1
Изобретение относится к подъемнотранспортному машиностроению, а именно к гравитационным роликовым конвейерам.5
Известны гравитационные роликовые конвейеры, в которых для обеспечения регулирования скорости перемещения грузов используются тормозные ролики, каждый из которых снабжен демпфирую- |Q щим устройством {1} .
Однако такие конвейеры имеют сложную конструкцию.
Известен также гравитационный роликовый конвейер со спиральной трассой, содержащий опорные ролики, оси кото- рых установлены в спиральных опорах, смонтированных на раме 2.
Однако в таких конвейерах со спиральной трассой не обеспечивается 20 бесступенчатое регулирование скорости перемещения груза по всей длине конвейера.
Цель изобретения - упрощение кон- 25 струкции гравитационного роликового конвейера со спиральной трассой и обеспечение бесступенчатого регулирования скорости перемещения груза по всей длине конвейера.30
Это достигается тем, что конвейер снабжен установленными в раме подпятниками с закрепленными на них зажимными элементами, в которых установлены с возможностью перемещения вдбль направления движения груза спиральные опоры, при этом подпятники установлены с возможностью перемещения по высоте и фиксации на заданном уровне.
Подпятники мбгут быть выполнены в виде винтов.
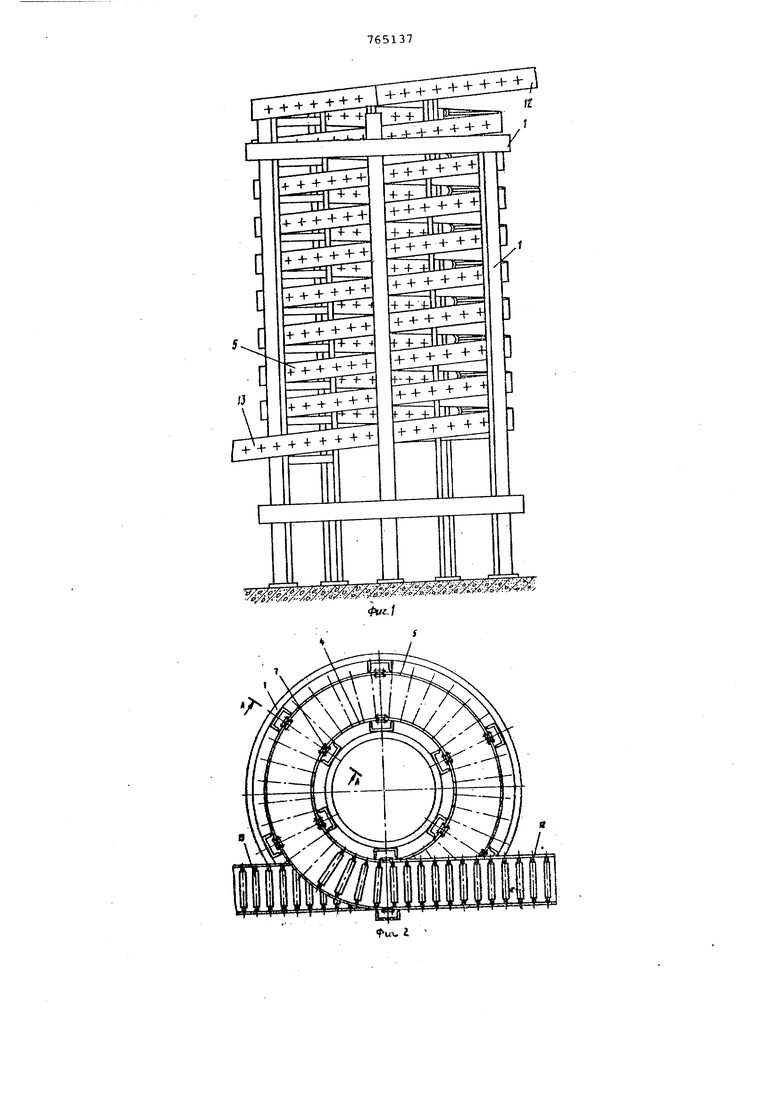
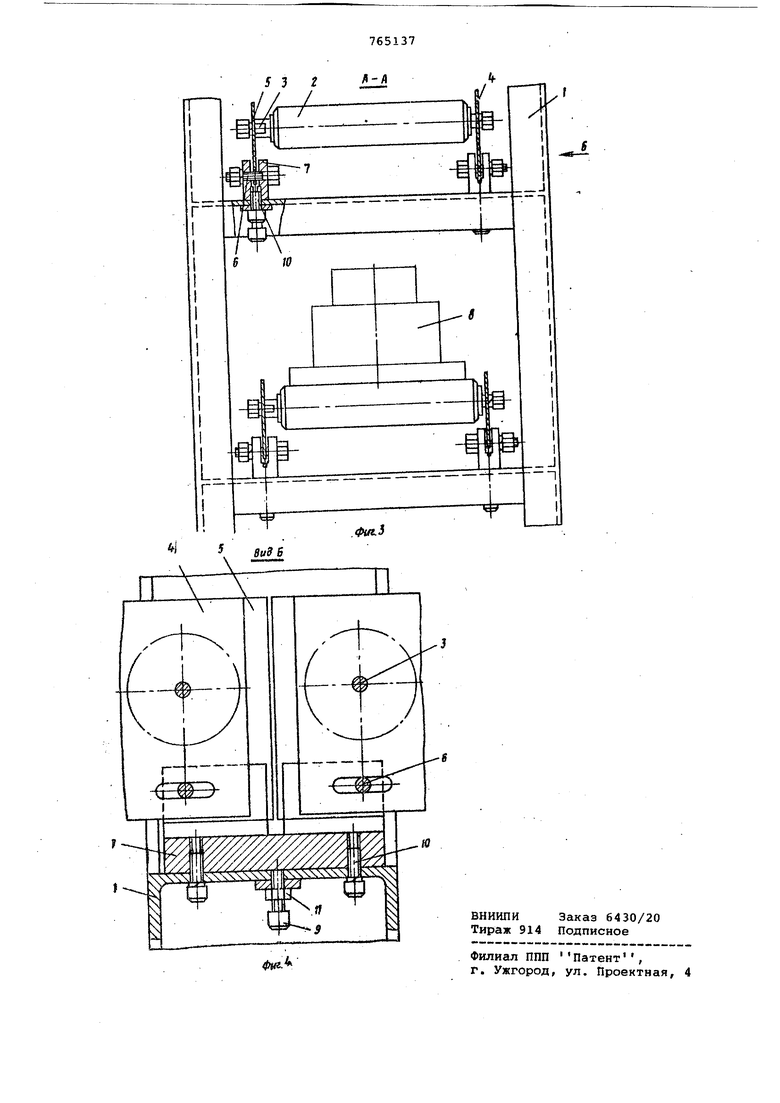
На фиг. 1 изображен конвейер, вид .сбоку} на фиг. 2 - то же, вид сверху; на фиг. 3 - разрез А-А на фиг. 2/ на фиг.-4 - вид по стрелке Б на фиг.З.
Конвейер содержит раму 1, на которой смонтированы опорные ролики 2. Оси 3 роликов установлены в отверстиях внутренней 4 и наружной 5 спиральных опор, которые закреплены винтами 6 в зажимных элементах 7. Опоры 4 и 5 имеют возможность перемещения вдоль направления движения груза 8. Зажимные элементы 7 установлены на подпятниках 9 в виде винтов и крепятся с помощью винтов 10. Подпятники установлены в раме 1 конвейера с возможностью перемещения по высоте. Фиксация подпятников на заданном уровне осуществляется с помощью контргайки 11.
Для подачи груза в верхней части конвейера установлен рольганг 12,а для отвода - рольганг 13.
Конвейер работает следующим образом.
По рольгангу 12 груз попадает на опорные ролики 2 гравитационного конвейера со спиральной трассой и в конце пути переходит на отводящий рольганг 13. По рабочему лотку конвейера груз перемещается с установленной скоростью. Регулирование скорости осуществляется путем перемещения спиральных опор 4 и 5.
Для уменьшения скорости груза перемещают секцию внутренней спиральной опоры 4 вперед вдоль направления движения груза (вниз по спирали), оставляя неподвижной наружную спиральную опору 5. Оси 3 роликов 2 устанавливаются под острым углом к радиусу изгиба трассы конвейера.Это приводит к тому,что кинематическая энергия irpyза 8,движущегося по роликам,будет затрачиваться на преодоление не только сил трения качения, но и сил трения скольжения по линии касания груза и ролика. Величина сил треЯия скольжения зависит от угла наклона оси ролика относительно радиуса изгиба трассы конвейера. При определенной величине этого угла груз будет касаться части наружной спиральной опоры, выступающей над роликами, и обкатываться по ней. При этом силы трения скольжения резко возрастают и скорость груза уменьшается.
Для увеличения скорости движения груза секцию внутренней спиральной опоры 4 перемещают назад (вверх по спирали).
Достижение точной установки рабочего полотна конвейера осуществляется регулировкой высоты подпятников 9.
Предлагаемая конструкция конвейера позволяет обеспечить бесступенчатое регулирование скорости перемещения груза по всей длине конвейера.
Формула изобретения
1.Гравитационный роликовый конвейер со спиральной трассой, содержащий опорные ролики, оси которых установлены в спиральных опорах, смонтированных на раме, о т л и ч аю ц и и с я тем, что, с целью упрощения конструкции и обеспечения бесступенчатого регулирования скорости перемещения груза по всей длине конвейера, последний снабжен установленными в раме подпятниками с закрепленными на них зажимными элементами, в которых установлены с возможностью перемещения вдоль направления движения груза спиральные опоры, при этом подпятники установлены с возможностью перемещения по высоте и фиксации на заданном уровне.
2.Конвейер поп.1,ртличаюnt и и с я тем, что подпятники выполнены в виде винтов.
Источники информации, принятые во внимание при экспйртиэе
1.Авторское свидетельство СССР 380562, кл. В 65 q 13/075, 1971.
2.Козьмин П.С. Машины непрерывного транспорта. Часть 111, М.-Л., Главная редакция литературы по машиностроению и металлообработке, 1936,
с. 55, фиг. 66 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕЛЕЖКА С МОДУЛЕМ ТОРМОЖЕНИЯ ДЛЯ ГРАВИТАЦИОННО-ПОДВЕСНОГО КОНВЕЙЕРА | 2012 |
|
RU2557320C2 |
| Конвейер для транспортирования штучных грузов | 1990 |
|
SU1795951A3 |
| Гравитационный рольганг с пространственной трассой | 1981 |
|
SU984948A1 |
| Устройство для транспортирования штучных грузов по криволинейной трассе | 1980 |
|
SU906828A1 |
| Тормозной гидравлический ролик гравитационного конвейера | 1989 |
|
SU1713857A1 |
| КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2001 |
|
RU2206486C1 |
| Транспортное средство | 1990 |
|
SU1735163A1 |
| Роликовый конвейер | 1989 |
|
SU1720949A1 |
| Гравитационный роликовый конвейер | 1977 |
|
SU686945A1 |
| Роликовый конвейер | 1980 |
|
SU880897A1 |