1
Изобретение относится к области транспортного машиностроения, преимущественно к производству гусеничных машин.
Известно устройство для натяжения гусениц гусеничной машины, содержащее смонтированные на корпусе ходовой части машины телескопические кронштейны с винтовыми механизмами перемещения натяжных колес гусениц, каждый из которых имеет винт и гайку Fll.
Однако привод винта непосредственно через гЬловку значительно усложняет процесс обслуживания, так как для поворота винта требуется большое усилие.
Известно также устройство для натяжения гусениц гусеничной машины, содержащее смонтированные на корпусе машины винтовые механизмы натяжения натяжных колес параллельных гусениц, причем винтовые механизмы кинематически связаны мeжjзy собой и снабжены червячным механизмом, состоящим ид
червяка с хвостовиком и червячного колеса .
Это устройство обеспечивает более плавную регулировку натяжения гусеницы при меньшей затрате усилий при обслуживании машины, так как оно снабжено червячным механизмом, соединенным с винтовым механизмом.
Однако процесс регулировки натяжения гусениц с помощью этого устройства является трудоемким, особенно в транспортном средстве со спаренными гусеницами, а само устройство имеет сложную конструкцию.
Цель изобретения - снижение трудо амкости регулировки и упрощение конструкции устройства.
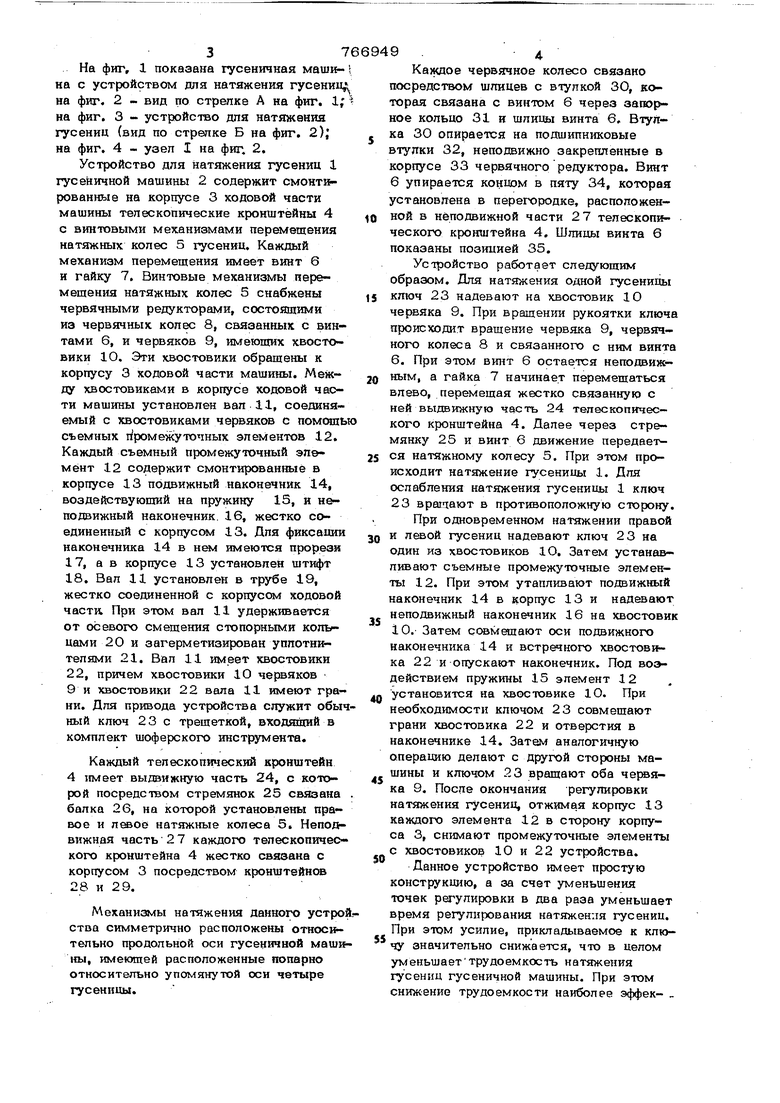
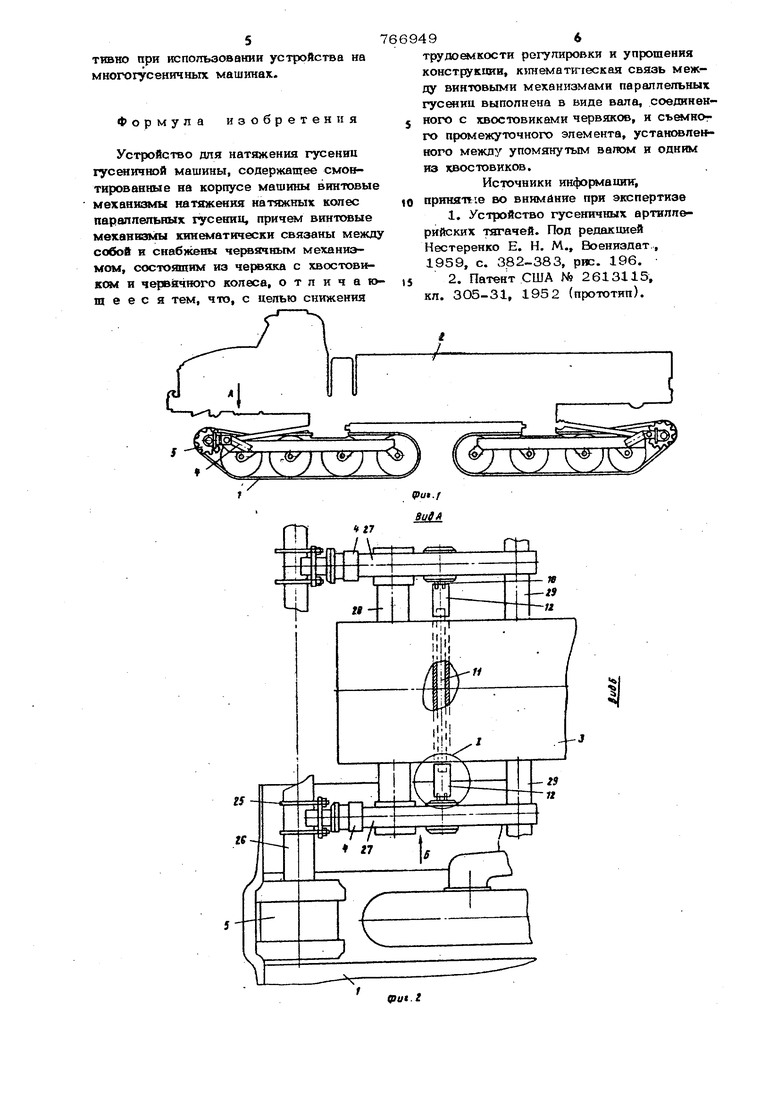
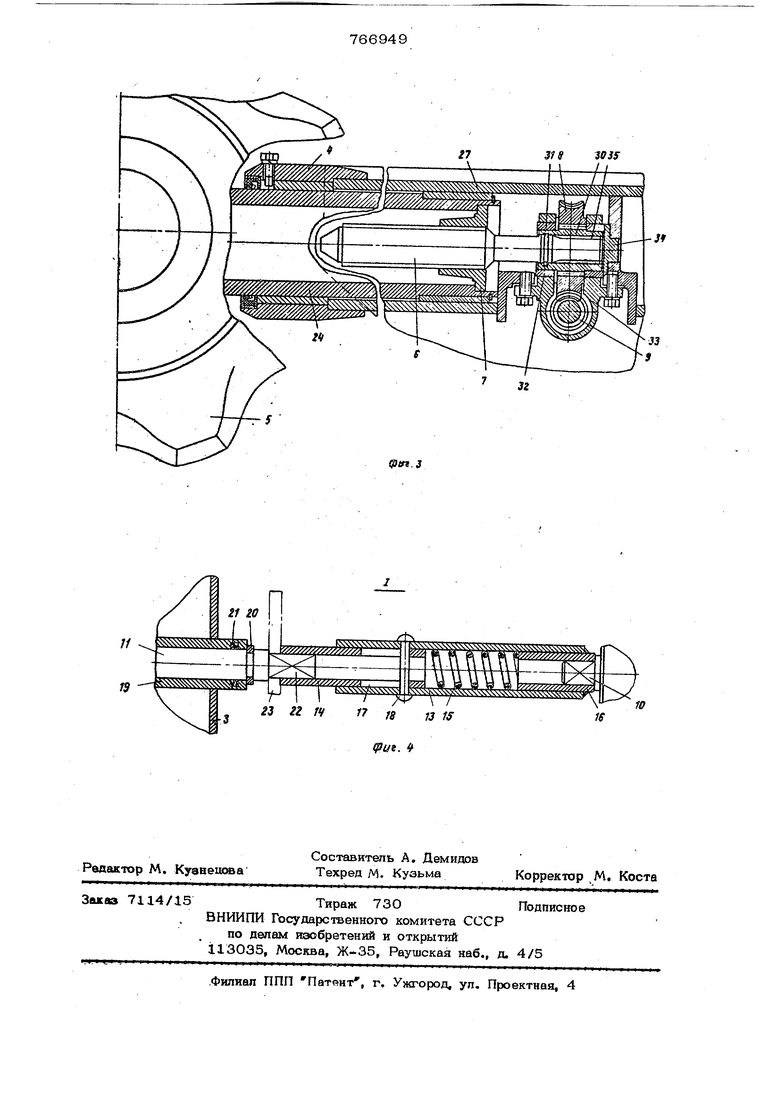
Цель достигается тем, что кинематическая связь между винтовьгми меха- - низмами параллельных гусениц выполнена в виде вала, соединенного с хвостовиками червяков, и съемного промежуточного элемента, установленного между упомянутым валом и одним из хиостойиков. На фиг, 1 показана гусеничная машина с устройством для натяжения гусениц на фиг. 2 - вид по стрелка А на фиг. 1; на фиг. 3 - устройство для натяжения гусениц (вид по стрелке Б на фиг. 2), на фиг. 4 - узел I на фиг. 2. Устройство для натяжения гусениц 1 гусеничной машины 2 содержит смонтированные на корпусе 3 ходовой части машины телескопические кронштейны 4 с винтовыми механизмами перемещения натяжных колес 5 гусениц. Каждый механизм перемещения имеет винт 6 и гайку 7. Винтовые механизмы перемещения натяжных колес 5 снабжены червячными редукторами, состоящими из червячных колес 8, связанных с винтами 6, и червяков 9, имеющих хвостовики 1О. Эти хвостовики обращены к корпусу 3 ходовой части машины. Между хвостовиками в корпусе ходовой части машины установлен вал 11, соединяемый с хвостовиками червяксю с помсшь съемных промежуточных элементов 12. Каждый съемный промежуточный элемент 12 содержит смонтированные в корпусе 13 подвижный наконечник 14, воздействующий на пружину IS, и неподвижный наконечник. 16, жестко соединенный с корпусом 13. Для фиксашга наконечника 14 в нем имеются прорези 17,а в корпусе 13 установлен штифт 18.Вал 11 установлен в трубе 19, жестко соединенной с корпусом ходовой часта При этом вал 11 удерживается от осевого смещения стопорными кольцами 20 и загерметизирован уплотнителями 21. Вал 11 имеет хвостовики 22, причем хвостовики Ю червяков 9 и хвостовики 22 вала 11 имеют гра ни. Для привода устройства служит обы ный ключ 23с трещеткой, входящий в комплект шоферского инструмента. Каждый телескопический к{х)нштейн 4 1гмеет выдаижную часть 24, с которой посредством стремянок 25 связана балка 26, на которой установлены правое и левое натяжные колеса 5. Непод вижная часть 27 каждого телескопичес кого кронштейна 4 жестко связана с корпусом 3 посредством кронштейнов 28 и 29. Механизмы натяжения данного устро ства симметрично расположены относи тельно продольной оси гусеничной маш Иы, имеющей расположенные попарно относительно упомянутой оси четыре гусеницы. Каждое червячное колесо связано посредством шлицев с втулкой 30, которая связана с винтом 6 через запорное кольцо 31 и шлицы винта 6, Втулка 30 опирается на подшипниковые втулки 32, неподвижно закрепленные в корпусе 33 червячного редуктора. Винт 6 упирается концом в пяту 34, которая установлена в перегородке, расположенной в неподвижной части 27 телескопического кронштейна 4. Шлицы винта 6 показаны позицией 35. Устройство работает следующим образом. Для натяжения одной гусеницы ключ 23 надевают на хвостовик 10 червяка 9. При вращении рукоятки ключа происходит вращение червяка 9, червяЕЧного колеса 8 и связанного с ним винта 6. При этом винт 6 остается неподвижным, а гайка 7 начинает перемещаться влево, перемещая жестко связанную с ней выдвижную часть 24 телескопического кронштейна 4. Далее через стремянку 25 и винт 6 движение передается натяжному колесу 5. При этом происходит натяжение гусеницы 1. Для ослабления натяжения гусеницы 1 ключ 23 вращают в противоположную сторону. При одновременном натяжении правой и левой гусениц надевают ключ 23 на один из хвостовиков 1О. Затем устанавливают съемные промежуточные элементы 12. При этом утапливают подвижный наконечник 14 в корпус 13 и надевают неподвижный наконечник 16 на хвостовик 10. Затем совмещают оси подвижного наконечника 14 и встречного хвостовика 22 и опускают наконечник. Под воэдействием пружины 15 элемент 12 установится на хвостовике 10. При необходимости ключом 23 совмещают грани хвостовика 22 и отверстия в наконечнике 14. Затем аналогичную операцию делают с другой стороны машины и ключом 23 вращают оба черюяка 9. После окончания регулировки натяжения гусениц, отжимая корпус 13 каждого элемента 12 в сторону корпуса 3, снимают промежуточные элементы с хвостовиков 10 и 22 устройства. Данное устройство имеет простую конструкцию, а за счет уменьшения точек регулировки в два раза уменьшает время регулирования натяженля гусениц. При этом усилие, прикладываемое к ключу значительно снижается, что в целом уменьшаеттрудоемкость натяжения гусениц гусеничной машины. При этом снижение трудоемкости наиболее эффек-
тивно при испоттьзовании устройства на многюгусеничных машинах.
Формула изобретения
Устройство для натяжения гусениц гусеничной машины, содержащее смоитированшле на корпусе машины винтовые механизмы натяжения нат$скнык колес параллельных гусениц, причем винтстые механизмы кинематически связаны между собой и сна6жеш 1 че юячным механизмом, состоящим из червяка с хвостов ком и че йчного колеса, о т л и ч а е е с я тем, что, с целью снижения
трудоемкости регулировки и упрощения конструкции, кинематическая связь между винтовыми механизмами параллельных гусениц выполнена в виде вала, соединенного с хвостовиками червяков, и го промежуточного элемента, установленного между упомянутым валом и одним из хвостовике®.
Источники инфО((а1гаи, принятие во внимание при экспертизе
1,Устройство гусеничных артиллерийских тягачей. Под редакцией Нестеренко Е. Н, М., Военнздат , 1959, с. 382-383, рис. 196.
2.Патент США N9 2613115, кл. ЗО5-31, 1952 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Гусеничная машина | 1978 |
|
SU685544A1 |
| Устройство для натяжения гусеничной цепи транспортного средства | 1990 |
|
SU1733318A1 |
| Ходовая часть гусеничного транспортного средства | 1979 |
|
SU998208A1 |
| Подвеска направляющего колесагуСЕНичНОй МАшиНы | 1979 |
|
SU806517A1 |
| УСТРОЙСТВО ДЛЯ НАТЯЖЕНИЯ ГУСЕНИЧНЫХ ЦЕПЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 1973 |
|
SU380516A1 |
| ВОЕННАЯ ГУСЕНИЧНАЯ МАШИНА | 2007 |
|
RU2404400C2 |
| Устройство для автоматической смены инструмента на металлорежущем станке | 1984 |
|
SU1252113A1 |
| Шарнирно-сочлененная гусеничная машина | 1988 |
|
SU1523459A1 |
| Устройство для синхронного изменения ширины колеи ведущих направляющих колес транспортного средства и длины рулевой тяги | 1983 |
|
SU1100153A1 |
| Стенд для испытания гусеничного движителя | 1990 |
|
SU1755091A1 |
(put.l 3fS 30 3S
