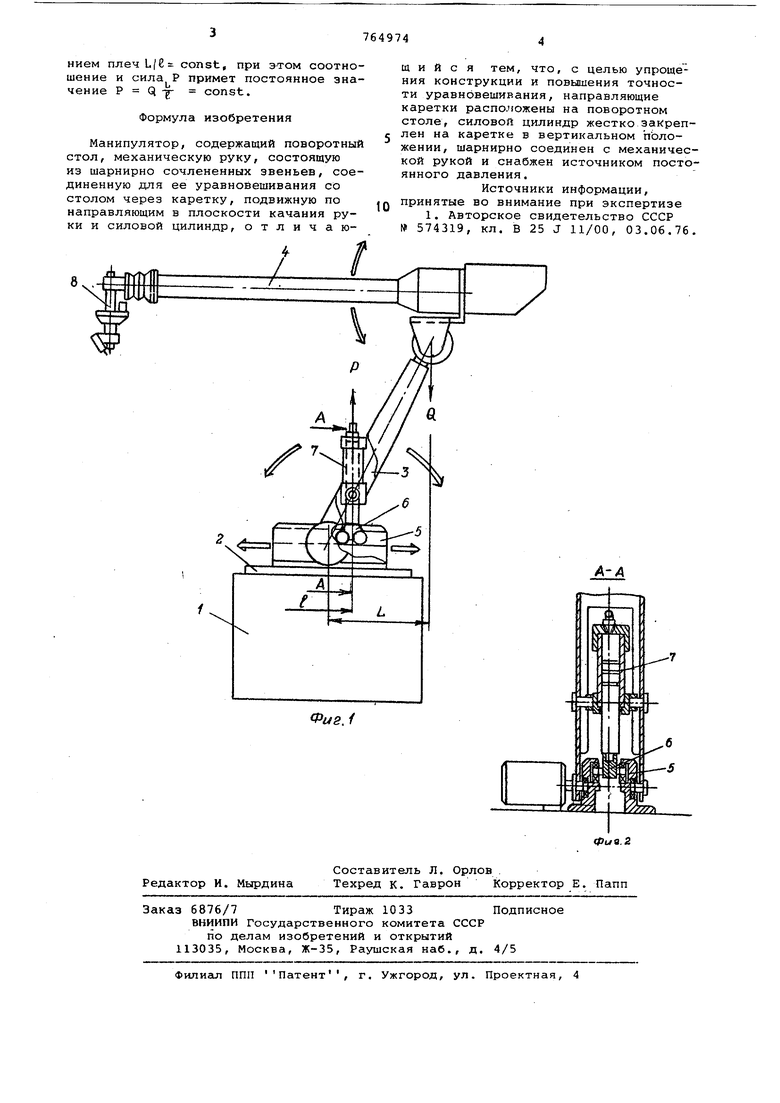
На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - разрез А-А на фиг. 1.
(54) МАНИПУЛЯТОР
Манипулятор состоит из основания 1 с поворотньзм столом 2, на котором щарнирно закреплен рычаг 3 руки 4 манипулятора. На столе выполнены направляющие 5, в которых перемещается катерка 6, несущая вертикальный силовой цилиндр 7, корпус которого щарнирно соединен с рычагом 3 руки 4. Силовой цилиндр подключен к системе постоянного давления (не показана).
С помощью установленных в сочленениях руки приводов (не показаны), а в режиме обучения - вручную, за рабочий орган 8, например за сварочную головку, осуществляют перемещение рабочего органа по требуемой траектории. Рычаг 3 при этом принимает различные угловые положения, каретка 6 перемещается по направляющим 5. В любом положении рычага 3 обеспечивается постоянное отношение расстояний и Ь , которые являются плечами действия силы Р (уравновешивающей) и q (вес руки) соответственно.
При постоянном весе руки, что характерно для манипуляторов применяемых для сварки, окраски и т.п. работ, точное уравновешивание руки обеспечивается постоянной силой и отноше
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1981 |
|
SU971645A2 |
| Манипулятор | 1982 |
|
SU1007967A1 |
| Уравновешенный манипулятор | 1981 |
|
SU1000271A1 |
| Манипулятор | 1984 |
|
SU1247264A1 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ МИНИМАЛЬНЫХ ИНВАЗИВНЫХ ВМЕШАТЕЛЬСТВ | 2007 |
|
RU2412800C2 |
| МЕДИЦИНСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА | 2007 |
|
RU2412799C2 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
| Манипулятор | 1986 |
|
SU1454687A1 |
| Манипулятор | 1982 |
|
SU1045992A1 |
| Уравновешивающий подъемник | 1981 |
|
SU988751A1 |
